一种人工智能机器人用减震防撞保护装置
本技术涉及防撞保护,尤其涉及一种人工智能机器人用减震防撞保护装置。
背景技术:
1、现在在商场或一些公共场所里都会安排有智能机器人,这些智能机器人可以在场所内进行移动并且能和人们进行简单的问答,告诉人们一些场所信息,这些智能机器人在移动的过程中可能会遇到台阶而倒地,造成机器人顶部人机交互屏幕损伤和机体外壳损伤,为此,我们提出一种人工智能机器人用减震防撞保护装置,来对智能机器人起到保护作用。
技术实现思路
1、本实用新型提供了一种人工智能机器人用减震防撞保护装置,可在智能机器人本体摔倒时对智能机器人本体顶部的人机交互屏幕起到保护作用,避免屏幕受到损伤,同时可对智能机器人本体外壳起到减震防撞的作用,避免机体外壳损伤。
2、为了实现上述目的,本实用新型采用了如下技术方案:
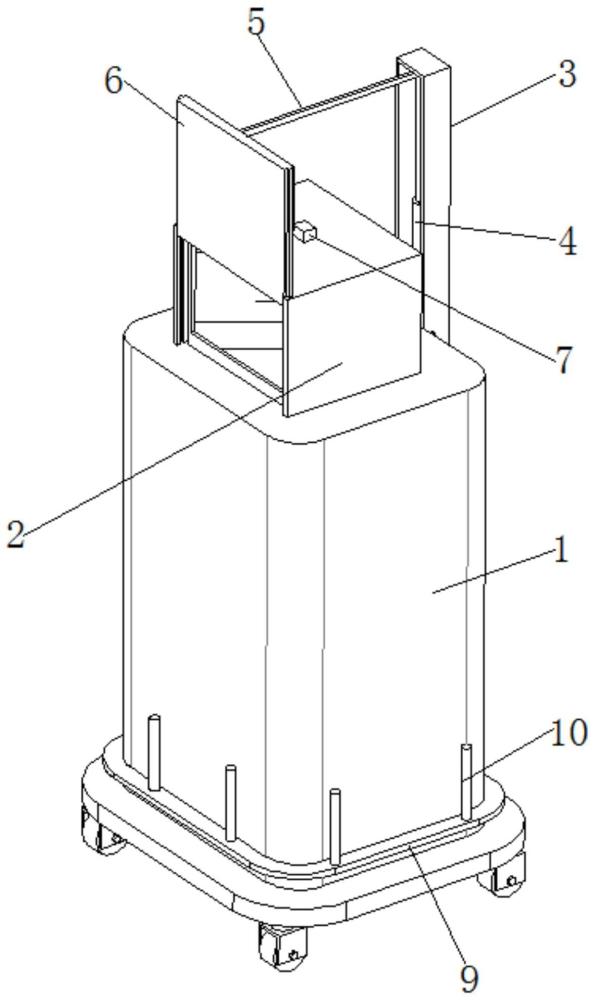
3、一种人工智能机器人用减震防撞保护装置,包括智能机器人本体、缓冲减震胶套和上环,所述智能机器人本体顶部外壁固定有防护壳,所述智能机器人本体一侧外壁安装有竖箱,所述竖箱底部内壁固定有电动推杆,所述电动推杆活塞杆一侧外壁固定有连接杆,所述连接杆一端固定有封板,所述防护壳顶部外壁安装有平衡传感器,所述防护壳一侧外壁安装有控制器,所述智能机器人本体外壁固定有下环,所述下环顶部外壁固定有等距离分布的下杆,所述缓冲减震胶套上下两侧外壁均开有等距离分布的定位孔。
4、通过上述方案,可将缓冲减震胶套套设在智能机器人本体上,并使得下杆插入缓冲减震胶套底部的定位孔上,再将上环套在智能机器人本体上固定,这时上杆插入缓冲减震胶套顶部的定位孔上,当智能机器人本体在移动的过程中可能会遇到台阶而倒地,当智能机器人本体歪斜还未倒地时,智能机器人本体上的平衡传感器检测到智能机器人本体失去平衡,并将信号传递给控制器,控制器自动控制电动推杆活塞杆收缩,进而带动封板下降,使得封板将防护壳开口处封堵,对智能机器人本体顶部的人机交互屏幕起到保护作用,避免屏幕受到损伤,同时通过设置的缓冲减震胶套可对智能机器人本体外壳起到减震防撞的作用,避免机体外壳损伤。
5、优选的,所述竖箱两侧外壁均开有第一螺纹通孔。
6、通过上述方案,方便对上环进行固定。
7、优选的,所述上环底部外壁固定有等距离分布的上杆,所述上环两侧外壁均开有第二螺纹通孔。
8、通过上述方案,上环套在智能机器人本体上,第二螺纹通孔与第一螺纹通孔对齐,可往第二螺纹通孔内螺入螺栓,将上环固定在竖箱上。
9、优选的,所述第一螺纹通孔与第二螺纹通孔孔径相适配,所述第二螺纹通孔配有相适配的螺栓。
10、通过上述方案,方便第一螺纹通孔与第二螺纹通孔向第二螺纹通孔内螺入螺栓。
11、优选的,所述防护壳两侧内壁均开有导向槽,所述封板的两端分别位于两个导向槽内。
12、通过上述方案,封板在上下运动的过程中更加稳定。
13、优选的,所述上杆、下杆和定位孔三者相适配。
14、通过上述方案,上杆和下杆均可插入定位孔内。
15、优选的,所述平衡传感器和电动推杆均通过信号线与控制器连接,所述控制器通过电源线连接有外部电源。
16、通过上述方案,控制器可对平衡传感器和电动推杆进行控制。
17、本实用新型的有益效果为:
18、当智能机器人本体歪斜还未倒地时,智能机器人本体上的平衡传感器检测到智能机器人本体失去平衡,电动推杆会自动活塞杆收缩,进而带动封板下降,使得封板将防护壳开口处封堵,对智能机器人本体顶部的人机交互屏幕起到保护作用,避免屏幕受到损伤,同时通过设置的缓冲减震胶套可对智能机器人本体外壳起到减震防撞的作用,避免机体外壳损伤。
技术特征:
1.一种人工智能机器人用减震防撞保护装置,包括智能机器人本体(1)、缓冲减震胶套(11)和上环(13),其特征在于,所述智能机器人本体(1)顶部外壁固定有防护壳(2),所述智能机器人本体(1)一侧外壁安装有竖箱(3),所述竖箱(3)底部内壁固定有电动推杆(4),所述电动推杆(4)活塞杆一侧外壁固定有连接杆(5),所述连接杆(5)一端固定有封板(6),所述防护壳(2)顶部外壁安装有平衡传感器(7),所述防护壳(2)一侧外壁安装有控制器(8),所述智能机器人本体(1)外壁固定有下环(9),所述下环(9)顶部外壁固定有等距离分布的下杆(10),所述缓冲减震胶套(11)上下两侧外壁均开有等距离分布的定位孔(12)。
2.根据权利要求1所述的一种人工智能机器人用减震防撞保护装置,其特征在于,所述竖箱(3)两侧外壁均开有第一螺纹通孔(16)。
3.根据权利要求2所述的一种人工智能机器人用减震防撞保护装置,其特征在于,所述上环(13)底部外壁固定有等距离分布的上杆(15),所述上环(13)两侧外壁均开有第二螺纹通孔(14)。
4.根据权利要求3所述的一种人工智能机器人用减震防撞保护装置,其特征在于,所述第一螺纹通孔(16)与第二螺纹通孔(14)孔径相适配,所述第二螺纹通孔(14)配有相适配的螺栓。
5.根据权利要求1所述的一种人工智能机器人用减震防撞保护装置,其特征在于,所述防护壳(2)两侧内壁均开有导向槽,所述封板(6)的两端分别位于两个导向槽内。
6.根据权利要求3所述的一种人工智能机器人用减震防撞保护装置,其特征在于,所述上杆(15)、下杆(10)和定位孔(12)三者相适配。
7.根据权利要求1所述的一种人工智能机器人用减震防撞保护装置,其特征在于,所述平衡传感器(7)和电动推杆(4)均通过信号线与控制器(8)连接,所述控制器(8)通过电源线连接有外部电源。
技术总结
本技术公开了一种人工智能机器人用减震防撞保护装置,涉及防撞保护技术领域,包括智能机器人本体、缓冲减震胶套和上环,所述智能机器人本体顶部外壁固定有防护壳,所述智能机器人本体一侧外壁安装有竖箱,所述竖箱底部内壁固定有电动推杆,所述电动推杆活塞杆一侧外壁固定有连接杆。本技术当智能机器人本体歪斜还未倒地时,智能机器人本体上的平衡传感器检测到智能机器人本体失去平衡,电动推杆会自动活塞杆收缩,进而带动封板下降,使得封板将防护壳开口处封堵,对智能机器人本体顶部的人机交互屏幕起到保护作用,避免屏幕受到损伤,同时通过设置的缓冲减震胶套可对智能机器人本体外壳起到减震防撞的作用,避免机体外壳损伤。
技术研发人员:彭金银,朱香瑾
受保护的技术使用者:海南科技职业大学
技术研发日:20230807
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!