机器人视觉稳定装置
本技术属于视觉定位,具体涉及一种机器人视觉稳定装置。
背景技术:
1、机器视觉就是利用机器代替人眼来做各种测量和判断,它是计算机学科的一个重要分支,它综合了光学、机械、电子、计算机软硬件等方面的技术,涉及到计算机、图像处理、模式识别、人工智能、信号处理、光机电一体化等多个领域。图像处理和模式识别等技术的快速发展,也大大地推动了机器视觉的发展。
2、申请号为2022217458638的中国专利公开了一种机器人视觉定位装置,包括横向滑动件、安装支架、滑动连接件、垂直电机、滑动阻挡件、距离传感器、垂直滑动件、升降支架、升降旋钮、视觉传感器、反光镜和转动支架;横向滑动件顶部与安装支架连接;垂直电机输出端与横向滑动件侧面传动连接。通过本装置能够在进行视觉采集的同时能够有效的提高本装置的定位效率和定位精确度,通过本装置的滑动定位结构能够防止本装置发生过量滑动,从而提高了本装置的滑动稳定性,反光镜的结构能够为本装置视觉传感器进行补光,从而提高了识别准确率。
3、上述专利方案具有提升识别准确率的效果,但是,在进行视觉的采集时,机器人会由于自身的移动,影响机器人的图像采集和识别,机器人的视觉采集的区域会发生变化。
技术实现思路
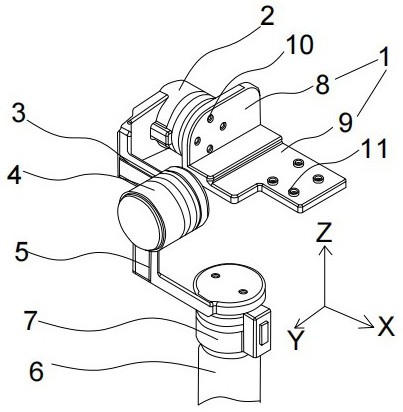
1、为解决上述问题,本实用新型提供一种机器人视觉稳定装置,包括安装座,所述安装座的侧边连接有第一旋转驱动装置,所述第一旋转驱动装置的侧边连接有第一支架,所述第一支架一端连接有第二旋转驱动装置,所述第二旋转驱动装置的中心轴线与第一旋转驱动装置的中心轴线垂直,所述第二旋转驱动装置的底部连接有第二支架,所述第二支架的底部连接有支撑部。
2、较佳的,所述支撑部的顶部连接有第三旋转驱动装置,所述第三旋转驱动装置的中心轴线与第二旋转驱动装置的中心轴线垂直。
3、较佳的,所述支撑部为电动伸缩杆。
4、较佳的,所述安装座包括第一连接板和第二连接板,所述第一连接板和第二连接板垂直设置,所述第一连接板上设有第一连接螺栓孔,所述第二连接板上设有第二连接螺栓孔。
5、较佳的,所述第一支架和第二支架上都设有连接盘,所述连接盘上设有连接孔,所述第二旋转驱动装置和第三旋转驱动装置的输出端都连接有连接板,所述连接板与对应的连接盘螺栓连接。
6、本实用新型的优点为:
7、1. 本方案中设有第一旋转驱动装置、第二旋转驱动装置和第三旋转驱动装置,能够全角度对安装座以及安装座的图像采集装置进行调节,当机器人由于移动造成视觉采集区域发生变化后,可以通过各旋转驱动装置对安装座进行调节,使得安装座上的图像采集装置能够重新对准相应区域,保证机器人视觉的稳定性。
8、2. 本方案中的支撑部位电动伸缩杆,能够图像采集装置的高度,进一步保证机器人视觉的稳定性。
技术特征:
1.一种机器人视觉稳定装置,其特征在于:包括安装座(1),所述安装座(1)的侧边连接有第一旋转驱动装置(2),所述第一旋转驱动装置(2)的侧边连接有第一支架(3),所述第一支架(3)一端连接有第二旋转驱动装置(4),所述第二旋转驱动装置(4)的中心轴线与第一旋转驱动装置(2)的中心轴线垂直,所述第二旋转驱动装置(4)的底部连接有第二支架(5),所述第二支架(5)的底部连接有支撑部(6)。
2.根据权利要求1所述的机器人视觉稳定装置,其特征在于:所述支撑部(6)的顶部连接有第三旋转驱动装置(7),所述第三旋转驱动装置(7)的中心轴线与第二旋转驱动装置(4)的中心轴线垂直。
3.根据权利要求2所述的机器人视觉稳定装置,其特征在于:所述支撑部(6)为电动伸缩杆。
4.根据权利要求3所述的机器人视觉稳定装置,其特征在于:所述安装座(1)包括第一连接板(8)和第二连接板(9),所述第一连接板(8)和第二连接板(9)垂直设置,所述第一连接板(8)上设有第一连接螺栓孔(10),所述第二连接板(9)上设有第二连接螺栓孔(11)。
5.根据权利要求4所述的机器人视觉稳定装置,其特征在于:所述第一支架(3)和第二支架(5)上都设有连接盘(12),所述连接盘(12)上设有连接孔(13),所述第二旋转驱动装置(4)和第三旋转驱动装置(7)的输出端都连接有连接板(14),所述连接板(14)与对应的连接盘(12)螺栓连接。
技术总结
本技术公开了一种机器人视觉稳定装置,包括安装座,所述安装座的侧边连接有第一旋转驱动装置,所述第一旋转驱动装置的侧边连接有第一支架,所述第一支架一端连接有第二旋转驱动装置,所述第二旋转驱动装置的中心轴线与第一旋转驱动装置的中心轴线垂直,所述第二旋转驱动装置的底部连接有第二支架,所述第二支架的底部连接有支撑部。本技术通过多个旋转驱动装置,能够对机器人视觉进行调整,使其能够持续稳定对准相应区域。
技术研发人员:沈彬,郭发勇,冯雨琪,李琳
受保护的技术使用者:常州工程职业技术学院
技术研发日:20230721
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!