一种底盘结构及机器人的制作方法
本技术涉及机器人,尤其涉及一种底盘结构及机器人。
背景技术:
1、随着机器人的发展和应用范围的不断扩大,四足机器人如今已经被广泛应用于不同领域。目前,现有的机器人壳体设计通常采用整体包裹的结构形式进行设计,其结构主要是由两个一体成型的壳体组装形成机器人机身;然而,这种传统的机器人机身整体包裹式的结构设计,其内部的功能零部件往往采用堆叠式的安装模式,这种装模式对各功能零部件的拆装过程中步骤繁琐,不便于操作,不利于后期维护,拆装维护成本高;并且整体包裹式的结构会进一步加重机器人本体的重量,四足机器人本体过重时,不仅会影响其运动的灵活性和速度,而且还会增加机器人在工作过程中的能耗和维护成本。
技术实现思路
1、本实用新型的目的在于克服现有技术中的不足,提供一种重量轻、抗扭转度强、安装维护方便的底盘结构及机器人。
2、为达到上述目的,本实用新型是采用下述技术方案实现的:
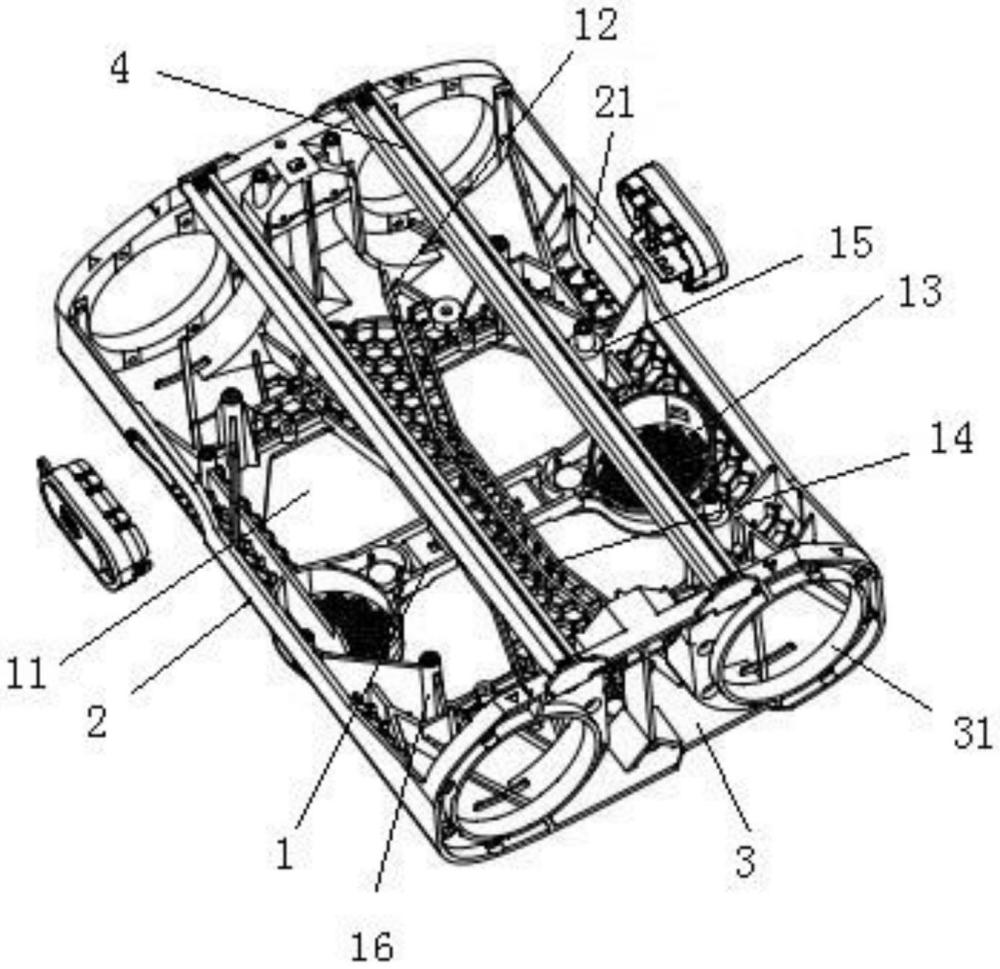
3、本实用新型提供一种底盘结构,包括:
4、底板;
5、至少一对相对设置的侧板,所述侧板与所述底板连接;
6、至少一对相对设置的端板,所述端板与所述底板连接,任一侧板的两端与分别连接两个所述端板,所述端板用于安装运动部件;
7、其中,所有所述侧板、所有端板和底板共同围合为至少一侧开口的容纳空腔;所述底板包括若干间隔设置的减重部和加强部,所述加强部用于增强所述底板的抗扭转度。
8、可选地,上述的底盘结构中,所述加强部包括加强筋,所述加强筋的截面尺寸由所述端板向远离所述运动部件的延伸方向逐渐减小。
9、可选地,上述的底盘结构中,所述加强筋上还设有若干减重槽,和/或减重孔。
10、可选地,上述的底盘结构中,所述加强筋包括轴线加强筋和两个侧边加强筋,所述侧边加强筋与相邻的所述侧板连接,所述轴线加强筋设置在两个侧边加强筋之间。
11、可选地,上述的底盘结构中,所述减重部包括由外向内凹陷的通孔,所述减重部设置在侧边加强筋和轴线加强筋之间。
12、可选地,上述的底盘结构中,所述底板上还包括第一安装部,所述第一安装部用于安装音响;
13、和/或,
14、所述底板上还包括第二安装部,所述第二安装部用于安装电池。
15、可选地,上述的底盘结构中,所述侧板上包括至少一个第三安装部,所述第三安装部用于安装人机交互面板。
16、可选地,上述的底盘结构中,还包括连接结构,所述连接结构的两端连接相对设置的两个端板;
17、或,
18、还包括连接结构,所述连接结构的两端连接相对设置的两个端板,所述连接结构上设有若干连接部,所述连接部适于安装雷达。
19、可选地,上述的底盘结构中,所述侧板与所述底板之间呈圆弧形过渡。
20、本实用新型提供还提供一种机器人,包括如上所述的底盘结构。
21、与现有技术相比,本实用新型所达到的有益效果是:
22、1.本实用新型提供的底盘结构,通过侧板、端板和底板共同围合而成的具有至少一侧开口的底盘结构,为机器人上面的各功能零部件提供一个开放的安装空间,方便机器人的组装和维护,显著降低安装和维护成本;通过在底板上设置减重部有效降低了机器人的重量,实现了底盘结构的轻量化设计;此外,通过设置用于增强所述底板的抗扭转度的加强部,进一步提高了底盘结构的可负载能力,避免在实际运动过程中,由于驱动结构扭转发生底盘刚性不足而导致底盘坏损的问题。
23、2.本实用新型提供的底盘结构,通过减重部中的轴线加强筋和侧边加强筋的位置布置,进一步提高底盘结构的稳定性,极大满足了机器人运动、支持强度和刚度的要求;实现降低机器人重量的同时,提高其运动性能、效率、续航能力。
技术特征:
1.一种底盘结构,其特征在于,包括:
2.根据权利要求1所述的底盘结构,其特征在于,所述加强部(12)包括加强筋,所述加强筋的截面尺寸由所述端板向远离所述运动部件的延伸方向逐渐减小。
3.根据权利要求2所述的底盘结构,其特征在于,所述加强筋上还设有若干减重槽,和/或减重孔。
4.根据权利要求2所述的底盘结构,其特征在于,所述加强筋包括轴线加强筋(121)和两个侧边加强筋(122),所述侧边加强筋(122)与相邻的所述侧板(2)连接,所述轴线加强筋(121)设置在两个侧边加强筋(122)之间。
5.根据权利要求4所述的底盘结构,其特征在于,所述减重部(11)包括由外向内凹陷的通孔,所述减重部(11)设置在侧边加强筋(122)和轴线加强筋(121)之间。
6.根据权利要求1至5任一项所述的底盘结构,其特征在于,
7.根据权利要求1至5任一项所述的底盘结构,其特征在于,
8.根据权利要求1至5任一项所述的底盘结构,其特征在于,
9.根据权利要求1至5任一项所述的底盘结构,其特征在于,
10.一种机器人,包括权利要求1-9中任一项所述的底盘结构。
技术总结
本技术公开了一种底盘结构及机器人,其中,底盘结构包括底板;至少一对相对设置的侧板,所述侧板与所述底板连接;至少一对相对设置的端板,所述端板与所述底板连接,任一侧板的两端与分别连接两个所述端板,所述端板用于安装运动部件;其中,所有所述侧板、所有端板和底板共同围合为至少一侧开口的容纳空腔;所述底板包括若干间隔设置的减重部和加强部,所述加强部用于增强所述底板的抗扭转度。本技术能够同时解决安装维护不方便和机器人本体过重的问题,进一步提高其运动性能、效率和续航,降低安装维护成本。
技术研发人员:请求不公布姓名,请求不公布姓名,请求不公布姓名
受保护的技术使用者:南京蔚蓝智能科技有限公司
技术研发日:20230822
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!