一种智能语音机器人
本技术涉及智能机器人,具体为一种智能语音机器人。
背景技术:
1、随着科技的进步发展,机器人发展越来越快,尤其智能机器人上都设有语音交互功能,语音交互平台上都设有声音传感器,声音传感器可让机器人听到同时机器人可根据使用者的人声进行简单识别的重复,或者进行智能识别并进行对话反馈以作为陪伴娱乐、游戏、办公等用途。
2、目前常见的智能语音机器人在使用时通常直接放置在台面上,此种类型的机器人不具备行走能力,只能在单一位置进行使用,如cn201821986476.7公开的智能语音机器人,其中在机器人内部设置各种智能模块,可实现人机交互,但是其并不具备行走能力,在使用时需要手动移动或者携带,而为了使机器人或者行走能力,目前常见技术通常是在机器人上设置用于行走的轮体,但是此种常规行走方式缺乏趣味性,此外,常见的智能语音机器人通常设置有充电口,需要人工手动接线进行充电,使用仍具有一定的局限性,为此我们提出一种智能语音机器人以解决上述问题。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种智能语音机器人,解决了上述背景技术中提出的问题。
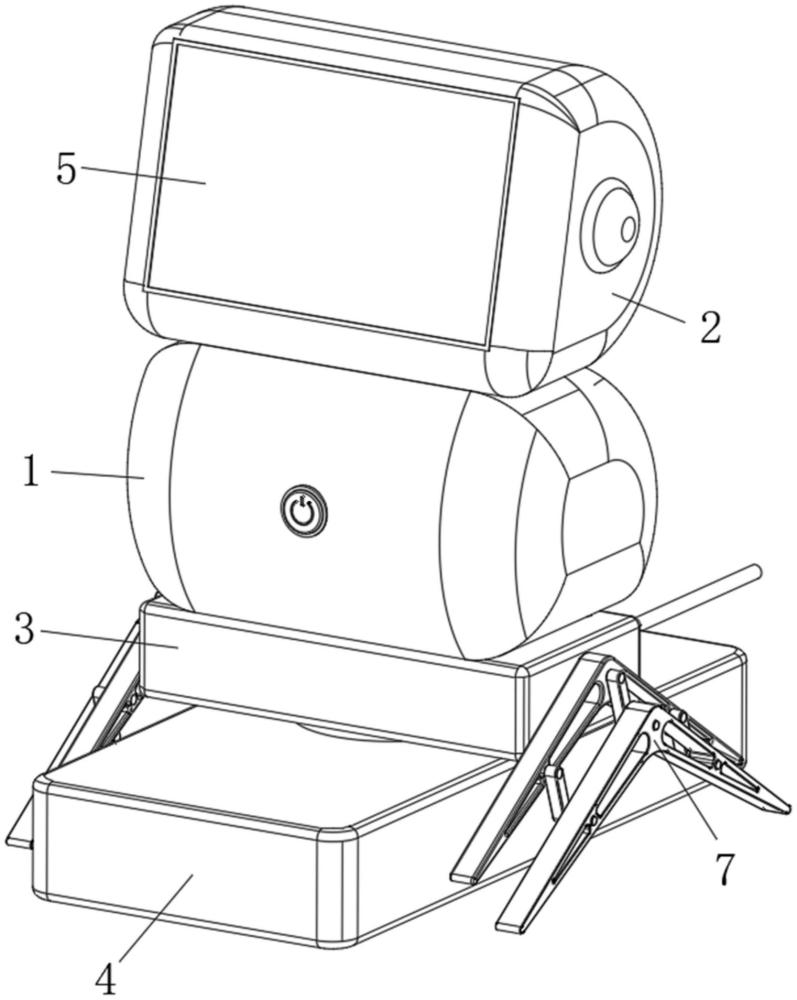
2、为实现以上目的,本实用新型通过以下技术方案予以实现:一种智能语音机器人,包括固定连接的机器人身部、机器人头部,所述机器人身部的正面设置有总控开关,所述机器人头部的正面设置有显示屏,所述机器人身部的底部固定安装有机器人足部,且机器人足部的左右两侧均设置有移动组件,所述移动组件包括减速电机、固定足、活动足、驱动臂、从动臂,所述减速电机固定安装于机器人足部的内部,所述固定足、活动足位于机器人足部的外侧,所述机器人足部的底部放置有无线充电底座,所述机器人足部的内部固定安装有与无线充电底座配合的无线充电模块,所述机器人足部的底部通过螺钉固定安装有封板。
3、优选的,所述固定足固定安装于机器人足部的侧面,所述活动足活动安装于固定足的外侧,所述固定足、活动足均为倒置的“v”字形。
4、优选的,所述减速电机的输出轴上固定套装有位于机器人足部外部的驱动臂,所述固定足活动套装于减速电机的输出轴外部,所述驱动臂的一端与活动足中部活动连接。
5、优选的,所述固定足靠近活动足的一侧活动安装有两组从动臂,且从动臂的一端与活动足活动连接。
6、优选的,两组所述从动臂镜像分布于驱动臂的两侧,所述驱动臂与从动臂均为“z”字形。
7、优选的,所述固定足、活动足的端部均套装有防滑橡胶套,且防滑橡胶套的壁厚为0.3-0.8mm。
8、优选的,所述机器人身部的内部设置有处理器模块、语音识别模块、语音采集模块、电池、扬声器、信号传输模块、gps模块、存储模块、数字编码模块、录入端口模块,所述无线充电模块与电池电性连接。
9、本实用新型提供了一种智能语音机器人,具备以下有益效果:
10、1、该智能语音机器人,通过在该机器人底部设置机器人足部,并在机器人足部两侧均设置由减速电机、固定足、活动足等结构组成的移动组件,通过两侧的减速电机带动驱动臂转动,并与固定足配合,可带动该机器人逐步移动,且通过两侧的固定足、活动足进行八足移动,更加富有趣味性。
11、2、该智能语音机器人,通过在该机器人底部设置无线充电底座,并在无线充电底座内部设置无线充电模块,可对该机器人实现无线充电,不需手动进行接线操作,更加智能,同时通过该机器人中的gps模块可记忆无线充电底座的放置位置,通过语音控制该机器人可通过移动组件自动移动至无线充电底座进行充电,进一步提高智能化程度。
技术特征:
1.一种智能语音机器人,包括固定连接的机器人身部(1)、机器人头部(2),所述机器人身部(1)的正面设置有总控开关(6),所述机器人头部(2)的正面设置有显示屏(5),其特征在于:所述机器人身部(1)的底部固定安装有机器人足部(3),且机器人足部(3)的左右两侧均设置有移动组件(7),所述移动组件(7)包括减速电机(71)、固定足(72)、活动足(73)、驱动臂(74)、从动臂(75),所述减速电机(71)固定安装于机器人足部(3)的内部,所述固定足(72)、活动足(73)位于机器人足部(3)的外侧,所述机器人足部(3)的底部放置有无线充电底座(4),所述机器人足部(3)的内部固定安装有与无线充电底座(4)配合的无线充电模块(9),所述机器人足部(3)的底部通过螺钉固定安装有封板(8)。
2.根据权利要求1所述的一种智能语音机器人,其特征在于:所述固定足(72)固定安装于机器人足部(3)的侧面,所述活动足(73)活动安装于固定足(72)的外侧,所述固定足(72)、活动足(73)均为倒置的“v”字形。
3.根据权利要求2所述的一种智能语音机器人,其特征在于:所述减速电机(71)的输出轴上固定套装有位于机器人足部(3)外部的驱动臂(74),所述固定足(72)活动套装于减速电机(71)的输出轴外部,所述驱动臂(74)的一端与活动足(73)中部活动连接。
4.根据权利要求3所述的一种智能语音机器人,其特征在于:所述固定足(72)靠近活动足(73)的一侧活动安装有两组从动臂(75),且从动臂(75)的一端与活动足(73)活动连接。
5.根据权利要求4所述的一种智能语音机器人,其特征在于:两组所述从动臂(75)镜像分布于驱动臂(74)的两侧,所述驱动臂(74)与从动臂(75)均为“z”字形。
6.根据权利要求5所述的一种智能语音机器人,其特征在于:所述固定足(72)、活动足(73)的端部均套装有防滑橡胶套(76),且防滑橡胶套(76)的壁厚为0.3-0.8mm。
7.根据权利要求1所述的一种智能语音机器人,其特征在于:所述机器人身部(1)的内部设置有处理器模块、语音识别模块、语音采集模块、电池、扬声器、信号传输模块、gps模块、存储模块、数字编码模块、录入端口模块,所述无线充电模块(9)与电池电性连接。
技术总结
本技术涉及智能机器人技术领域,具体为一种智能语音机器人,包括固定连接的机器人身部、机器人头部,所述机器人身部的正面设置有总控开关,所述机器人头部的正面设置有显示屏,所述机器人身部的底部固定安装有机器人足部,且机器人足部的左右两侧均设置有移动组件,所述移动组件包括减速电机、固定足、活动足、驱动臂、从动臂。该智能语音机器人,通过在该机器人底部设置机器人足部,并在机器人足部两侧均设置由减速电机、固定足、活动足等结构组成的移动组件,通过两侧的减速电机带动驱动臂转动,并与固定足配合,可带动该机器人逐步移动,且通过两侧的固定足、活动足进行八足移动,更加富有趣味性。
技术研发人员:胡欣欣,何焕然,张程午,罗峰,彭树尧
受保护的技术使用者:安徽水利水电职业技术学院
技术研发日:20230810
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!