一种机器人电机维修用便于固定电机的工作台的制作方法
本技术涉及机器人电机维修领域,更具体的说是一种机器人电机维修用便于固定电机的工作台。
背景技术:
1、机器人在许多人眼中是科技化、智能化、高精度化的代表产品之一,机器人常用的电机主要包含三种类型:普通的直流电机、伺服电机、步进电机,对小车进行运动驱动时,一般选择直流电机或步进电机都能够满足要求,而伺服电机一般用在机械手上,用来获得准确的转角以及轨迹规划等更加精密严谨的数据。对于速度、位置等控制方面,采用步进电机会使控制过程变得简单,而机器人所使用的电机发生故障时,需要对电机进行固定从而维修,但是现有技术中缺少在固定维修机器人电机时随意转动电机的工作台,因此提出本申请。
技术实现思路
1、本实用新型的目的是提供一种机器人电机维修用便于固定电机的工作台,可以在固定维修机器人电机时随意转动电机。
2、本实用新型的目的通过以下技术方案来实现:一种机器人电机维修用便于固定电机的工作台,包括半圆架和固定连接在半圆架外侧的限位环,所述半圆架中部的左右两侧分别滑动连接有一个横移架,每个所述横移架的内侧分别固定连接有一个夹持架,所述半圆架依靠限位环转动连接在翻转框内侧,所述半圆架的左侧固定连接有把手。
3、两个所述横移架镜像设置。
4、每个所述夹持架的底部分别固定连接有一个横板。
5、两个所述横移架的底部分别固定连接在双向推杆的两个活动端上,所述双向推杆的固定端固定连接在所述半圆架的底部。
6、所述翻转框的底部固定连接在旋转架上,所述旋转架的底部固定连接在底框上。
7、所述翻转框的外侧沿圆周方向均匀设有多个定位孔。
技术特征:
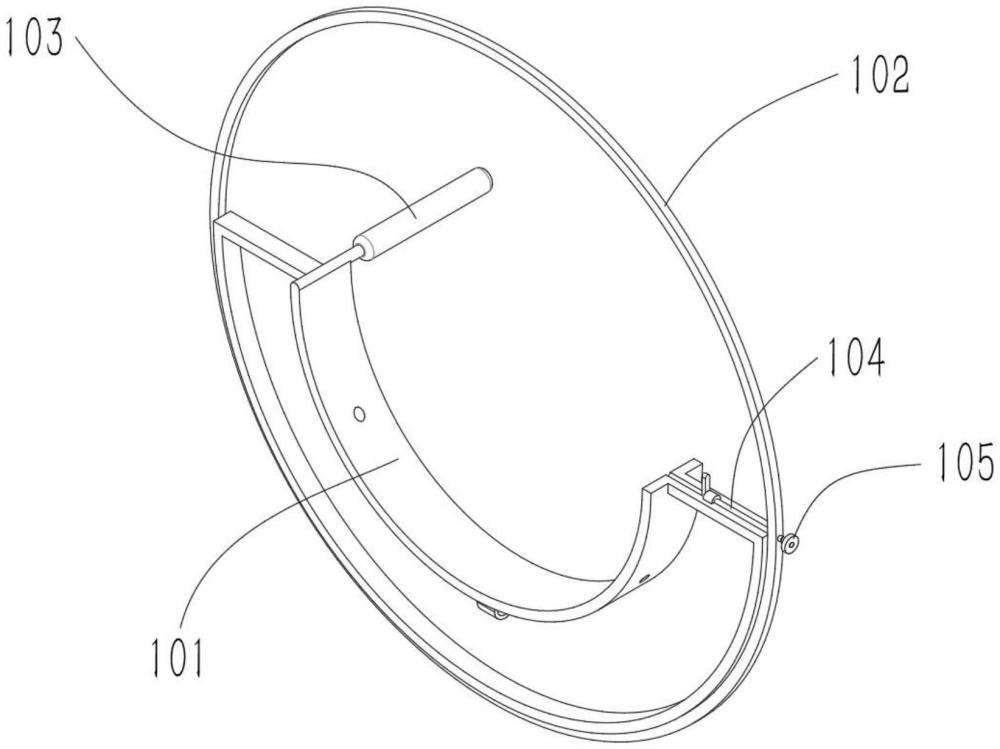
1.一种机器人电机维修用便于固定电机的工作台,包括半圆架(101)和固定连接在半圆架(101)外侧的限位环(102),其特征在于:所述半圆架(101)中部的左右两侧分别滑动连接有一个横移架(201),每个所述横移架(201)的内侧分别固定连接有一个夹持架(202),所述半圆架(101)依靠限位环(102)转动连接在翻转框(302)内侧,所述半圆架(101)的左侧固定连接有把手(103)。
2.根据权利要求1所述的工作台,其特征在于:两个所述横移架(201)镜像设置。
3.根据权利要求1所述的工作台,其特征在于:每个所述夹持架(202)的底部分别固定连接有一个横板。
4.根据权利要求1所述的工作台,其特征在于:两个所述横移架(201)的底部分别固定连接在双向推杆(203)的两个活动端上,所述双向推杆(203)的固定端固定连接在所述半圆架(101)的底部。
5.根据权利要求1所述的工作台,其特征在于:所述翻转框(302)的底部固定连接在旋转架(301)上,所述旋转架(301)的底部固定连接在底框(303)上。
6.根据权利要求5所述的工作台,其特征在于:所述翻转框(302)的外侧沿圆周方向均匀设有多个定位孔。
7.根据权利要求6所述的工作台,其特征在于:所述半圆架(101)中部的右侧滑动连接有定位杆(104),所述定位杆(104)的右侧穿过任意一个位于所述翻转框(302)上的定位孔设置。
8.根据权利要求7所述的工作台,其特征在于:所述定位杆(104)的右侧设有螺纹,所述定位杆(104)的右侧通过螺纹固定连接有螺帽(105)。
9.根据权利要求7所述的工作台,其特征在于:所述半圆架(101)的左侧固定连接有把手。
10.根据权利要求9所述的工作台,其特征在于:所述底框(303)的底部转动连接在工作架(401)的中部。
技术总结
本技术涉及机器人电机维修领域,更具体的说是一种机器人电机维修用便于固定电机的工作台。本技术的目的是提供一种机器人电机维修用便于固定电机的工作台,可以在固定维修机器人电机时随意转动电机。本技术的目的通过以下技术方案来实现:一种机器人电机维修用便于固定电机的工作台,包括半圆架和固定连接在半圆架外侧的限位环,所述半圆架中部的左右两侧分别滑动连接有一个横移架,每个所述横移架的内侧分别固定连接有一个夹持架,所述半圆架依靠限位环转动连接在翻转框内侧,所述半圆架的左侧固定连接有把手。
技术研发人员:崔治国
受保护的技术使用者:博然(天津)机器人有限公司
技术研发日:20230825
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!