带有升降平台的四爪机械手及自动装配机的制作方法
本技术属于自动化装配,具体涉及一种带有升降平台的四爪机械手及自动装配机。
背景技术:
1、随着自动化技术的发展,机械手已广泛应用于各个自动化装配领域,在进行自动化装配时,通常是用一个机械手抓住一个零部件,然后将其与其它零部件进行装配。在精密的机械装配作业中,往往需要对零部件进行精确定位,并且通常需要施加较大的压入力才能完成装配。现有的机械手在高度方向上无法对工件进行精确定位,且装配时压入力往往由手指和工件之间的摩擦力提供,受限于手指的夹持力,通常无法提供足够的压入力。
技术实现思路
1、有鉴于此,本实用新型的目的是提供一种带有升降平台的四爪机械手及自动装配机,以解决现有技术中的不足。
2、为了达到上述目的,本实用新型的目的是通过下述技术方案实现的:
3、一方面,提供一种带有升降平台的四爪机械手,包括:
4、升降平台;
5、升降驱动器,驱动所述升降平台上下升降运动;
6、两组平行夹爪,穿过所述升降平台向上伸出并呈交叉分布;以及,
7、夹持驱动器,驱动相应的一组所述平行夹爪平行开合。
8、如所述带有升降平台的四爪机械手,所述升降驱动器包括第一双向丝杠、第一丝杠旋转驱动器、第一底部直线导轨、左导轨滑块、右导轨滑块、左楔形滑块、右楔形滑块、左斜面直线导轨、右斜面直线导轨、左支撑滑块和右支撑滑块,所述第一丝杠旋转驱动器的固定端固定连接所述第一底部直线导轨的一端,所述第一丝杠旋转驱动器的旋转输出端固定连接所述第一双向丝杠的一端,所述左楔形滑块、所述右楔形滑块分别设于所述第一双向丝杠的正向螺纹端、反向螺纹端并通过所述左导轨滑块、所述右导轨滑块与所述第一底部直线导轨滑动连接,所述左楔形滑块和所述右楔形滑块的斜面相对布置,所述左斜面直线导轨、所述右斜面直线导轨分别设于所述左楔形滑块、所述右楔形滑块的斜面上并沿所述斜面的倾斜方向布置,所述左支撑滑块和所述右支撑滑块的上端固定连接所述升降平台,所述左支撑滑块、所述右支撑滑块的下端分别与所述左斜面直线导轨、所述右斜面直线导轨滑动连接。
9、如所述带有升降平台的四爪机械手,所述夹持驱动器包括第二双向丝杠、第二丝杠旋转驱动器、第二底部直线导轨、左导轨支撑滑块和右导轨支撑滑块,所述第二丝杠旋转驱动器的固定端固定连接所述第二底部直线导轨的一端,所述第二丝杠旋转驱动器的旋转输出端固定连接所述第二双向丝杠的一端,所述左导轨支撑滑块、所述右导轨支撑滑块分别设于所述第二双向丝杠的正向螺纹端、反向螺纹端,所述左导轨支撑滑块、所述右导轨支撑滑块的底端与所述第二底部直线导轨滑动连接,相应的一组所述平行夹爪分别固定于所述左导轨支撑滑块、所述右导轨支撑滑块的顶部。
10、如所述带有升降平台的四爪机械手,所述升降平台开设有两条交叉分布的导向槽,两组所述平行夹爪分别穿过所述导向槽,两组所述平行夹爪的中心线重合于两条所述导向槽的交叉点,两组所述平行夹爪的顶面所构成平面平行于所述升降平台的顶面。
11、如所述带有升降平台的四爪机械手,还包括底座,所述升降平台、所述升降驱动器、所述平行夹爪和所述夹持驱动器均设于所述底座上。
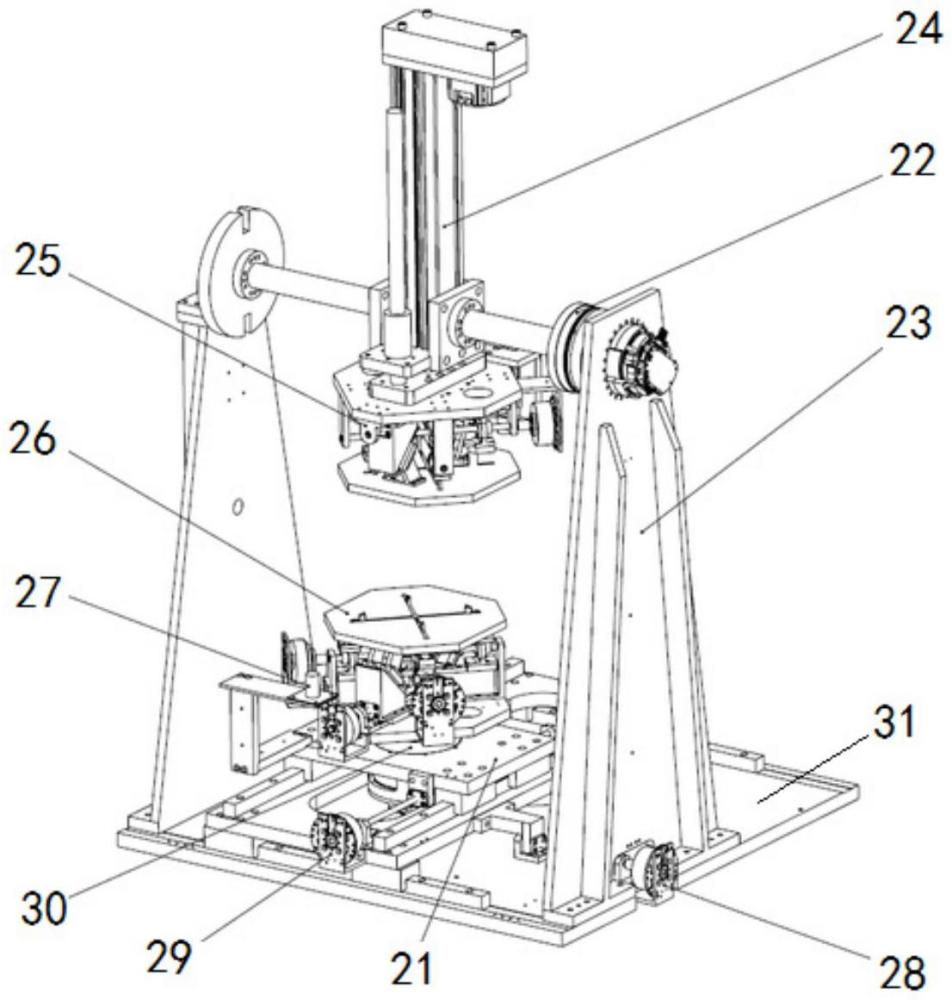
12、另一方面,提供一种自动装配机,包括伺服定位器、移动平台、翻转器、翻转支架、伺服推杆、上机械手、下机械手和视觉系统,所述伺服定位器包括x向直线伺服驱动器、y向直线伺服驱动器和回转伺服驱动器,所述下机械手通过所述回转伺服驱动器设于所述移动平台上,所述x向直线伺服驱动器、所述y向直线伺服驱动器分别用于驱动所述移动平台进行x向移动和y向移动并精确定位,所述翻转器通过所述翻转支架设于所述下机械手的上方,所述上机械手和所述伺服推杆均设于所述翻转器上,所述伺服推杆驱动所述上机械手进行z向移动并精确定位,所述视觉系统用于识别所述上机械手或所述下机械手上抓取的零部件的位姿信息,所述上机械手、所述下机械手为任意一项所述带有升降平台的四爪机械手。
13、如所述自动装配机,所述视觉系统设于所述下机械手的一侧或者所述伺服推杆的末端。
14、如所述自动装配机,还包括伺服底座,所述移动平台设于所述伺服底座上,所述翻转支架包括两块竖立于所述伺服底座上的竖板,所述翻转器横跨连接于两块所述竖板之间。
15、本实用新型技术方案的有益效果是:
16、能稳定地抓取不同形状的零件,并且可根据被抓取零件的结构调整升降平台的位置,确保机械手在抓取零件时定位更加精确,在装配作业时升降平台还可提供装配所需的压入力,自动装配机可替代人工完成完成自动装配作业。
技术特征:
1.一种带有升降平台的四爪机械手,其特征在于,包括:
2.如权利要求1所述带有升降平台的四爪机械手,其特征在于,所述升降驱动器包括第一双向丝杠、第一丝杠旋转驱动器、第一底部直线导轨、左导轨滑块、右导轨滑块、左楔形滑块、右楔形滑块、左斜面直线导轨、右斜面直线导轨、左支撑滑块和右支撑滑块,所述第一丝杠旋转驱动器的固定端固定连接所述第一底部直线导轨的一端,所述第一丝杠旋转驱动器的旋转输出端固定连接所述第一双向丝杠的一端,所述左楔形滑块、所述右楔形滑块分别设于所述第一双向丝杠的正向螺纹端、反向螺纹端并通过所述左导轨滑块、所述右导轨滑块与所述第一底部直线导轨滑动连接,所述左楔形滑块和所述右楔形滑块的斜面相对布置,所述左斜面直线导轨、所述右斜面直线导轨分别设于所述左楔形滑块、所述右楔形滑块的斜面上并沿所述斜面的倾斜方向布置,所述左支撑滑块和所述右支撑滑块的上端固定连接所述升降平台,所述左支撑滑块、所述右支撑滑块的下端分别与所述左斜面直线导轨、所述右斜面直线导轨滑动连接。
3.如权利要求1所述带有升降平台的四爪机械手,其特征在于,所述夹持驱动器包括第二双向丝杠、第二丝杠旋转驱动器、第二底部直线导轨、左导轨支撑滑块和右导轨支撑滑块,所述第二丝杠旋转驱动器的固定端固定连接所述第二底部直线导轨的一端,所述第二丝杠旋转驱动器的旋转输出端固定连接所述第二双向丝杠的一端,所述左导轨支撑滑块、所述右导轨支撑滑块分别设于所述第二双向丝杠的正向螺纹端、反向螺纹端,所述左导轨支撑滑块、所述右导轨支撑滑块的底端与所述第二底部直线导轨滑动连接,相应的一组所述平行夹爪分别固定于所述左导轨支撑滑块、所述右导轨支撑滑块的顶部。
4.如权利要求1所述带有升降平台的四爪机械手,其特征在于,所述升降平台开设有两条交叉分布的导向槽,两组所述平行夹爪分别穿过所述导向槽,两组所述平行夹爪的中心线重合于两条所述导向槽的交叉点,两组所述平行夹爪的顶面所构成平面平行于所述升降平台的顶面。
5.如权利要求1所述带有升降平台的四爪机械手,其特征在于,还包括底座,所述升降平台、所述升降驱动器、所述平行夹爪和所述夹持驱动器均设于所述底座上。
6.一种自动装配机,其特征在于,包括伺服定位器、移动平台、翻转器、翻转支架、伺服推杆、上机械手、下机械手和视觉系统,所述伺服定位器包括x向直线伺服驱动器、y向直线伺服驱动器和回转伺服驱动器,所述下机械手通过所述回转伺服驱动器设于所述移动平台上,所述x向直线伺服驱动器、所述y向直线伺服驱动器分别用于驱动所述移动平台进行x向移动和y向移动并精确定位,所述翻转器通过所述翻转支架设于所述下机械手的上方,所述上机械手和所述伺服推杆均设于所述翻转器上,所述伺服推杆驱动所述上机械手进行z向移动并精确定位,所述视觉系统用于识别所述上机械手或所述下机械手上抓取的零部件的位姿信息,所述上机械手、所述下机械手为权利要求1至5中任意一项所述带有升降平台的四爪机械手。
7.如权利要求6所述自动装配机,其特征在于,所述视觉系统设于所述下机械手的一侧或者所述伺服推杆的末端。
8.如权利要求6所述自动装配机,其特征在于,还包括伺服底座,所述移动平台设于所述伺服底座上,所述翻转支架包括两块竖立于所述伺服底座上的竖板,所述翻转器横跨连接于两块所述竖板之间。
技术总结
本技术公开了一种带有升降平台的四爪机械手及自动装配机,机械手包括:升降平台;升降驱动器,驱动所述升降平台上下升降运动;两组平行夹爪,穿过所述升降平台向上伸出并呈交叉分布;夹持驱动器,驱动相应的一组所述平行夹爪平行开合。本技术技术方案能稳定地抓取不同形状的零件,并且可根据被抓取零件的结构调整升降平台的位置,确保机械手在抓取零件时定位更加精确,在装配作业时升降平台还可提供装配所需的压入力,自动装配机可替代人工完成完成自动装配作业。
技术研发人员:胡爱军,赵仕勤
受保护的技术使用者:上海岭先机器人科技股份有限公司
技术研发日:20230720
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!