一种用于打磨的SCARA机器人的制作方法
本技术涉及一种用于打磨的scara机器人,属于机器人领域。
背景技术:
1、scara机器人是一种圆柱坐标型的特殊类型的工业机器人,也称作水平关节机器人,目前以用于打磨行业中的scara机器人的减速机选型多为谐波减速机,其缺点是使用寿命短、且耐冲击性能较差;同时现有技术中的scara机器人中缺少相应的零点调节结构,因此难以保证其运动精度。有鉴于此,在申请号为202320053836 .2的专利文献中公开了一种scara机器人,上述现有技术中的减速器为谐波减速器。
技术实现思路
1、本实用新型的目的在于克服现有技术中存在的上述不足,而提供一种结构设计合理的用于打磨的scara机器人。
2、本实用新型解决上述问题所采用的技术方案是:该用于打磨的scara机器人,包括支撑架和支撑座,所述支撑座设置在支撑架上,其结构特点在于:还包括关节座、升降座、以及用于驱动关节座摆动的关节驱动机构和用于驱动刀具在升降座上移动的升降驱动机构,所述关节座设置在支撑座上,所述升降座设置在关节座上,所述关节驱动机构与关节座配合,所述升降驱动机构与升降座配合。通过关节驱动机构驱动关节座在支撑座上摆动,通过升降驱动机构驱动刀具在升降座上移动可实现对刀具位置的调整,其中关节座、关节驱动机构的数量可依据实际情况需要而定。
3、进一步地,所述关节座包括第一关节座和第二关节座,所述第一关节座设置在支撑座上,所述第二关节座设置在第一关节座上,所述升降座设置在第二关节座上。
4、进一步地,所述关节驱动机构包括用于驱动第一关节座摆动的第一关节驱动机构和用于驱动第二关节座摆动的第二关节驱动机构,所述第一关节座通过第一关节驱动机构设置在支撑座上,所述第二关节座通过第二关节驱动机构设置在第一关节座上。
5、进一步地,所述第一关节驱动机构包括第一伺服电机和第一减速机,所述第一伺服电机的电机轴与第一减速机的输出端连接,所述第一减速机的输出端与第一关节座的一端固定,所述第一减速机的固定端与支撑架固定。通过第一伺服电机驱动第一减速机的输出端转动,使得第一关节座的一端在支撑座上摆动。
6、进一步地,所述第二关节驱动机构包括第二伺服电机和第二减速机,所述第二伺服电机的电机轴与第二减速机的输出端连接,所述第二减速机的输出端与第二关节座的一端固定,所述第二减速机的固定端与第一关节座的另一端固定。通过第二伺服电机驱动第二减速机的输出端转动,使得第二关节座的一端在第一关节座的另一端上摆动。
7、进一步地,所述升降驱动机构包括升降伺服电机、丝杆、滑套、滑轨、滑块、同步带、同步带轮和滑架,所述升降座上设置有滑块,所述滑架上设置有滑轨,所述滑轨与滑块配合,所述滑套套装在丝杆上,且滑套与滑架固定,所述升降伺服电机的电机轴和丝杆上各设置有一个同步带轮,两个同步带轮通过同步带传动。通过升降伺服电机驱动丝杆转动,使得滑套带动滑架通过滑轨、滑块在升降座上移动。
8、进一步地,所述刀具包括旋转锉、往复锉、电主轴、气动手指和刀具升降气缸,所述旋转锉、往复锉和气动手指分别设置在三个刀具升降气缸上,所述电主轴和刀具升降气缸均设置在滑架上。
9、进一步地,所述刀具包括电主轴,所述设置在滑架上。
10、进一步地,所述支撑架上设置有第一零点调节槽,所述第一关节座上设置有第二零点调节槽、第三零点调节槽,所述第二关节座上设置有第四零点调节槽,所述第一零点调节槽与第二零点调节槽配合,所述第三零点调节槽与第四零点调节槽配合。通过第一零点调节槽、第二零点调节槽可对第一关节座与支撑架的零点位置进行调节,通过第三零点调节槽、第四零点调节槽可对第二关节座与第一关节座的零点位置进行调节。
11、进一步地,所述升降座上设置有零点水平面,所述滑架上设置有零点水平块,所述零点水平面与零点水平块配合。通过零点水平面、零点水平块可对滑架与升降座的零点位置进行调节。
12、相比现有技术,本实用新型具有以下优点:该用于打磨的scara机器人中减速机选型为rv减速机,其承载能力大,可提高其使用寿命,同时通过设置第一零点调节槽、第二零点调节槽、第三零点调节槽、第四零点调节槽、零点水平面、零点水平块采用机械式零点调节方式对机器人中的第一关节座、第二关节座、滑架的零点位置进行调节,可提高其运动精度。
技术特征:
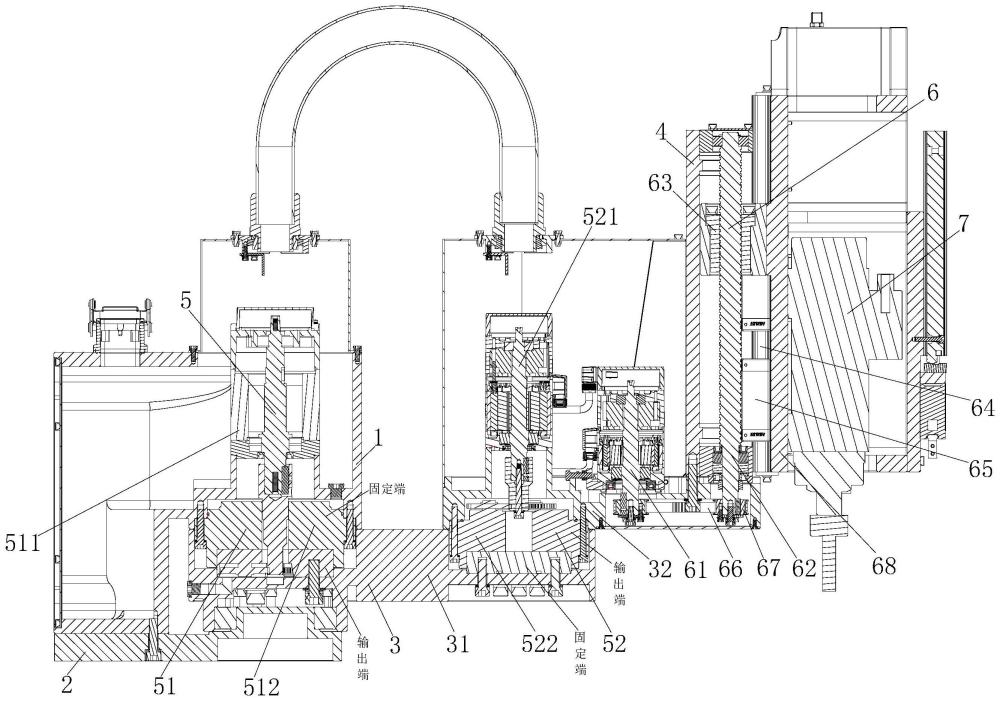
1.一种用于打磨的scara机器人,包括支撑架(1)和支撑座(2),所述支撑座(2)设置在支撑架(1)上,其特征在于:还包括关节座(3)、升降座(4)、以及用于驱动关节座(3)摆动的关节驱动机构(5)和用于驱动刀具(7)在升降座(4)上移动的升降驱动机构(6),所述关节座(3)设置在支撑座(2)上,所述升降座(4)设置在关节座(3)上,所述关节驱动机构(5)与关节座(3)配合,所述升降驱动机构(6)与升降座(4)配合。
2.根据权利要求1所述的用于打磨的scara机器人,其特征在于:所述关节座(3)包括第一关节座(31)和第二关节座(32),所述第一关节座(31)设置在支撑座(2)上,所述第二关节座(32)设置在第一关节座(31)上,所述升降座(4)设置在第二关节座(32)上。
3.根据权利要求1所述的用于打磨的scara机器人,其特征在于:所述关节驱动机构(5)包括用于驱动第一关节座(31)摆动的第一关节驱动机构(51)和用于驱动第二关节座(32)摆动的第二关节驱动机构(52),所述第一关节座(31)通过第一关节驱动机构(51)设置在支撑座(2)上,所述第二关节座(32)通过第二关节驱动机构(52)设置在第一关节座(31)上。
4.根据权利要求3所述的用于打磨的scara机器人,其特征在于:所述第一关节驱动机构(51)包括第一伺服电机(511)和第一减速机(512),所述第一伺服电机(511)的电机轴与第一减速机(512)的输出端连接,所述第一减速机(512)的输出端与第一关节座(31)的一端固定,所述第一减速机(512)的固定端与支撑架(1)固定。
5.根据权利要求3所述的用于打磨的scara机器人,其特征在于:所述第二关节驱动机构(52)包括第二伺服电机(521)和第二减速机(522),所述第二伺服电机(521)的电机轴与第二减速机(522)的输出端连接,所述第二减速机(522)的输出端与第二关节座(32)的一端固定,所述第二减速机(522)的固定端与第一关节座(31)的另一端固定。
6.根据权利要求1所述的用于打磨的scara机器人,其特征在于:所述升降驱动机构(6)包括升降伺服电机(61)、丝杆(62)、滑套(63)、滑轨(64)、滑块(65)、同步带(66)、同步带轮(67)和滑架(68),所述升降座(4)上设置有滑块(65),所述滑架(68)上设置有滑轨(64),所述滑轨(64)与滑块(65)配合,所述滑套(63)套装在丝杆(62)上,且滑套(63)与滑架(68)固定,所述升降伺服电机(61)的电机轴和丝杆(62)上各设置有一个同步带轮(67),两个同步带轮(67)通过同步带(66)传动。
7.根据权利要求1所述的用于打磨的scara机器人,其特征在于:所述刀具(7)包括旋转锉(71)、往复锉(72)、电主轴(73)、气动手指(74)和刀具升降气缸(75),所述旋转锉(71)、往复锉(72)和气动手指(74)分别设置在三个刀具升降气缸(75)上,所述电主轴(73)和刀具升降气缸(75)均设置在滑架(68)上。
8.根据权利要求1所述的用于打磨的scara机器人,其特征在于:所述刀具(7)包括电主轴(73),所述设置在滑架(68)上。
9.根据权利要求2所述的用于打磨的scara机器人,其特征在于:所述支撑架(1)上设置有第一零点调节槽(81),所述第一关节座(31)上设置有第二零点调节槽(82)、第三零点调节槽(83),所述第二关节座(32)上设置有第四零点调节槽(84),所述第一零点调节槽(81)与第二零点调节槽(82)配合,所述第三零点调节槽(83)与第四零点调节槽(84)配合。
10.根据权利要求6所述的用于打磨的scara机器人,其特征在于:所述升降座(4)上设置有零点水平面(85),所述滑架(68)上设置有零点水平块(86),所述零点水平面(85)与零点水平块(86)配合。
技术总结
本技术涉及一种用于打磨的SCARA机器人,属于机器人领域。本技术包括支撑架和支撑座,所述支撑座设置在支撑架上,其结构特点在于:还包括关节座、升降座、以及用于驱动关节座摆动的关节驱动机构和用于驱动刀具在升降座上移动的升降驱动机构,所述关节座设置在支撑座上,所述升降座设置在关节座上,所述关节驱动机构与关节座配合,所述升降驱动机构与升降座配合。所述关节座包括第一关节座和第二关节座,所述第一关节座设置在支撑座上,所述第二关节座设置在第一关节座上,所述升降座设置在第二关节座上。所述关节驱动机构包括用于驱动第一关节座摆动的第一关节驱动机构和用于驱动第二关节座摆动的第二关节驱动机构。
技术研发人员:章立锋,郑克朋,刘晓龙,张宾,郑军辉,张鑫在,李凯
受保护的技术使用者:杭州龙砺智能科技有限公司
技术研发日:20230825
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!