一种机器人中心及多功能建筑施工系统的制作方法
本技术涉及建筑用自动施工设备,尤其涉及一种机器人中心及多功能建筑施工系统。
背景技术:
1、提高建筑施工自动化的方式主要是采用建筑机器人辅助施工,但是建筑机器人的研究正处于起步阶段,目前的建筑机器人仅是针对单一功能和单一工序进行设计的,整个施工过程需要大量不同种类的机器人协作完成,需要一次性投入很高的成本,并且现有的建筑机器人的储料结构等需要更换的结构均需要在施工过程中根据实际需要人工进行更换,影响了施工效率。
2、因此,亟需提供一种与建筑机器人匹配的机器人中心,实现对建筑机器人上需要更换的结构自动更换,降低施工成本,提升施工效率。
技术实现思路
1、本实用新型的第一个目的在于提出一种机器人中心,该机器人中心能够暂存用于多工序施工的施工执行机构,并给能够实现建筑机器人的料箱机构的自动更换,降低施工成本,提升施工效率。
2、本实用新型的第二个目的在于提出一种多功能建筑施工系统,该多功能建筑施工系统能够在实际施工过程中实现多个工序的施工,降低施工成本,提升施工效率。
3、为实现上述技术效果,本实用新型的技术方案如下:
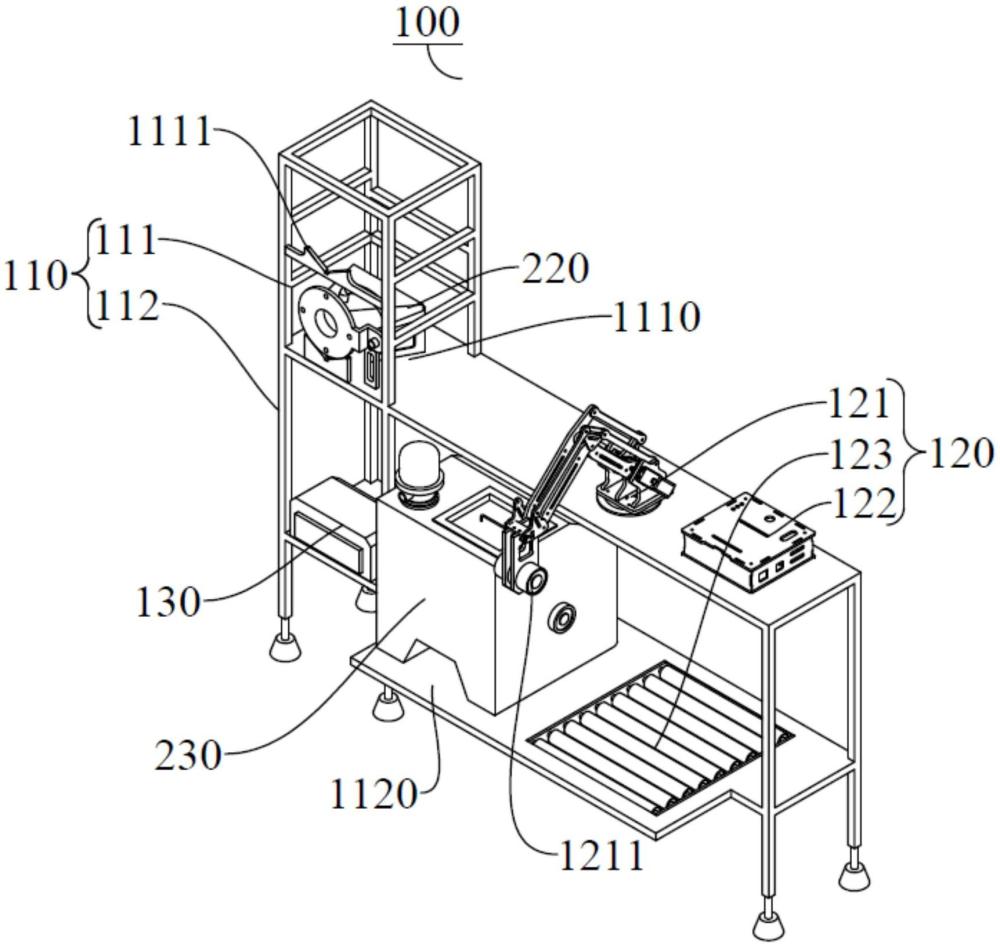
4、本实用新型公开了一种机器人中心,所述机器人中心用于暂存多功能建筑施工机器人的施工执行机构以及更换所述多功能建筑施工机器人的料箱机构,所述机器人中心包括:支架,所述支架上设有第一容纳位和第二容纳位,所述第一容纳位用于容纳所述施工执行机构,所述第二容纳位用于容纳所述料箱机构;更换机构,所述更换机构设在所述支架上,且用于将所述多功能建筑施工机器人的所述料箱机构搬运至所述第二容纳位,或者将所述第二容纳位上的所述料箱机构搬运至所述多功能建筑施工机器人。
5、在一些实施例中,所述机器人中心还包括充电机构,所述充电机构用于给所述多功能建筑施工机器人充电。
6、在一些实施例中,所述支架包括:第一框架结构,所述第一框架结构设有多个沿竖直方向间隔设置的所述第一容纳位;第二框架结构,所述第二框架结构用于支撑所述第一框架结构,且放置于外部支撑面上,所述更换机构及所述第二容纳位设在所述第二框架结构。
7、在一些具体的实施例中,所述第二框架结构的底壁设有与所述外部支撑面止抵的支撑脚。
8、在一些具体的实施例中,所述第二框架结构包括框架本体和连接在所述框架本体上的多个沿竖直方向间隔设置的支撑板,所述第二容纳位形成于所述支撑板上,所述更换机构设在所述支撑板且与所述第二容纳位并列设置和/或设在所述第二容纳位的上方。
9、在一些实施例中,所述第一容纳位上设有与所述施工执行机构形状匹配的放置架。
10、在一些实施例中,所述更换机构包括更换机械臂,所述更换机械臂的执行端设有与所述料箱机构配合的配合结构。
11、在一些具体的实施例中,所述配合结构包括能够与所述料箱机构吸合的电磁装置;或者:所述配合结构包括能够夹持所述料箱机构的夹爪机构。
12、在一些具体的实施例中,所述更换机构还包括多个运输辊,多个所述运输辊将所述料箱机构运输至所述多功能建筑施工机器人,或者接收所述多功能建筑施工机器人的所述料箱机构。
13、本实用新型还公开了一种多功能建筑施工系统,包括多功能建筑施工机器人以及前文所述的机器人中心,所述多功能建筑施工机器人能够自动运动到所述机器人中心所在的位置以更换施工执行机构及料箱机构。
14、本实用新型的机器人中心的有益效果:由于该机器人中心可以将多种不同的施工执行机构放置在第一容纳位处,将备用的料箱机构放置在第二容纳位,在施工过程中,多功能建筑施工机器人能够通过自带的行走机构回到机器人中心,机器人中心上的更换机构可以对多功能建筑施工机器人进行料箱机构的更换,多功能建筑施工机器人可以根据实际施工需求更换不同的施工执行机构,由此,仅仅采用一个多功能建筑施工机器人就可以完成多道工序,降低了施工成本,并且在施工过程中,实现了多功能建筑施工机器人的料箱机构的自动更换,降低了施工人员的劳动强度,提升了施工效率。
15、本实用新型的多功能建筑施工系统的有益效果:由于具有前文所述的机器人中心,该多功能建筑施工系统能够在实际施工过程中实现多个工序的施工,降低施工成本,提升施工效率。
16、本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
技术特征:
1.一种机器人中心,其特征在于,所述机器人中心用于暂存多功能建筑施工机器人的施工执行机构以及更换所述多功能建筑施工机器人的料箱机构,所述机器人中心包括:
2.根据权利要求1所述的机器人中心,其特征在于,所述机器人中心还包括充电机构,所述充电机构用于给所述多功能建筑施工机器人充电。
3.根据权利要求1所述的机器人中心,其特征在于,所述支架包括:
4.根据权利要求3所述的机器人中心,其特征在于,所述第二框架结构的底壁设有与所述外部支撑面止抵的支撑脚。
5.根据权利要求3所述的机器人中心,其特征在于,所述第二框架结构包括框架本体和连接在所述框架本体上的多个沿竖直方向间隔设置的支撑板,所述第二容纳位形成于所述支撑板上,所述更换机构设在所述支撑板且与所述第二容纳位并列设置和/或设在所述第二容纳位的上方。
6.根据权利要求1所述的机器人中心,其特征在于,所述第一容纳位上设有与所述施工执行机构形状匹配的放置架。
7.根据权利要求1所述的机器人中心,其特征在于,所述更换机构包括更换机械臂,所述更换机械臂的执行端设有与所述料箱机构配合的配合结构。
8.根据权利要求7所述的机器人中心,其特征在于,所述配合结构包括能够与所述料箱机构吸合的电磁装置;或者:
9.根据权利要求7所述的机器人中心,其特征在于,所述更换机构还包括多个运输辊,多个所述运输辊将所述料箱机构运输至所述多功能建筑施工机器人,或者接收所述多功能建筑施工机器人的所述料箱机构。
10.一种多功能建筑施工系统,其特征在于,包括多功能建筑施工机器人以及如权利要求1-9中任一项所述的机器人中心,所述多功能建筑施工机器人能够自动运动到所述机器人中心所在的位置以更换施工执行机构及料箱机构。
技术总结
本技术公开了一种机器人中心及多功能建筑施工系统,机器人中心用于暂存多功能建筑施工机器人的施工执行机构以及更换多功能建筑施工机器人的料箱机构,机器人中心包括支架和更换机构,支架上设有第一容纳位和第二容纳位,第一容纳位用于容纳施工执行机构,第二容纳位用于容纳料箱机构,更换机构设在支架上,且用于将多功能建筑施工机器人的料箱机构搬运至第二容纳位,或者将第二容纳位上的料箱机构搬运至多功能建筑施工机器人。该机器人中心能够暂存用于多工序施工的施工执行机构并给能够实现建筑机器人的料箱机构的自动更换,降低施工成本,提升施工效率。
技术研发人员:刘东,廖群辉,麦之超,赵翔,田新泉
受保护的技术使用者:华西工程科技(深圳)股份有限公司
技术研发日:20230907
技术公布日:2024/5/19
- 还没有人留言评论。精彩留言会获得点赞!