一种可交替抓取物料的机械抓手的制作方法
本技术涉及机械抓手,具体的,涉及一种可交替抓取物料的机械抓手。
背景技术:
1、在工业自动化技术领域以及许多生产领域,机械抓手可以说是非常普遍,机械抓手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械抓手机器各自的优点,现有的机械抓手多种多样,规格不同,从而满足不同产品的抓取工作,机械抓手的抓取方式主要是真空吸取和夹钳夹持。
2、然而现有的机械抓手在抓取板料时,其操作过程为首先通过机械抓手抓取待加工的板料,随后将板料放置在加工位置处,从而对板料进行加工,只能实现单一的对待加工的板料和已加工完的板料进行抓取,无法实现交替抓取板料,料板的位移时间较长,从而导致对板料的加工效率较低。
技术实现思路
1、本实用新型的目的在于提供一种可交替抓取物料的机械抓手,以解决上述背景技术中提出的现有的机械抓手在抓取板料时,其操作过程为首先通过机械抓手抓取待加工的板料,随后将板料放置在加工位置处,从而对板料进行加工,只能实现单一的对待加工的板料和已加工完的板料进行抓取,无法实现交替抓取板料,料板的位移时间较长,从而导致对板料的加工效率较低的问题。
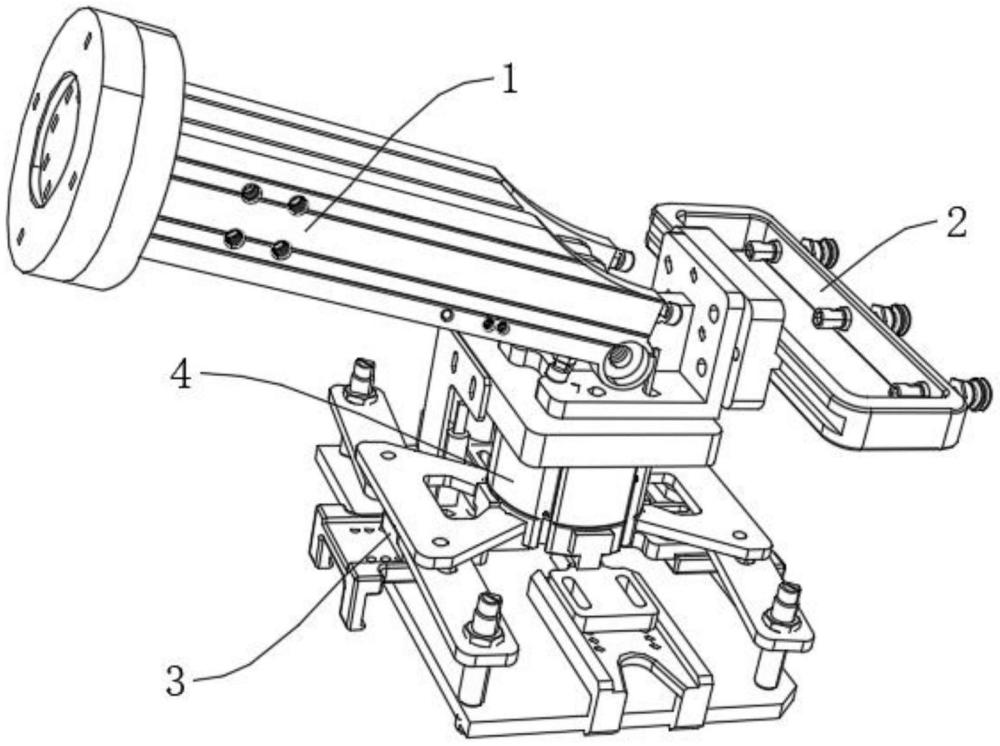
2、本实用新型提供如下技术方案:一种可交替抓取物料的机械抓手,包括固定支撑臂机构,所述固定支撑臂机构的输出端转动连接有可交替对板料抓取的抓取机构,所述抓取机构包括用于固定夹持已加工板料的夹持机构和用于吸附已加工板料的吸附机构,所述夹持机构和吸附机构可交替吸附待加工板料和夹持已加工板料,所述吸附机构远离支撑臂机构的一侧底部固定连接有安装板,所述安装板的一侧固定安装有气缸夹爪,所述气缸夹爪的输出端固定连接在夹持机构的一端,所述固定支撑臂机构与夹持机构和吸附机构构成转动连接机构。
3、作为上述技术方案的优选,所述固定支撑臂机构包括底座,所述底座顶部固定连接有安装臂,所述安装臂的内腔底部设置有气缸,所述气缸的输出端固定连接有气缸推拉杆,所述气缸推拉杆顶部固定连接有铰接组件,所述铰接组件顶端与吸附机构传动连接。
4、作为上述技术方案的优选,所述吸附机构包括安装框,所述安装框的顶部固定安装有电动吸盘,所述安装框的底部固定连接有l形安装板,所述l形安装板的底部固定连接有连接块,所述连接块外壁与铰接组件顶部内壁构成转动连接结构。
5、作为上述技术方案的优选,所述l形安装板远离固定支撑臂机构的一侧固定连接在安装板的一侧,所述气缸夹爪固定安装在安装板远离吸附机构的一侧。
6、作为上述技术方案的优选,所述夹持机构包括固定安装在气缸夹爪输出端的固定夹持板,所述固定夹持板靠近气缸夹爪的一侧设置有连接板,所述连接板的一端固定连接在气缸夹爪的输出端,所述连接板的一侧固定连接有固定杆。
7、作为上述技术方案的优选,所述固定夹持板的数量为四组,且沿着气缸夹爪的中心的均匀等距分布,所述固定夹持板与板料相互配合,所述固定夹持板用于夹持固定板料。
8、作为上述技术方案的优选,所述电动吸盘的数量为三组,且沿着安装框顶部均匀等距分布,所述电动吸盘可吸附板料。
9、作为上述技术方案的优选,所述气缸可以推拉气缸夹爪进行90度范围的转动,所述气缸夹爪的推拉可使夹持机构夹紧与收放。
10、与现有技术相比,本实用新型的有益效果是:
11、本实用新型先将待加工的板料通过启动气缸夹爪,从而带动夹持机构便于对板料进行抓取,随后通过启动气缸,然后翻转90度,进而通过吸附机构抓取已经完成加工的板料,此时再度控制启动气缸,使得再次翻转90度,从而将待加工的板料放置在加工位置处,从而能够实现交替抓取板料,简单快捷,缩短了板料的位移时间,提高了对板料的加工效率。
技术特征:
1.一种可交替抓取物料的机械抓手,包括固定支撑臂机构,其特征在于:所述固定支撑臂机构的输出端转动连接有可交替对板料抓取的抓取机构,所述抓取机构包括用于固定夹持已加工板料的夹持机构和用于吸附已加工板料的吸附机构,所述夹持机构和吸附机构可交替吸附待加工板料和夹持已加工板料,所述吸附机构远离支撑臂机构的一侧底部固定连接有安装板,所述安装板的一侧固定安装有气缸夹爪,所述气缸夹爪的输出端固定连接在夹持机构的一端,所述固定支撑臂机构与夹持机构和吸附机构构成转动连接机构。
2.根据权利要求1所述的一种可交替抓取物料的机械抓手,其特征在于:所述固定支撑臂机构包括底座,所述底座顶部固定连接有安装臂,所述安装臂的内腔底部设置有气缸,所述气缸的输出端固定连接有气缸推拉杆,所述气缸推拉杆顶部固定连接有铰接组件,所述铰接组件顶端与吸附机构传动连接。
3.根据权利要求1所述的一种可交替抓取物料的机械抓手,其特征在于:所述吸附机构包括安装框,所述安装框的顶部固定安装有电动吸盘,所述安装框的底部固定连接有l形安装板,所述l形安装板的底部固定连接有连接块,所述连接块外壁与铰接组件顶部内壁构成转动连接结构。
4.根据权利要求3所述的一种可交替抓取物料的机械抓手,其特征在于:所述l形安装板远离固定支撑臂机构的一侧固定连接在安装板的一侧,所述气缸夹爪固定安装在安装板远离吸附机构的一侧。
5.根据权利要求1所述的一种可交替抓取物料的机械抓手,其特征在于:所述夹持机构包括固定安装在气缸夹爪输出端的固定夹持板,所述固定夹持板靠近气缸夹爪的一侧设置有连接板,所述连接板的一端固定连接在气缸夹爪的输出端,所述连接板的一侧固定连接有固定杆。
6.根据权利要求5所述的一种可交替抓取物料的机械抓手,其特征在于:所述固定夹持板的数量为四组,且沿着气缸夹爪的中心的均匀等距分布,所述固定夹持板与板料相互配合,所述固定夹持板用于夹持固定板料。
7.根据权利要求3所述的一种可交替抓取物料的机械抓手,其特征在于:所述电动吸盘的数量为三组,且沿着安装框顶部均匀等距分布,所述电动吸盘可吸附板料。
8.根据权利要求2所述的一种可交替抓取物料的机械抓手,其特征在于:所述气缸可以推拉气缸夹爪进行90度范围的转动,所述气缸夹爪的推拉可使夹持机构夹紧与收放。
技术总结
本技术涉及机械抓手技术领域,公开了一种可交替抓取物料的机械抓手,包括固定支撑臂机构,所述固定支撑臂机构的输出端转动连接有可交替对板料抓取的抓取机构,所述抓取机构包括用于固定夹持已加工板料的夹持机构和用于吸附已加工板料的吸附机构,本技术先将待加工的板料通过启动气缸夹爪,从而带动夹持机构便于对板料进行抓取,随后通过启动气缸,然后翻转90度,进而通过吸附机构抓取已经完成加工的板料,此时再度控制启动气缸,使得再次翻转90度,从而将待加工的板料放置在加工位置处,从而能够实现交替抓取板料,简单快捷,缩短了板料的位移时间,提高了对板料的加工效率。
技术研发人员:江波,陈国勇,黄飞
受保护的技术使用者:四川智目科技有限公司
技术研发日:20231206
技术公布日:2024/7/23
- 还没有人留言评论。精彩留言会获得点赞!