自动伸缩机械臂的制作方法
本申请涉及机械臂领域,具体而言,涉及一种自动伸缩机械臂。
背景技术:
1、机械臂是具有与人类手臂相似功能的机械抓手,通常为各个关节连接使其转动,将各个关节组成一个运动链,它可代人的重劳动以实现生产的机械化和自动化,在使用时类似人类的手。
2、产品的结构可参照中国专利文献号202120058170.0中所公开的了一种新型伸缩机械臂,包括机械爪、横臂机构、角臂机构、侧壁机构和转盘机构,所述横臂机构、角臂机构、侧壁机构和转盘机构的下端均设置有轨道,且机械爪设置于轨道上,所述横臂机构、角臂机构、侧壁机构交互依次由上至下相接,且机械爪包括滑块、转动盘、伸缩杆和抓取装置。该新型伸缩机械臂,通过机械爪、横臂机构、角臂机构、侧壁机构和转盘机构的联动配合使用,可实现对相应物件的灵活抓取,角臂机构和抓取装置顶端的伸缩杆,可在使用时有效进行旋转操作,便于将轨道调节至所需抓取的位置,多个机械爪从而沿轨道运动至所需位置进行抓取作业,可实现大件货、多物品的灵。
3、上述结构中通过气缸来实现伸缩,由于气缸本身具有一定的长度,从而使得伸缩的长度较短。
4、现在需要一种具有伸缩长度较长的自动伸缩机械臂。
技术实现思路
1、本申请的内容部分用于以简要的形式介绍构思,这些构思将在后面的具体实施方式部分被详细描述。本申请的内容部分并不旨在标识要求保护的技术方案的关键特征或必要特征,也不旨在用于限制所要求的保护的技术方案的范围。
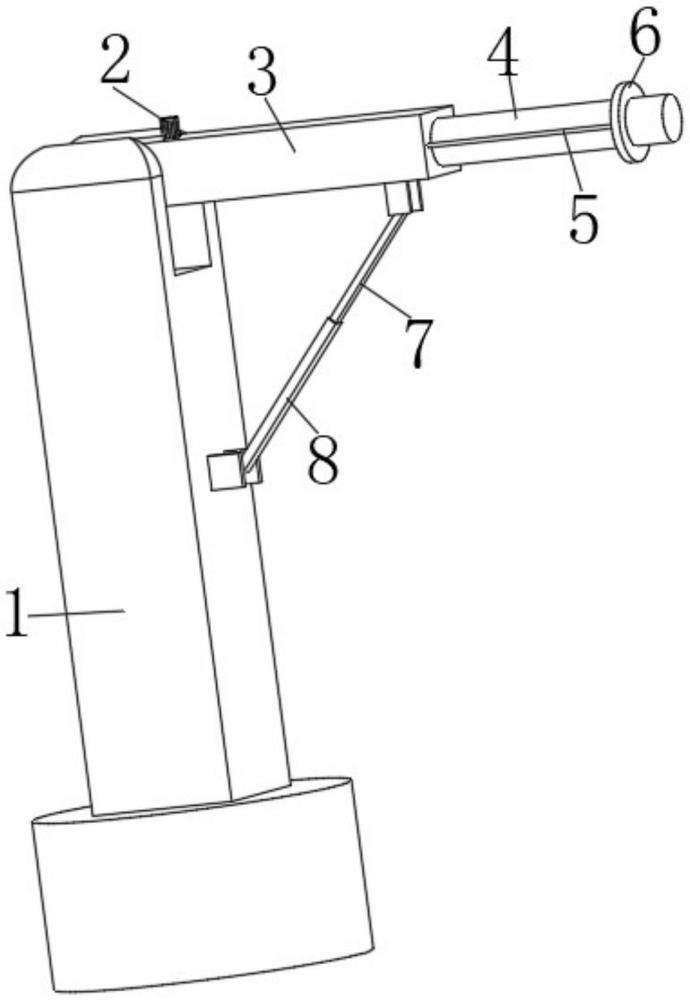
2、为了解决以上背景技术部分提到的技术问题,本申请的一些实施例提供了一种自动伸缩机械臂,包括:第一机械臂;第二机械臂,铰接在第一机械臂上,且第二机械臂上开设有连接槽;第三机械臂,滑动安装在连接槽上;螺杆,转动安装在连接槽的内壁上,且与第三机械臂螺纹连接;从动锥齿轮,固接在螺杆上;伺服电机,固接在第二机械臂上,且伺服电机的输出轴贯穿第二机械臂并延伸到连接槽内;主动锥齿轮,固接在伺服电机的输出轴上,且主动锥齿轮与从动锥齿轮啮合。
3、启动伺服电机,从而使得伺服电机的输出轴带动主动锥齿轮转动,由于主动锥齿轮与从动锥齿轮啮合,从而使得从动锥齿轮转动,从而使得螺杆转动,从而使得第三机械臂可在连接槽上左右滑动,且在螺杆的作用下,解决了气缸本身具有一定的长度,使得提升伸缩长度,同时稳定杆滑动安装在稳定槽上,进一步提高了第三机械臂移动时的稳定性。
4、进一步地,所述第三机械臂上固接有连接盘,且连接盘一端两侧均固接有稳定杆,且第二机械臂上开设有与稳定杆对应的稳定槽。
5、进一步地,所述第一机械臂和第二机械臂之间设置有支撑组件,所述支撑组件包括支撑件,所述第二机械臂上开设有t型槽,且t型槽上滑动安装有t型块,所述支撑件铰接在t型块和第一机械臂之间,所述支撑件包括连接筒和支撑杆,所述连接筒铰接在第一机械臂上,且支撑杆滑动安装在连接筒上,且支撑杆和连接筒之间固接有抵接弹簧,且支撑杆与第二机械臂铰接。
6、进一步地,所述t型块包括移动块和两个限位块,两个所述限位块固接在移动块的两端,所述t型槽包括安装槽和两个限位槽,所述安装槽和限位槽均开设在第二机械臂上,且安装槽与两个限位槽连通,且移动块滑动安装在安装槽上,限位块滑动安装在限位槽上。
7、进一步地,所述连接盘为圆盘型。
8、进一步地,所述稳定杆为圆柱形,且与稳定槽契合。
9、进一步地,所述第一机械臂、第二机械臂和伸缩件形成三角形结构。
10、进一步地,所述第三机械臂为圆柱形。
11、本申请的有益效果在于:提供了一种具体伸缩长度较长的自动伸缩机械臂。
技术特征:
1.一种自动伸缩机械臂,包括:
2.根据权利要求1所述的自动伸缩机械臂,其特征在于:
3.根据权利要求1所述的自动伸缩机械臂,其特征在于:
4.根据权利要求3所述的自动伸缩机械臂,其特征在于:
5.根据权利要求2所述的自动伸缩机械臂,其特征在于:
6.根据权利要求2所述的自动伸缩机械臂,其特征在于:
7.根据权利要求3所述的自动伸缩机械臂,其特征在于:
8.根据权利要求1所述的自动伸缩机械臂,其特征在于:
技术总结
本申请公开了一种自动伸缩机械臂,其属于机械臂领域。包括:第一机械臂;第二机械臂,铰接在第一机械臂上,且第二机械臂上开设有连接槽;第三机械臂,滑动安装在连接槽上。螺杆,转动安装在连接槽的内壁上,且与第三机械臂螺纹连接;从动锥齿轮,固接在螺杆上;伺服电机,固接在第二机械臂上,且伺服电机的输出轴贯穿第二机械臂并延伸到连接槽内。主动锥齿轮,固接在伺服电机的输出轴上,且主动锥齿轮与从动锥齿轮啮合。本申请的有益效果在于提供了一种伸缩长度较长的自动伸缩机械臂。
技术研发人员:郭岳军,叶芬芬,王芳,王仲华
受保护的技术使用者:浙江晶星齿轮电机有限公司
技术研发日:20230731
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!