一种控制焊接机器人的手操器
本技术涉及自动化焊接领域,特别是涉及一种控制焊接机器人的手操器。
背景技术:
1、现阶段管道焊接机器人的各种自动模式仍需要人工在焊接工作时通过连接控制器的手操器对正在爬行的电机进行微调,而手操器往往与焊接机器人配套销售及使用。目前我国市场上焊接机器人的品牌主要分为日系、欧系和一小部分份额的国产。但因手操器捆绑销售的特殊性,使得目前国内自研控制器的公司较难获得市场。
2、目前应用于管道焊接机器人的手操器的体积较大,使得操作者在操作时可能需要双手持握,较为不便;一部分功能也较为繁琐,极少用到或不用到;没有显示实时焊枪位置、爬行速度等参数信息的功能;且进口的价格也相对较高,导致整体焊接的成本上升。另一方面,嵌入式的技术已经相当成熟,只要在满足手操器功能的前提下,在确定与控制器的通信方式及通信协议后,以单片机为mcu的手操器完全可以与国内自研的控制器对接,满足相应需求。
技术实现思路
1、针对上述现有技术存在的问题,本实用新型的目的是提供一种控制焊接机器人的手操器,该手操器结构简单、小巧方便、集约性强成本低廉,且能够显示焊接过程的实时参数信息,因此,有利于对焊接机器人的控制,并减少设备成本。
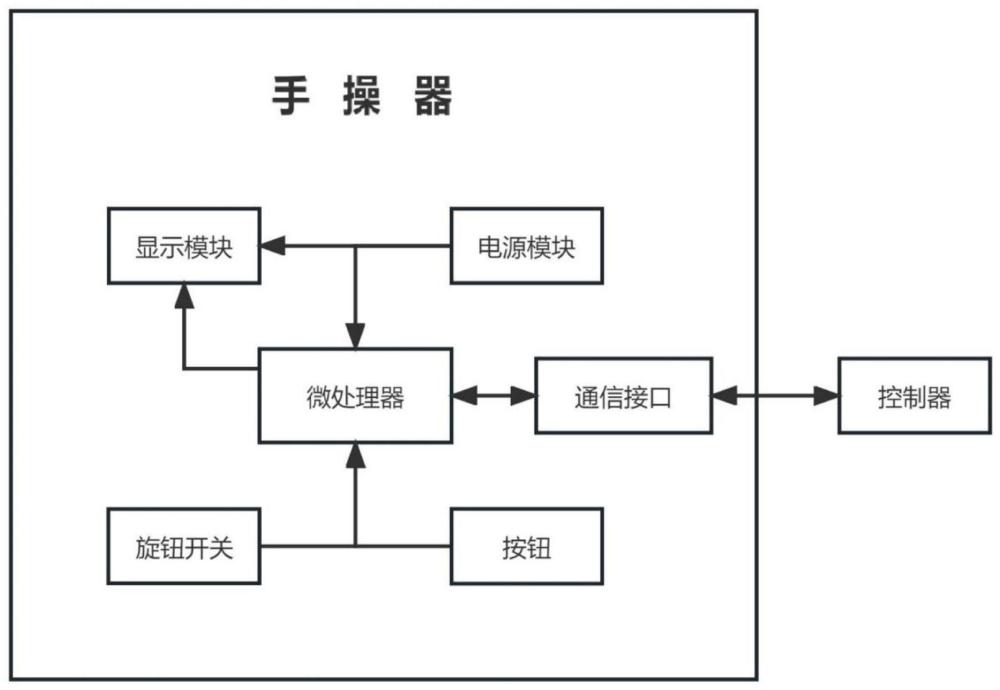
2、为实现上述目的,本实用新型提供了一种控制焊接机器人的手操器,包括:微处理器、电源模块、通信接口、旋钮开关、按钮和显示模块;
3、其中,微处理器分别与电源模块、通信接口、旋钮开关、按钮、显示模块单独连接;电源模块与显示模块连接;
4、所述手操器的通信接口通过控制器与焊接机器人的电机连接;
5、所述微处理器通过通信接口与控制器通信,控制电机运动;电源模块调整外部供电的电压,分别供给微处理器和显示模块;所述微处理器采集旋钮开关和按钮输入的控制信息i1,并经通信接口将i1发送至控制器,控制器根据i1控制焊枪工作;所述微处理器通过通信接口接收控制器采集的焊接过程的实时参数信息,并传输至显示模块进行显示。
6、本实用新型所设计的手操器结构简单、小巧方便、集约性强。同时,由于所采用的构成部件都是常见的电子器件,本身成本低廉,有较强的可替代性,能够避免焊接机器人与手操器捆绑销售的缺陷,可在整体上减小焊接机器人使用过程中的焊接成本。此外,高度集约的旋钮开关和按钮使得技术人员在实际操作过程中,能够实现单手操作,并根据显示模块显示焊接过程的实时参数信息,进行更为细致准确的操控。
7、进一步地,该手操器还包括焊枪转接口;
8、微处理器通过焊枪转接口与焊枪连接;
9、微处理器可采集通过焊枪上的按键输入的控制信息i2,并经通信接口将i2发送至控制器,控制器根据i2控制焊枪工作。
10、进一步地,该手操器还包括预留模块;
11、该预留模块包括:预留串口、预留i/o和预留按键,分别单独与微处理器连接;
12、该预留模块用于应急替代和功能扩展。具体而言,预留串口或预留i/o可代替通信接口与控制器连接,用于微处理器与控制器之间的通信,也可以用于新接入其它模块;预留按键可代替之前启用的按键发挥功能,也能够作为新功能的拓展按键。此外,预留模块可用于增加指示,检测电压、电流等。
13、进一步地,该手操器还包括usb下载口;
14、usb下载口与微处理器连接,用于历史焊接数据的下载。
15、一般而言,如果应用51单片机作为微处理器,那么该手持器就能够以51单片机的存储空间作为临时的存储空间,以存储历史焊接数据。由于51单片机的存储空间有限,不能够作为长期专用的数据存储器使用,所以需要及时将历史焊接数据通过usb下载口导出。
16、进一步地,该电源模块包括:第一电源模块和第二电源模块;
17、第一电源模块用于调整外部供电的电压,并分别供给微处理器和第二电源模块;第二电源模块用于接收第一电源模块供电,并再次调整电压,以供给显示模块;
18、可选地,电源模块的模式存在多种选择。一般而言,可由控制器输入电源线牵出一根电源线至电源模块,由电源模块完成上述变压工作,再对微处理器和显示模块供电。此外,还可以采用蓄电池或干电池作为电源。
19、优选地,对于该手操器而言,通信接口可替换,可满足微处理器与不同信号控制器之间的通信要求。
20、优选地,电源模块、通信接口、usb下载口、焊枪转接口、焊接电源转接口均在印制电路板的右侧边缘从上往下依次排列;旋钮开关位于印制电路板左侧边缘;按钮位于旋钮开关右边;显示模块位于旋钮开关和按钮上方,且在印制电路板空间上方;微处理器位于显示模块和电源模块之间。
21、进一步地,预留i/o位于微处理器上边与右边,呈半包围结构;预留串口和按键均位于焊枪转接按钮上边和右边,也呈半包围结构。
22、进一步地,旋钮开关和按钮与微处理器的接口均位于屏幕的空间下方,印制电路板的平面位置,接线均位于印制电路板的背面,使外观整洁美观。
23、进一步地,通信接口位于旋钮开关、按钮与微处理器的接口的右边,在印制电路板右侧。
24、进一步地,对于任一手操器,每组旋钮开关和按钮处在同一水平线上,且周围由文字说明丝印。
25、优选地,对于任一手操器,所有串口的接口均采用防反接的端子。
26、优选地,该印制电路板的四个直角做圆弧处理。
27、本实用新型所设计的手操器结构简单、小巧方便、集约性强。同时,由于所采用的构成部件都是常见的电子器件,本身成本低廉,有较强的可替代性,能够避免焊接机器人与手操器捆绑销售的缺陷,可在整体上减小焊接机器人使用过程中的焊接成本。此外,高度集约的旋钮开关和按钮使得技术人员在实际操作过程中,能够实现单手操作,并根据显示模块显示焊接过程的实时参数信息,进行更为细致准确的操控。
技术特征:
1.一种控制焊接机器人的手操器,其特征在于,包括:微处理器、电源模块、通信接口、旋钮开关、按钮和显示模块;
2.根据权利要求1所述的控制焊接机器人的手操器,其特征在于,还包括:焊枪转接口;
3.根据权利要求1所述的控制焊接机器人的手操器,其特征在于,还包括:预留模块;
4.根据权利要求1所述控制焊接机器人的手操器,其特征在于,还包括:usb下载口;
5.根据权利要求1所述控制焊接机器人的手操器,其特征在于,所述电源模块包括:第一电源模块和第二电源模块;
6.根据权利要求1至5任一权项所述的控制焊接机器人的手操器,其特征在于,所有串口的接口均采用防反接的端子。
技术总结
本技术提供一种控制焊接机器人的手操器,涉及自动化焊接领域。包括微处理器、电源模块、通信接口、旋钮开关、按钮和显示模块;微处理器分别与电源模块、通信接口、旋钮开关、按钮、显示模块单独连接;电源模块与显示模块连接。手操器的通信接口通过控制器与焊接机器人的电机连接。微处理器由电源模块供电,采集旋钮开关和按钮输入的控制信息,经通信接口将控制信息发送至控制器,控制器根据控制信息控制焊枪工作,并通过通信接口接收控制器采集的焊接过程的实时参数信息,传输至显示模块进行显示。该手操器结构简单、小巧方便、集约性强,可单手操作,且成本低廉,具有较强的可替代性。
技术研发人员:文斌,项嘉辉,宋全东,王冬萌,简雨旗,王月祥,李宇荣,陈旭,康健
受保护的技术使用者:成都信息工程大学
技术研发日:20230907
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!