一种捡球机器人
本技术涉及服务机器人,具体涉及一种捡球机器人。
背景技术:
1、近年来,随着服务机器人的迅速发展,越来越多的服务机器人被应用到服务、医疗、教育、体育和娱乐等领域,其中捡球机器人作为服务协助类的一种,目前已有多种形式的捡球收集机器人。
2、现有的捡球机器人仅通过一个机械臂和设置在前端的机械爪配合来抓取球体,可将球体抓起,然后投放到存储箱中。由于机械爪结构相对较为复杂,且结合机械臂进行位置来回定位来拾取,操作繁琐,拾取效率不高,拾取模式单一,亟待改进。
技术实现思路
1、本实用新型的目的在于提供一种捡球机器人,以解决现有技术中捡球机器人拾取结构较为复杂,操作繁琐,拾取效率不高,拾取模式单一的技术问题。
2、本实用新型所要解决的技术问题可以通过以下技术方案实现:
3、一种捡球机器人,包括移动小车和捡拾装置,所述移动小车上设置有储球箱,所述移动小车的一端设置有基座,所述捡拾装置配合设置在基座上;
4、所述捡拾装置包括夹球机构和吸球机构;
5、所述夹球机构包括第一机械臂组件和夹持组件,所述第一机械臂组件连接在基座的一侧,所述夹持组件设置在所述第一机械臂组件的执行端;
6、所述吸球机构包括第二机械臂组件、抽吸管和抽风装置;所述第二机械臂组件连接在基座的另一侧,所述抽吸管配合连接在第二机械臂组件上,所述抽风装置连接在移动小车上,且抽吸管的一端与所述抽风装置的风道入口连接,所述抽风装置风道出口端与储球箱配合连接。
7、作为本实用新型进一步的方案:所述第一机械臂组件和第二机械臂组件结构相同,所述第一机械臂组件和第二机械臂组件均包括驱动电机一、转臂一和转臂二,所述驱动电机一连接在基座上,所述转臂一连接在驱动电机一的主轴端,所述转臂一的末端连接有驱动电机二,所述驱动电机二的主轴端连接有驱动电机三,所述转臂二连接在驱动电机三的主轴端。
8、作为本实用新型进一步的方案:所述夹持组件为多爪状机械手。
9、作为本实用新型进一步的方案:所述抽吸管为波纹管。
10、作为本实用新型进一步的方案:所述移动小车包括车架、车轮和伺服电机;所述车架两侧连接有u型支架,所述伺服电机连接在u型支架两端,所述车轮与伺服电机主轴端连接。
11、作为本实用新型进一步的方案:所述储球箱的内部一侧设置有第一存储腔,另一侧设置有第二存储腔,所述抽风装置的风道出口端穿插在第一存储腔内,所述储球箱的顶部一侧开设有与第二存储腔相配合的投放口。
12、作为本实用新型进一步的方案:所述抽风装置的风道出口端连接有软套袋。
13、作为本实用新型进一步的方案:所述第一存储腔和第二存储腔内均设置有抽屉盒,所述储球箱上开设有两个抽屉口,且抽屉口与对应的抽屉盒相配合,所述抽屉盒靠近抽屉口的一端连接有凸柄,所述抽屉盒靠近抽屉口的一端还连接有与抽屉口相配合的橡胶卡块。
14、本实用新型的有益效果:
15、1、本实用新型机器人设置有两组可分别控制运动的夹球机构和吸球机构,夹球机构依靠设置的第一机械臂组件多自由度运动,将球体抓取起来,吸球机构依靠第二机械臂组件多自由度运动,方便将球体吸起,完成拾取,即可实现有多种拾取模式,提升拾取效率。
16、2、本实用新型储球箱分设成第一存储腔和第二存储腔,依靠吸球机构吸起的球体可导入第一存储腔内,并且导入时经过软套袋缓冲,避免球体弹射跳起;而依靠夹球机构抓起的球体可通过投放口投入到第二存储腔内,第一存储腔和第二存储腔内均设置有抽屉盒,可存放拾取的球体,方便集中取出,使用方便。
技术特征:
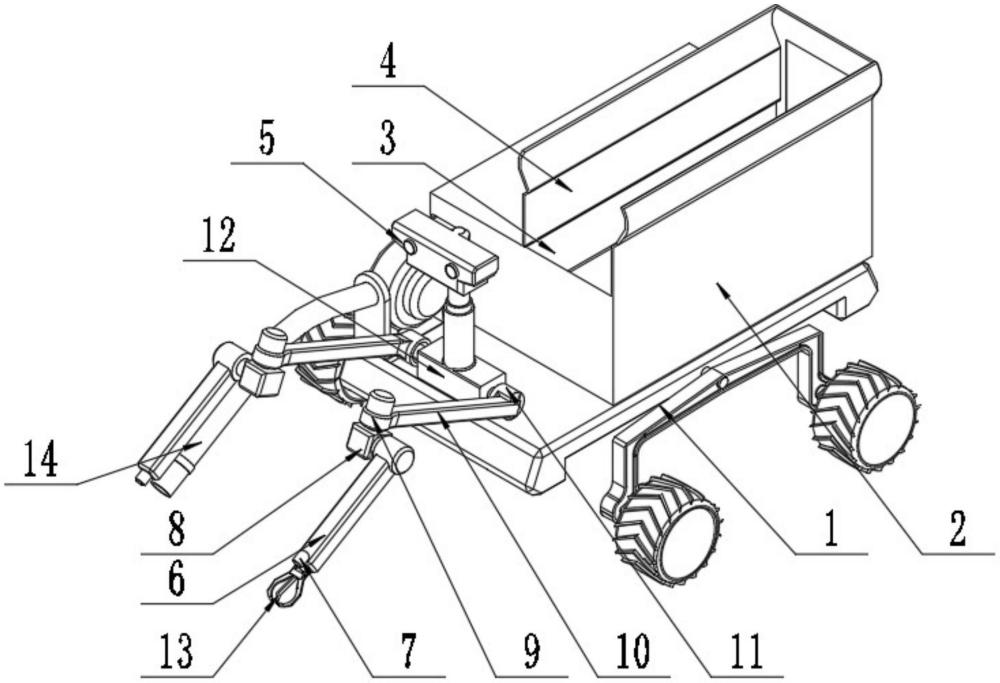
1.一种捡球机器人,包括移动小车(1)和捡拾装置,所述移动小车(1)上设置有储球箱(2),所述移动小车(1)的一端设置有基座(12),所述捡拾装置配合设置在基座(12)上;其特征在于:
2.根据权利要求1所述的一种捡球机器人,其特征在于,所述第一机械臂组件和第二机械臂组件结构相同,所述第一机械臂组件和第二机械臂组件均包括驱动电机一(11)、转臂一(10)和转臂二(6),所述驱动电机一(11)连接在基座(12)上,所述转臂一(10)连接在驱动电机一(11)的主轴端,所述转臂一(10)的末端连接有驱动电机二(9),所述驱动电机二(9)的主轴端连接有驱动电机三(8),所述转臂二(6)连接在驱动电机三(8)的主轴端。
3.根据权利要求1所述的一种捡球机器人,其特征在于,所述夹持组件(13)为多爪状机械手。
4.根据权利要求1所述的一种捡球机器人,其特征在于,所述抽吸管(14)为波纹管。
5.根据权利要求1所述的一种捡球机器人,其特征在于,所述移动小车(1)包括车架、车轮和伺服电机;所述车架两侧连接有u型支架,所述伺服电机连接在u型支架两端,所述车轮与伺服电机主轴端连接。
6.根据权利要求1所述的一种捡球机器人,其特征在于,所述储球箱(2)的内部一侧设置有第一存储腔(18),另一侧设置有第二存储腔(17),所述抽风装置(19)的风道出口端穿插在第一存储腔(18)内,所述储球箱(2)的顶部一侧开设有与第二存储腔(17)相配合的投放口(3)。
7.根据权利要求1所述的一种捡球机器人,其特征在于,所述抽风装置(19)的风道出口端连接有软套袋(20)。
8.根据权利要求6所述的一种捡球机器人,其特征在于,所述第一存储腔(18)和第二存储腔(17)内均设置有抽屉盒(15),所述储球箱(2)上开设有两个抽屉口(22),且抽屉口(22)与对应的抽屉盒(15)相配合,所述抽屉盒(15)靠近抽屉口(22)的一端连接有凸柄(23),所述抽屉盒(15)靠近抽屉口(22)的一端还连接有与抽屉口(22)相配合的橡胶卡块(21)。
技术总结
本技术公开了一种捡球机器人,涉及服务机器人技术领域,包括移动小车和捡拾装置,所述移动小车上设置有储球箱,所述移动小车的一端设置有基座,所述捡拾装置配合设置在基座上;所述捡拾装置包括夹球机构和吸球机构。本技术机器人设置有两组可分别控制运动的夹球机构和吸球机构,夹球机构依靠设置的第一机械臂组件多自由度运动,将球体抓取起来,吸球机构依靠第二机械臂组件多自由度运动,方便将球体吸起,完成拾取,即可实现有多种拾取模式,提升拾取效率。
技术研发人员:韦明,徐涛,王兴,王春玲,陈自红,钱杨
受保护的技术使用者:安徽三联学院
技术研发日:20230727
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!