一种双充电送物机器人的制作方法
本技术涉及充电机器人,尤其涉及一种双充电送物机器人。
背景技术:
1、机器人是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类工作的工作,例如生产业、建筑业,或是危险的工作。机器人是高级整合控制论、机械电子、计算机、材料和仿生学的产物。目前在工业、医学、农业、餐饮甚至军事等领域中均等有重要用途。
2、现有的送物机器人使用充电触片与充电桩上的触片接触为电池充电,通过电池为机器人的各种动作提供电能,但是仅仅通过充电触片与充电桩上的触片接触为电池充电,在机器人充电时不便于机器人工作,针对上述问题,我们提出一种双充电送物机器人。
技术实现思路
1、本实用新型提供的一种双充电送物机器人,便于在机器人没电时,更换电池,机器人进行持续工作。
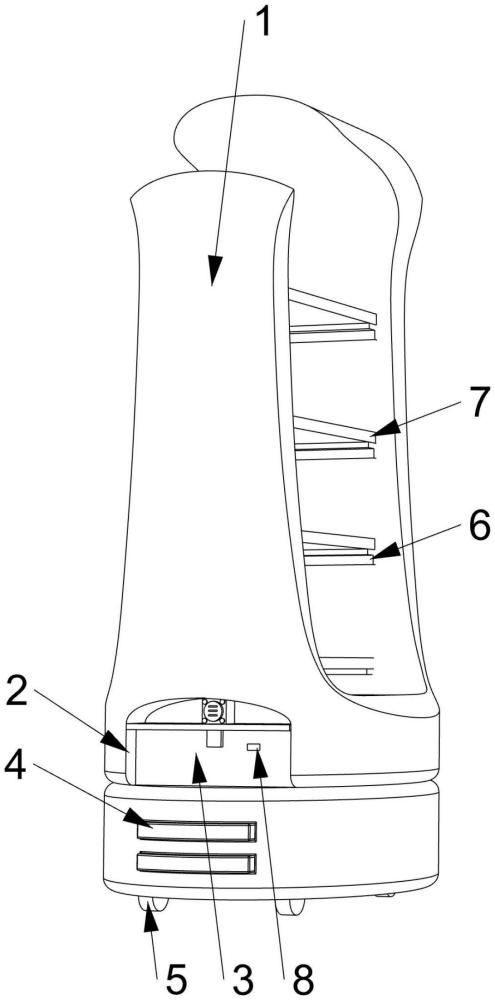
2、本实用新型提供的一种双充电送物机器人,包括机器人本体;所述机器人本体上设有放置槽;所述放置槽内设有电池;所述放置槽内设有电极片;所述电池上设有与电机片相互接触的第二电极片;所述机器人本体上设有充电触片;所述充电触片用于与充电桩的触片接触;所述电池上设有充电口。
3、进一步的,所述机器人本体下端面上设有移动轮组件;所述移动轮组件设有四组;四组所述移动轮组件以机器人本体中心为基准环绕均匀设置。
4、进一步的,所述机器人本体上设有托盘组件;所述托盘组件包括固定连接在机器人本体上的l型撑板;所述l型撑板上设有托盘。
5、进一步的,所述电极片、充电触片串联在同一个电路上。
6、本实用新型的有益效果:本实用新型提供的一种双充电送物机器人,便于在机器人没电时,更换电池,使得机器人可以进行持续工作,充电口8可以为电池进行充电。
技术特征:
1.一种双充电送物机器人,包括机器人本体(1);其特征在于:所述机器人本体(1)上设有放置槽(2);所述放置槽(2)内设有电池(3);所述放置槽(2)内设有电极片;所述电池上设有与电机片相互接触的第二电极片;所述机器人本体(1)上设有充电触片(4);所述充电触片(4)用于与充电桩的触片接触;所述电池(3)上设有充电口(8)。
2.根据权利要求1所述的一种双充电送物机器人,其特征在于:所述机器人本体(1)下端面上设有移动轮组件(5);所述移动轮组件(5)设有四组;四组所述移动轮组件(5)以机器人本体(1)中心为基准环绕均匀设置。
3.根据权利要求1所述的一种双充电送物机器人,其特征在于:所述机器人本体(1)上设有托盘组件;所述托盘组件包括固定连接在机器人本体(1)上的l型撑板(6);所述l型撑板(6)上设有托盘(7)。
4.根据权利要求1所述的一种双充电送物机器人,其特征在于:所述电极片、充电触片(4)串联在同一个电路上。
技术总结
本技术提供的一种双充电送物机器人,包括机器人本体;所述机器人本体上设有放置槽;所述放置槽内设有电池;所述放置槽内设有电极片;所述电池上设有与电机片相互接触的第二电极片;所述机器人本体上设有充电触片;所述充电触片用于与充电桩的触片接触;所述电池上设有充电口,便于在机器人没电时,更换电池,机器人进行持续工作。
技术研发人员:李聪,张元龙,张余君,张元杰,刘丽菊
受保护的技术使用者:深圳安赛步科技有限公司
技术研发日:20230904
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!