一种机器人减震装置的制作方法
本申请涉及机器人,具体为一种机器人减震装置。
背景技术:
1、随着人工智能的快速发展,越来越多的生活场景中配备有场景服务机器人,诸如餐厅、酒店、写字楼等场景就出现了配送机器人。但是相关技术中,配送机器人在移动过程中容易出现急剧抖动,移动的稳定性较差。
2、现有的已授权中国实用新型公告号为:cn208027574u,公开日为:1922-05-16,公开了机器人用减震装置和机器人,其通过减震装置会安装在机器人上并与机器人同步移动,当出现颠簸或避障刹停时,减震装置的载体会与机器人的运动同步,配重由于惯性的作用会产生移动延迟的效果,借由这种运动频率的不一致性,可以起到消耗抖动的效果,从而可以避免和改善在颠簸、紧急避障刹停时的急剧抖动,增强了机器人的移动稳定性。
3、上述方案中通过在机器人颠簸时带动配重移动,通过配重产生的移动延迟将机器人的颠簸减弱,达到阻尼减震效果,但是其弹性件与配重及载体均为拉钩套设,在颠簸的过程中拉钩容易出现脱落,影响阻尼减震效果降低。
4、所以有必要提供一种机器人减震装置来解决上述问题。
5、需要说明的是,本背景技术部分中公开的以上信息仅用于理解本申请构思的背景技术,并且因此,它可以包含不构成现有技术的信息。
技术实现思路
1、基于现有技术中存在的上述问题,本申请所要解决的问题是:提供一种机器人减震装置,达到解决其弹性件与配重及载体均为拉钩套设,在颠簸的过程中拉钩容易出现脱落,影响阻尼减震效果降低问题。
2、本申请解决其技术问题所采用的技术方案是:一种机器人减震装置,包括:
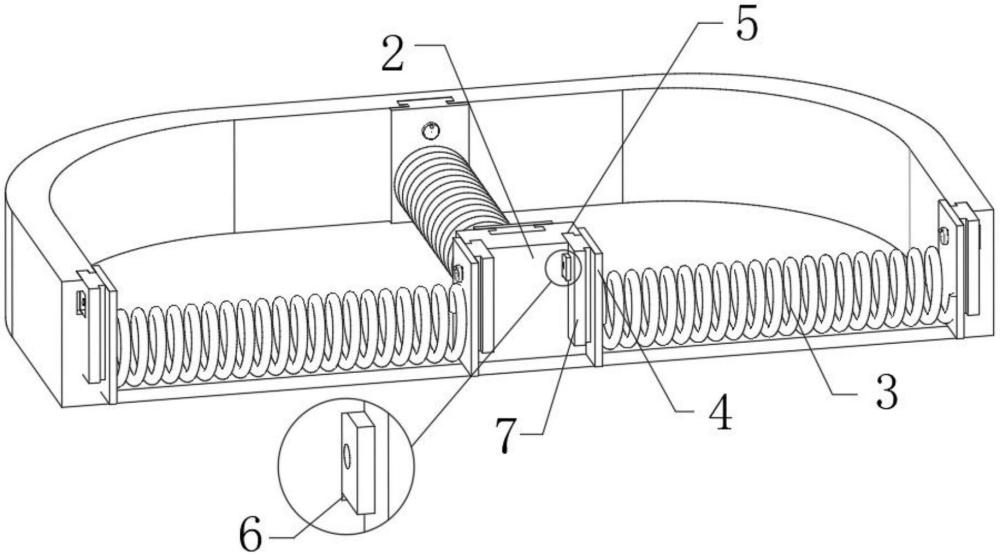
3、载体,内部设置有配重,载体内部设置有四组弹性件;
4、固定板,位于弹性件外侧,固定板外侧设置有卡槽,卡槽外侧设置有定位槽,固定板外侧固定连接卡板,卡板内部设置有移槽,移槽内部活动设置有定位块,定位块内部设置有转槽,转槽内部活动设置有转杆,转杆内侧固定连接有连杆,连杆内侧固定设置有转块;
5、挤压槽,位于转块内部,挤压槽内部活动设置有拉柱,拉柱外侧固定连接有侧板,侧板一侧固定设置有弹簧,拉柱内侧固定连接有拨动头,拉柱外侧固定连接有插头,插头外侧设置有锁定槽,锁定槽内侧设置有挡板,插头外侧固定连接有锁定块。
6、进一步的,每组弹性件两侧均固定连接有固定板,固定板均设置为竖向板状结构,载体内壁均对应固定板设置有四组卡槽,配重侧壁均对应固定板设置有四组卡槽,卡槽均设置为t形槽,卡槽上端外侧均设置有定位槽,定位槽均设置为矩形槽。
7、进一步的,固定板外侧均固定连接有卡板,卡板均设置为t形板状结构,卡板尺寸均与卡槽相适配,卡板均位于卡槽内,卡板上端均设置有移槽,移槽均设置为矩形槽,移槽均与定位槽对齐,移槽尺寸均与定位槽相适配,移槽外侧均贯穿卡板。
8、进一步的,定位块尺寸均与移槽相适配,定位块外侧均延伸至定位槽内,转槽两侧均贯穿定位块,转槽均设置为螺纹孔。
9、进一步的,转杆均设置为横向螺纹杆,转杆均与定位块螺接,连杆均贯穿固定板并延伸至外侧,转块均设置为圆形块状结构。
10、进一步的,挤压槽均设置为柱状槽,拉柱均设置为横向柱状结构,拉柱外径尺寸小于挤压槽内径,拉柱两端均贯穿挤压槽并延伸至外侧,侧板外径均与挤压槽相适配。
11、进一步的,拨动头设置为珠状结构。
12、进一步的,卡槽内侧均对应拉柱设置有锁定槽,锁定槽均与拉柱对齐,锁定槽尺寸均与拉柱尺寸相适配,锁定槽内侧均贯穿卡槽,锁定槽内侧均对称固定安装有两组挡板,挡板均设置为弧形板状结构。
13、进一步的,插头尺寸均小于两组挡板内壁间距,锁定块设置为椭圆板状结构,锁定块短直径与插头直径相适配,锁定块长直径大于插头直径,锁定块位于插头内,锁定块均与挡板垂直。
14、本申请的有益效果是:本申请提供的一种机器人减震装置,通过设置的定位槽配合定位块,可以便于将卡板进行定位,使得弹性件固定,避免在阻尼减震过程中弹性件出现脱落,影响减震效果。
15、通过设置的转块配合转杆,可以便于将定位块进行移动,便于对弹性件进行拆装,通过设置的卡板配合卡槽,可以便于将固定板进行预定位,便于进行安装,通过设置的锁定块配合锁定槽,可以便于将转块锁定,避免在减震过程中转杆出现移动。
16、除了上面所描述的目的、特征和优点之外,本申请还有其它的目的、特征和优点。下面将参照图,对本申请作进一步详细的说明。
技术特征:
1.一种机器人减震装置,其特征在于,包括:
2.根据权利要求1所述的一种机器人减震装置,其特征在于:每组所述弹性件(3)两侧均固定连接有所述固定板(4),所述固定板(4)均设置为竖向板状结构,所述载体(1)内壁均对应所述固定板(4)设置有四组所述卡槽(5),所述配重(2)侧壁均对应所述固定板(4)设置有四组所述卡槽(5),所述卡槽(5)均设置为t形槽,所述卡槽(5)上端外侧均设置有所述定位槽(6),所述定位槽(6)均设置为矩形槽。
3.根据权利要求1所述的一种机器人减震装置,其特征在于:所述固定板(4)外侧均固定连接有所述卡板(7),所述卡板(7)均设置为t形板状结构,所述卡板(7)尺寸均与所述卡槽(5)相适配,所述卡板(7)均位于所述卡槽(5)内,所述卡板(7)上端均设置有所述移槽(8),所述移槽(8)均设置为矩形槽,所述移槽(8)均与所述定位槽(6)对齐,所述移槽(8)尺寸均与所述定位槽(6)相适配,所述移槽(8)外侧均贯穿所述卡板(7)。
4.根据权利要求1所述的一种机器人减震装置,其特征在于:所述定位块(9)尺寸均与所述移槽(8)相适配,所述定位块(9)外侧均延伸至所述定位槽(6)内,所述转槽(10)两侧均贯穿所述定位块(9),所述转槽(10)均设置为螺纹孔。
5.根据权利要求1所述的一种机器人减震装置,其特征在于:所述转杆(11)均设置为横向螺纹杆,所述转杆(11)均与所述定位块(9)螺接,所述连杆(12)均贯穿所述固定板(4)并延伸至外侧,所述转块(13)均设置为圆形块状结构。
6.根据权利要求1所述的一种机器人减震装置,其特征在于:所述挤压槽(14)均设置为柱状槽,所述拉柱(15)均设置为横向柱状结构,所述拉柱(15)外径尺寸小于所述挤压槽(14)内径,所述拉柱(15)两端均贯穿所述挤压槽(14)并延伸至外侧,所述侧板(16)外径均与所述挤压槽(14)相适配。
7.根据权利要求1所述的一种机器人减震装置,其特征在于:所述拨动头(18)设置为珠状结构。
8.根据权利要求1所述的一种机器人减震装置,其特征在于:所述卡槽(5)侧壁均对应所述拉柱(15)设置有所述锁定槽(20),所述锁定槽(20)均与所述拉柱(15)对齐,所述锁定槽(20)尺寸均与所述拉柱(15)尺寸相适配,所述锁定槽(20)内侧均贯穿所述卡槽(5),所述锁定槽(20)内侧均对称固定安装有两组所述挡板(21),所述挡板(21)均设置为弧形板状结构。
9.根据权利要求1所述的一种机器人减震装置,其特征在于:所述插头(19)尺寸均小于两组所述挡板(21)内壁间距,所述锁定块(22)设置为椭圆板状结构,所述锁定块(22)短直径与所述插头(19)直径相适配,所述锁定块(22)长直径大于所述插头(19)直径,所述锁定块(22)位于所述插头(19)内,所述锁定块(22)均与所述挡板(21)垂直。
技术总结
本申请公开了一种机器人减震装置,属于机器人技术领域。主要包括载体,内部设置有配重,载体内部设置有四组弹性件;固定板,位于弹性件外侧,固定板外侧设置有卡槽,卡槽外侧设置有定位槽,固定板外侧固定连接卡板,卡板内部设置有移槽,移槽内部活动设置有定位块,定位块内部设置有转槽,转槽内部活动设置有转杆,转杆内侧固定连接有连杆,连杆内侧固定设置有转块;挤压槽,位于转块内部,挤压槽内部活动设置有拉柱,拉柱外侧固定连接有侧板。本申请的一种机器人减震装置,通过设置的定位槽配合定位块,可以便于将卡板进行定位,使得弹性件固定,避免在阻尼减震过程中弹性件出现脱落,影响减震效果。
技术研发人员:袁静静
受保护的技术使用者:诺宸智能装备(常州)有限公司
技术研发日:20230919
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!