一种四足仿生机器人的机身的制作方法
本技术属于机器人,涉及一种四足仿生机器人的机身。
背景技术:
1、随着社会的进步和科技的发展,机器人的需求领域逐渐扩大,智能机器人越来越广泛地应用到人们的生产生活中,例如生产制造中专门设计的工位机器人,以及借鉴生物功能而设计的仿生计算器人等。另外,人们还对足式机器人是智能机器人中比较热门的一个种类,足式机器人中的四足仿生机器人是一种拥有感知环境、人机交互、自主规划和负载能力的智能机器人,其能够适用于娱乐酷玩、石油化工、安防巡检及勘探救援等多种应用场景,因此渐渐的在复杂环境中和人们生活中得到广泛应用。
2、四足机器人的机身结构是四足机器人重要的组成部分之一,机身结构既要与腿部结构连接,又要作为各种电子元器件的安装部位,但是现有的大部分四足机器人机身结构复杂,加工难度大,制造成本高,装配难度高。很多不具四足机器人不具备模块化设计,维护难度大,时间长,更换成本高。
技术实现思路
1、为了实现上述目的,本实用新型采用了以下技术方案:
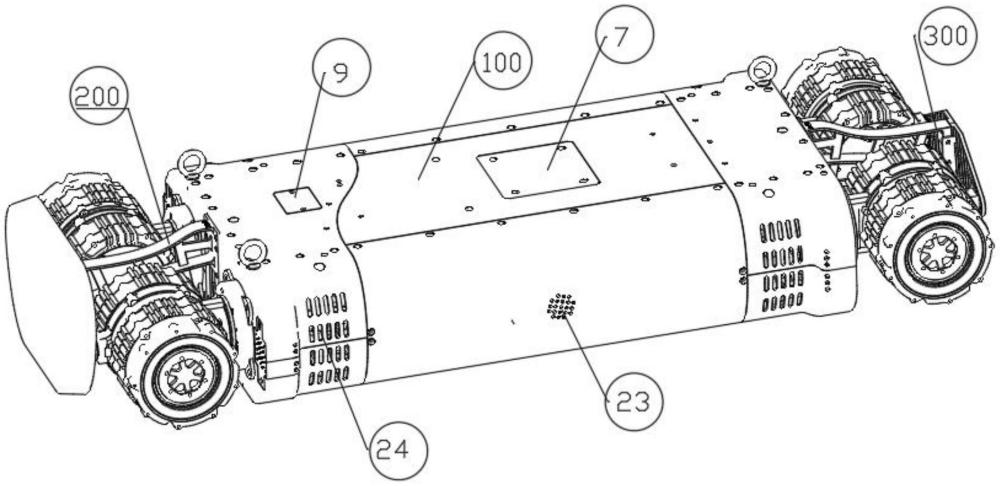
2、一种四足仿生机器人的机身,包括壳体、前支架、后支架、散热组件和关节电机模组;所述壳体的前端连接有前支架,且位于前支架连接位置的两侧分别安装有关节电机模组;所述壳体的后端连接有后支架,且位于后支架连接位置的两侧分别安装有关节电机模组;
3、所述壳体包括上壳组件、下壳组件、第一侧盖和第二侧盖;所述上壳组件和下壳组件上下相对连接;所述第一侧盖分别与上壳组件和下壳组件连接;所述第二侧盖分别与上壳组件和下壳组件连接;
4、所述上壳组件包括依次连接第一上盖板、第二上盖板和第三上盖板;所述下壳组件包括依次连接第一下底板、第二下底板和第三下底板;所述第一上盖板和第一下底板相对连接,且在两者连接处安装有散热组件;所述第三上盖板和第三下底板相对连接,且在两者连接处安装有散热组件。
5、作为本实用新型进一步的方案,所述壳体的内部设有第一支撑板和第二支撑板;所述第二支撑板的上下两端分别连接第二上盖板和第二下底板的一侧;所述第一支撑板的上下两端分别连接第二上盖板和第二下底板的另一侧。
6、作为本实用新型进一步的方案,所述第一支撑板和第二支撑板上设有若干个宽槽。
7、作为本实用新型进一步的方案,所述前支架包括头前支架、前支板、轴固定座和仿生机器人头部;所述头前支架的一端与第一上盖板和第一下底板连接,所述头前支架的另一端分别连接两块前支板;两块所述前支板的外侧上连接有仿生机器人头部,两块所述前支板的内侧上均安装有轴固定座;所述轴固定座连接所述关节电机模组的传动轴承内孔。
8、作为本实用新型进一步的方案,所述后支架包括尾后支架、后支板和轴固定座;所述尾后支架的一端与第三上盖板和第三下底板连接,所述尾后支架的另一端分别连接两块后支板;两块所述后支板的内侧上均安装有轴固定座;所述轴固定座连接所述关节电机模组的传动轴承内孔。
9、作为本实用新型进一步的方案,所述第二上盖板上设有imu盖。
10、作为本实用新型进一步的方案,所述第一上盖板设有机械臂盖。
11、作为本实用新型进一步的方案,所述散热组件包括风扇和固定板;所述第一上盖板和第三上盖板均设有上安装口,所述第一下底板和第三下底板均设有与所述上安装口相对的下安装口;在第一上盖板和第一下底板的相对连接处以及第三上盖板和第三下底板的相对连接处,所述上安装口和下安装口配合形成散热安装口;所述固定板安装于所述散热安装口上,所述风扇与固定板连接。
12、作为本实用新型进一步的方案,所述第一上盖板和第三上盖板均设有第一安装口,所述第一下底板和第三下底板均设有与所述第一安装口相对的第二安装口;在第一上盖板和第一下底板的相对连接处以及第三上盖板和第三下底板的相对连接处,所述第一安装口和第二安装口配合形成电机安装口;所述关节电机模组的电机安装于所述电机安装口。
13、作为本实用新型进一步的方案,所述第二侧盖上设有第一通气孔;所述第一上盖板、第三上盖板、第一下底板和第三下底板上均设有第二通气孔。
14、本实用新型的有益效果:
15、1.本实用新型的四足仿生机器人的机身通过将壳体拆件成上壳组件、下壳组件、第一侧盖和第二侧盖的拆件模块,同时还将上壳组件和下壳组件进行分块连接,形成模块化,极大的降低了生产制造成本,以及制造加工难度,同时由于左右侧盖可以拆卸,方便了维护,便于拆装维护;
16、2.本实用新型的四足仿生机器人的机身通过在壳体内部设置第一支撑板和第二支撑板,加强整个机身的强度;
17、3.本实用新型的四足仿生机器人的机身通过在壳体上安装散热组件以及设置通气孔,使得整个机身内部散热良好,增加机器寿命。
技术特征:
1.一种四足仿生机器人的机身,其特征在于,包括壳体、前支架、后支架、散热组件和关节电机模组;所述壳体的前端连接有前支架,且位于前支架连接位置的两侧分别安装有关节电机模组;所述壳体的后端连接有后支架,且位于后支架连接位置的两侧分别安装有关节电机模组;
2.根据权利要求1所述的四足仿生机器人的机身,其特征在于,所述壳体的内部设有第一支撑板和第二支撑板;所述第一支撑板的上下两端分别连接第二上盖板和第二下底板的一侧;所述第二支撑板的上下两端分别连接第二上盖板和第二下底板的另一侧。
3.根据权利要求2所述的四足仿生机器人的机身,其特征在于,所述第一支撑板和第二支撑板上设有若干个宽槽。
4.根据权利要求1所述的四足仿生机器人的机身,其特征在于,所述前支架包括头前支架、前支板、轴固定座和仿生机器人头部;所述头前支架的一端与第一上盖板和第一下底板连接,所述头前支架的另一端分别连接两块前支板;两块所述前支板的外侧上连接有仿生机器人头部,两块所述前支板的内侧上均安装有轴固定座;所述轴固定座连接所述关节电机模组的传动轴承内孔。
5.根据权利要求1所述的四足仿生机器人的机身,其特征在于,所述后支架包括尾后支架、后支板和轴固定座;所述尾后支架的一端与第三上盖板和第三下盖板连接,所述尾后支架的另一端分别连接两块后支板;两块所述后支板的内侧上均安装有轴固定座;所述轴固定座连接所述关节电机模组的传动轴承内孔。
6.根据权利要求1所述的四足仿生机器人的机身,其特征在于,所述第二上盖板上设有imu盖。
7.根据权利要求1所述的四足仿生机器人的机身,其特征在于,所述第一上盖板设有机械臂盖。
8.根据权利要求1所述的四足仿生机器人的机身,其特征在于,所述散热组件包括风扇和固定板;所述第一上盖板和第三上盖板均设有上安装口,所述第一下底板和第三下底板均设有与所述上安装口相对的下安装口;在第一上盖板和第一下底板的相对连接处以及第三上盖板和第三下底板的相对连接处,所述上安装口和下安装口配合形成散热安装口;所述固定板安装于所述散热安装口上,所述风扇与固定板连接。
9.根据权利要求1所述的四足仿生机器人的机身,其特征在于,所述第一上盖板和第三上盖板均设有第一安装口,所述第一下底板和第三下底板均设有与所述第一安装口相对的第二安装口;在第一上盖板和第一下底板的相对连接处以及第三上盖板和第三下底板的相对连接处,所述第一安装口和第二安装口配合形成电机安装口;所述关节电机模组的电机安装于所述电机安装口。
10.根据权利要求1所述的四足仿生机器人的机身,其特征在于,所述第二侧盖上设有第一通气孔;所述第一上盖板、第三上盖板、第一下底板和第三下底板上均设有第二通气孔。
技术总结
本技术公开了一种四足仿生机器人的机身,包括壳体、前支架、后支架、散热组件和关节电机模组;壳体的前后端分别连接有前支架和后支架,且位于两支架连接位置的两侧分别安装有关节电机模组;壳体包括上壳组件、下壳组件、第一侧盖和第二侧盖;上壳组件和下壳组件上下相对连接;第一侧盖和第二侧盖分别与上壳组件和下壳组件连接;上壳组件包括依次连接第一上盖板、第二上盖板和第三上盖板;下壳组件包括依次连接第一下底板、第二下底板和第三下底板;第一上盖板和第一下底板相对连接,第三上盖板和第三下底板相对连接。本技术通过将上壳组件、下壳组件、第一侧盖和第二侧盖进行拆件模块,形成模块化,降低了生产制造成本和制造加工难度。
技术研发人员:李波,林钦鸿,肖恺,韦昌宏
受保护的技术使用者:广东灵锶智能科技有限公司
技术研发日:20230830
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!