一种连杆铰接臂式机器人的制作方法
本技术涉及物料搬运机械,特别是涉及一种连杆铰接臂式机器人。
背景技术:
1、包装行业中,物料搬运的应用场景较多,如拣选,上下料,装箱,拆箱/垛等。已实现的自动化场景中,搬运动力有坐标轴,工业机器人及并联机器人等。如公开号为cn86108357a的实用新型专利中公开的用于焊接设备的焊丝给进运送装置和公告号为cn217707653u中公开的一种智能搬运机器人等,众多现有技术中的搬运机器人结构一般过于复杂,制造成本较高,占用空间大,实用性差,使用不方便,因此亟需一种连杆铰接臂式机器人对上述问题进行改善。
技术实现思路
1、为解决上述技术问题,本实用新型提供一种将夹具安装至支撑机构上,通过夹具将物料夹具,之后通过驱动机构为支撑机构提供动力,同时通过联动机构对支撑机构的动作进行限制,使支撑机构将物料搬运至指定位置,从而提高设备的实用性的一种连杆铰接臂式机器人。
2、本实用新型的一种连杆铰接臂式机器人,包括驱动机构;还包括固定机构、支撑机构和联动机构,固定机构安装于工作面上,支撑机构安装于固定机构上,驱动机构和联动机构均安装于支撑机构上;
3、所述固定机构对支撑机构进行支撑,驱动机构为支撑机构提供动力,联动机构对支撑机构的动作进行限制,支撑机构对物料进行搬运;
4、将夹具安装至支撑机构上,通过夹具将物料夹具,之后通过驱动机构为支撑机构提供动力,同时通过联动机构对支撑机构的动作进行限制,使支撑机构将物料搬运至指定位置,从而提高设备的实用性。
5、优选的,所述固定机构包括固定座,固定座固定安装于工作面上,所述支撑机构安装于固定座上;通过固定座对支撑机构进行支撑,从而提高设备的稳定性。
6、优选的,所述支撑机构包括第一大臂组件、第一转轴组件、第二大臂组件、第二转轴组件、第三转轴组件、小臂组件和限位机构,第一大臂组件的一端通过第一转轴组件转动安装于固定座上,第二大臂组件的一端通过第二转轴组件转动安装于第一大臂组件的另一端,小臂组件的一端通过第三转轴组件转动安装于第二大臂组件的另一端,限位机构安装于小臂组件的另一端;通过第一转轴组件旋转对第一大臂组件另一端的位置进行调节,通过第二转轴组件转动对第二大臂组件另一端的位置进行调节,从而调节限位机构的位置,提高设备的实用性。
7、优选的,所述限位机构包括法兰板,法兰板安装于小臂组件的另一端。
8、优选的,所述联动机构包括铰接角板、第一连杆组件和第二连杆组件,铰接角板转动安装于第二转轴组件上,第一连杆组件的一端与固定座铰接,第一连杆组件的另一端与铰接角板的右端铰接,第二连杆组件的一端与铰接角板的左端铰接,第二连杆组件的另一端与小臂组件铰接;通过第一转轴组件和第二转轴组件对法兰板的位置进行调整过程中,通过小臂组件、法兰板和铰接角板配合,使法兰板保持与固定座垂直,从而提高设备的实用性。
9、优选的,所述驱动机构包括两组安装座、第一伺服电机和第二伺服电机,两组安装座分别固定安装于固定座和第一大臂组件上,第一伺服电机和第二伺服电机分别固定安装于两组安装座上,并且第一伺服电机对第一转轴组件进行驱动,第二伺服电机对第二转轴组件进行驱动;通过第一伺服电机驱动第一转轴组件带动第一大臂组件旋转,通过第二伺服电机驱动第二转轴组件带动第二大臂组件旋转,对法兰板的位置进行调节,从而提高设备的实用性。
10、优选的,所述第一大臂组件和第二大臂组件均为镂空结构;使第一大臂组件和第二大臂组件的重量减轻,从而提高设备的实用性。
11、优选的,所述第一大臂组件中部和第二大臂组件中部均设置有加强杆。
12、优选的,所述第一转轴组件、第二转轴组件和第三转轴组件上均设置有轴承。
13、优选的,所述铰接角板为镂空结构。
14、与现有技术相比本实用新型的有益效果:
15、1、结构组成简单,三轴两自由度,实现搬运动作简捷,高效;
16、2、结构紧凑,设计精巧,物料搬运过程中通过联动结构使法兰板保持与固定座垂直,减少对物料的倾斜和晃动;
17、3、成本较低,配件普通大众化,方便制造或采买。
技术特征:
1.一种连杆铰接臂式机器人,包括驱动机构;其特征在于,还包括固定机构、支撑机构和联动机构,固定机构安装于工作面上,支撑机构安装于固定机构上,驱动机构和联动机构均安装于支撑机构上;
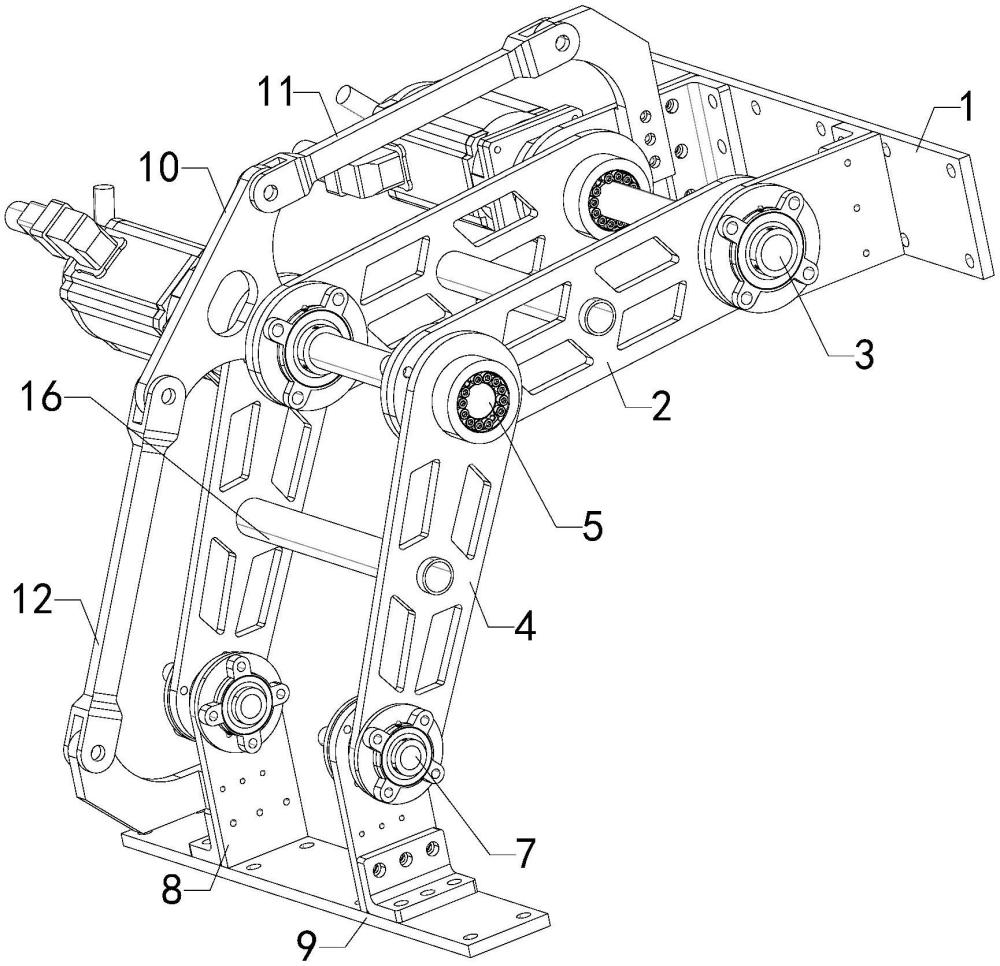
2.如权利要求1所述的一种连杆铰接臂式机器人,其特征在于,所述固定机构包括固定座(1),固定座(1)固定安装于工作面上,所述支撑机构安装于固定座(1)上。
3.如权利要求2所述的一种连杆铰接臂式机器人,其特征在于,所述支撑机构包括第一大臂组件(2)、第一转轴组件(3)、第二大臂组件(4)、第二转轴组件(5)、第三转轴组件(7)、小臂组件(8)和限位机构,第一大臂组件(2)的一端通过第一转轴组件(3)转动安装于固定座(1)上,第二大臂组件(4)的一端通过第二转轴组件(5)转动安装于第一大臂组件(2)的另一端,小臂组件(8)的一端通过第三转轴组件(7)转动安装于第二大臂组件(4)的另一端,限位机构安装于小臂组件(8)的另一端。
4.如权利要求3所述的一种连杆铰接臂式机器人,其特征在于,所述限位机构包括法兰板(9),法兰板(9)安装于小臂组件(8)的另一端。
5.如权利要求3所述的一种连杆铰接臂式机器人,其特征在于,所述联动机构包括铰接角板(10)、第一连杆组件(11)和第二连杆组件(12),铰接角板(10)转动安装于第二转轴组件(5)上,第一连杆组件(11)的一端与固定座(1)铰接,第一连杆组件(11)的另一端与铰接角板(10)的右端铰接,第二连杆组件(12)的一端与铰接角板(10)的左端铰接,第二连杆组件(12)的另一端与小臂组件(8)铰接。
6.如权利要求3所述的一种连杆铰接臂式机器人,其特征在于,所述驱动机构包括两组安装座(13)、第一伺服电机(14)和第二伺服电机(15),两组安装座(13)分别固定安装于固定座(1)和第一大臂组件(2)上,第一伺服电机(14)和第二伺服电机(15)分别固定安装于两组安装座(13)上,并且第一伺服电机(14)对第一转轴组件(3)进行驱动,第二伺服电机(15)对第二转轴组件(5)进行驱动。
7.如权利要求3所述的一种连杆铰接臂式机器人,其特征在于,所述第一大臂组件(2)和第二大臂组件(4)均为镂空结构。
8.如权利要求3所述的一种连杆铰接臂式机器人,其特征在于,所述第一大臂组件(2)中部和第二大臂组件(4)中部均设置有加强杆(16)。
9.如权利要求3所述的一种连杆铰接臂式机器人,其特征在于,所述第一转轴组件(3)、第二转轴组件(5)和第三转轴组件(7)上均设置有轴承。
10.如权利要求5所述的一种连杆铰接臂式机器人,其特征在于,所述铰接角板(10)为镂空结构。
技术总结
本技术涉及物料搬运机械技术领域,特别是涉及一种连杆铰接臂式机器人,其将夹具安装至支撑机构上,通过夹具将物料夹具,之后通过驱动机构为支撑机构提供动力,同时通过联动机构对支撑机构的动作进行限制,使支撑机构将物料搬运至指定位置,从而提高设备的实用性;包括驱动机构;还包括固定机构、支撑机构和联动机构,固定机构安装于工作面上,支撑机构安装于固定机构上,驱动机构和联动机构均安装于支撑机构上;所述固定机构对支撑机构进行支撑,驱动机构为支撑机构提供动力,联动机构对支撑机构的动作进行限制,支撑机构对物料进行搬运。
技术研发人员:周德强,高星,张树房,徐丰娟,李欣,张燕磊,王俊石
受保护的技术使用者:华晟(青岛)智能装备科技有限公司
技术研发日:20230807
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!