一种电动箱体门结构及机器人的制作方法
本技术涉及机器人,特别涉及一种电动箱体门结构及机器人。
背景技术:
1、现有机器人的箱体门存在开关门不好控制的问题,容易产生较大的门缝或者出现门缝不均匀的问题。
技术实现思路
1、本实用新型公开了一种电动箱体门结构及机器人,便于门缝及开关门的控制。
2、为达到上述目的,本实用新型提供以下技术方案:
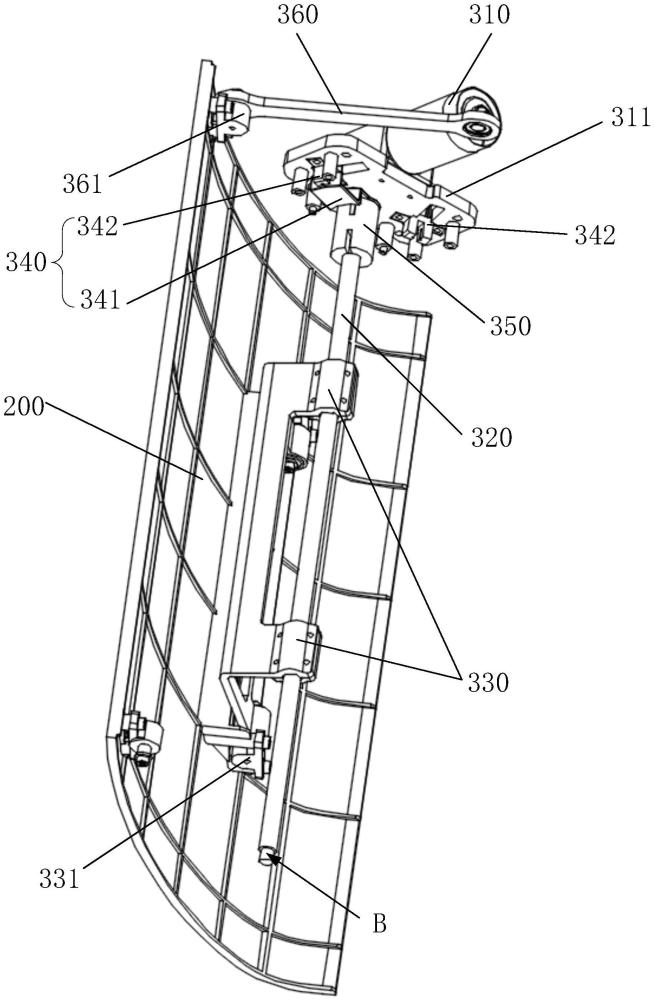
3、第一方面,本实用新型提供一种电动箱体门结构,包括:箱体主支架、箱体门以及安装于所述箱体主支架的驱动机构;
4、所述驱动机构包括驱动件、门轴、驱动杆和位置检测组件;
5、所述门轴转动安装于所述箱体主支架,所述驱动件与所述门轴传动连接;所述驱动杆一端与所述门轴相对固定,另一端与所述箱体门转动连接;所述驱动件用于驱动所述门轴转动,并通过与所述门轴连接的所述驱动杆带动所述箱体门转动;
6、所述位置检测组件用于检测所述门轴的转动角度。
7、上述电动箱体门结构中,驱动箱体门转动的驱动机构各部件均安装在箱体主支架上,减少多个部件关联的公差累积对箱体门的组装影响;检测箱体门开关状态的位置检测组件对驱动机构中门轴进行检测,并检测门轴的转动角度以确定箱体门的开关状态,减小了位置误差,更利于精准控制开关门,使关门更严,减小门缝产生。
8、在一些实施例中,所述位置检测组件包括位置检测片以及与所述位置检测片配合的位置检测器,所述位置检测片安装于所述驱动件的输出轴上。
9、在一些实施例中,所述驱动件与所述门轴通过柔性连接器传动连接。
10、在一些实施例中,所述驱动件的输出轴、所述柔性连接器以及所述位置检测片上均设置有扁位结构,且所述柔性连接器以及所述位置检测片上扁位结构的位置与所述驱动件的输出轴上扁位结构的位置对应。
11、在一些实施例中,所述驱动杆与所述门轴的中部固定;和/或,
12、所述驱动杆与所述箱体门通过第一固定转接件连接,且所述驱动杆上设置有用于与所述第一固定转接件转动连接的轴承。
13、在一些实施例中,所述电动箱体门结构还包括安装于所述箱体主支架的箱体层板,所述箱体层板包括平行且间隔设置的第一层板和第二层板,所述门轴位于所述第一层板和所述第二层板之间;
14、所述驱动件通过固定支架连接所述箱体主支架和所述第一层板;和/或,
15、所述驱动件通过固定支架连接所述箱体主支架和所述第二层板。
16、在一些实施例中,所述箱体门与所述驱动机构数量相同,且所述箱体门与所述驱动机构一一对应设置。
17、在一些实施例中,所述箱体层板还包括第三层板,且所述第三层板位于所述第一层板和所述第二层板之间;
18、位于所述第一层板和所述第三层板之间的门轴中,所述门轴通过门轴末端固定件连接所述箱体主支架和所述第三层板,且所述门轴与所述门轴末端固定件通过轴承转动连接;
19、位于所述第三层板和所述第二层板之间的门轴中,所述门轴通过门轴末端固定件连接所述箱体主支架和所述第三层板,且所述门轴与所述门轴末端固定件通过轴承转动连接。
20、在一些实施例中,一个所述驱动机构与至少两个所述箱体门对应时,至少两个箱体门沿门轴的轴线方向排列;
21、所述箱体层板还包括第三层板,且所述第三层板位于所述第一层板和所述第二层板之间;
22、一个所述驱动机构以及与其对应的多个所述箱体门中,所述第三层板位于任意相邻两个箱体门之间,门轴贯穿所述第三层板并与所述第三层板转动连接。
23、在一些实施例中,所述驱动机构还包括从动杆,当所述驱动件安装于所述第一层板时,所述从动杆一端与所述箱体门转动连接,另一端与所述第一层板转动连接;当所述驱动件安装于所述第二层板时,所述从动杆一端与所述箱体门转动连接,另一端与所述第二层板转动连接。
24、在一些实施例中,所述从动杆两端均设置有轴承。
25、第二方面,本实用新型还提供一种机器人,包括如第一方面中任一项所述的电动箱体门结构。
技术特征:
1.一种电动箱体门结构,其特征在于,包括:箱体主支架、箱体门以及安装于所述箱体主支架的驱动机构;
2.根据权利要求1所述的电动箱体门结构,其特征在于,所述位置检测组件包括位置检测片以及与所述位置检测片配合的位置检测器,所述位置检测片安装于所述驱动件的输出轴上。
3.根据权利要求2所述的电动箱体门结构,其特征在于,所述驱动件与所述门轴通过柔性连接器传动连接。
4.根据权利要求3所述的电动箱体门结构,其特征在于,所述驱动件的输出轴、所述柔性连接器以及所述位置检测片上均设置有扁位结构,且所述柔性连接器以及所述位置检测片上扁位结构的位置与所述驱动件的输出轴上扁位结构的位置对应。
5.根据权利要求1所述的电动箱体门结构,其特征在于,所述驱动杆与所述门轴的中部固定;和/或,
6.根据权利要求1所述的电动箱体门结构,其特征在于,所述箱体门与所述驱动机构数量相同,且所述箱体门与所述驱动机构一一对应设置。
7.根据权利要求1-6中任一项所述的电动箱体门结构,其特征在于,所述电动箱体门结构还包括安装于所述箱体主支架的箱体层板,所述箱体层板包括平行且间隔设置的第一层板和第二层板,所述门轴位于所述第一层板和所述第二层板之间;
8.根据权利要求7所述的电动箱体门结构,其特征在于,所述箱体层板还包括第三层板,且所述第三层板位于所述第一层板和所述第二层板之间;
9.根据权利要求7所述的电动箱体门结构,其特征在于,所述驱动机构还包括从动杆,当所述驱动件安装于所述第一层板时,所述从动杆一端与所述箱体门转动连接,另一端与所述第一层板转动连接;当所述驱动件安装于所述第二层板时,所述从动杆一端与所述箱体门转动连接,另一端与所述第二层板转动连接。
10.一种机器人,其特征在于,包括如权利要求1-9中任一项所述的电动箱体门结构。
技术总结
本技术涉及机器人领域,公开一种电动箱体门结构及机器人。一种电动箱体门结构包括:箱体主支架、箱体门以及安装于箱体主支架的驱动机构;驱动机构包括驱动件、门轴、驱动杆和位置检测组件;门轴转动安装于箱体主支架,驱动件与门轴传动连接;驱动杆一端与门轴相对固定,另一端与箱体门转动连接;驱动件用于驱动门轴转动,并通过与门轴连接的驱动杆带动箱体门转动;位置检测组件用于检测门轴的转动角度。电动箱体门结构减少了多个部件关联的公差累积对箱体门的组装影响,减小了位置误差,更利于精准控制开关门,使关门更严,减小门缝产生。
技术研发人员:李宇诚,刘一丁
受保护的技术使用者:北京猎户星空科技有限公司
技术研发日:20230728
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!