机械式无动力源夹具、线控机器人及其方法与流程
本发明属于智能制造的,特别是涉及机械式无动力源夹具、线控机器人及其方法。
背景技术:
1、目前工业机器人被广泛的使用在各行各业,工业机器人的末端执行器一般都是采用的工业夹爪,通过夹爪夹持住物品,再由机器人带动夹爪将物品移动到制定位置。
2、现有的夹爪是通过气缸、电缸、电机等驱动动力源控制夹爪的开合,因此在布设机械工装时,需要预留动力源所需的空间进行布线。除此之外,受应用场景的限定,针对不同的物品若夹爪选择不恰当,在运动中被因物品重心偏移或者其他原因导致夹爪被迫打开物品自落,不仅仅会造成物品的损坏、经济的损失,同时还会带来一定的安全问题。
技术实现思路
1、本发明为解决上述背景技术中存在的技术问题,提供机械式无动力源夹具以及方法、应用。
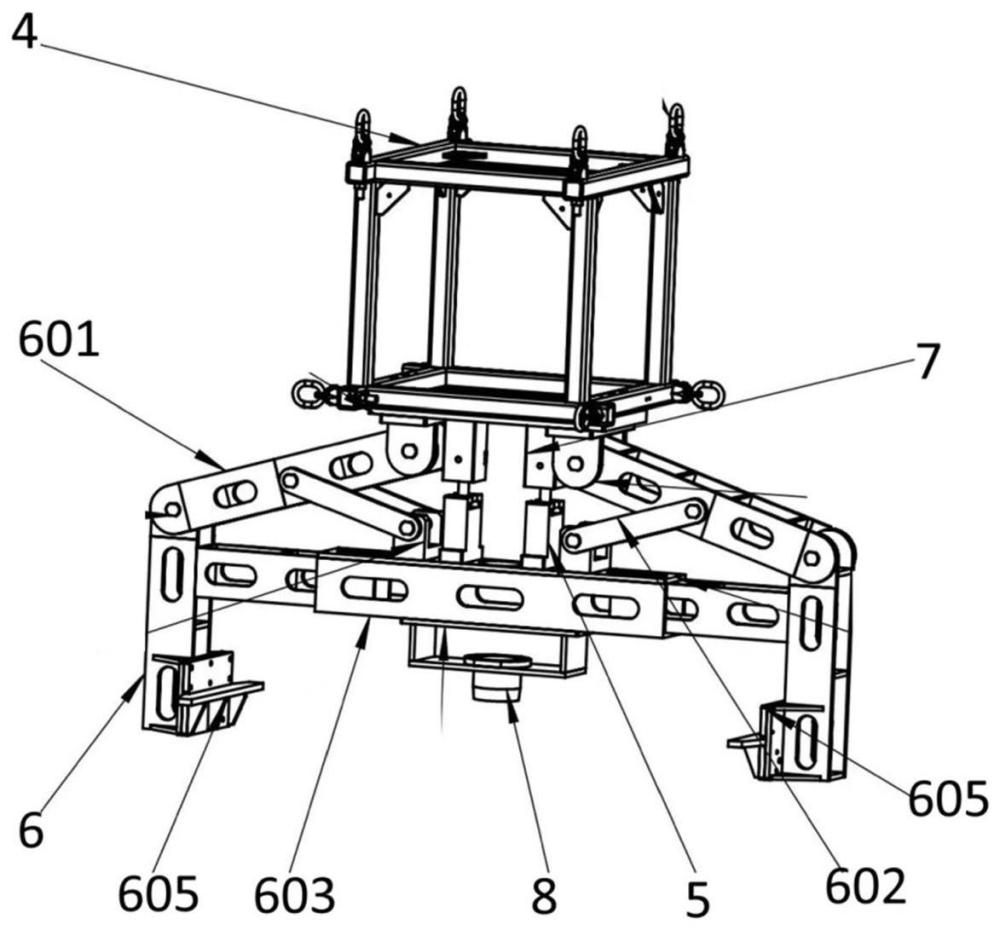
2、本发明采用以下技术方案:机械式无动力源夹具,设于载体上;所述夹具包括:用于连接所述载体的安装件;所述夹具还包括:
3、自锁模块,具有连接端和触发端;所述连接端设置在所述安装件上,
4、至少一组传动机构,按照需求分布在所述自锁模块的周边;每组传动机构均具有输入端和输出端,所述输入端铰接于所述自锁模块,输出端铰接有夹爪;
5、连接端与触发端之间发生周期性运动,所述周期性运动为连接端与触发端之间的相向运动和与之连贯的反向运动:相向运动时,所述夹具处于卸货状态;反向运动时,所述夹具为夹持状态。
6、在进一步的实施例中,连接端与触发端相对静止时,则保持夹具锁定在夹持状态。
7、在进一步的实施例中,所述自锁模块包括:
8、本体,安装在所述安装件上;所述本体的内部沿其长度方向开设有操作空间;所述操作空间内固定有沿径向设置的至少一组插件;
9、自锁块,活动设置在所述操作空间内;所述自锁块的外表面设置有滑槽;
10、连接件,可转动的安装在所述自锁块的底部;所述连接件用于连接触发端;
11、压缩弹簧,设于自锁块和安装件之间;
12、所述插件的活动端位于滑槽内,自锁块在滑槽和插件的配合下在周向具有旋转自由度,在长度方向具有往返自由度。
13、在进一步的实施例中,所述夹具为内夹式,则所述传动机构包括:
14、传动件,其一端铰接于自锁模块的连接端/安装件,另一端用于铰接夹爪;
15、可伸缩件,安装在所述触发端上;所述夹爪与可伸缩件的端部对应铰接;所述夹爪的内侧面设置有向外凸起的夹持部。
16、在进一步的实施例中,所述夹具为外持式,则所述传动机构包括:
17、传动件,其一端铰接于自锁模块的连接端/安装件,另一端用于固定夹爪;
18、固定件,安装在所述触发端上;所述夹爪与固定件的端部对应铰接;所述夹爪的外侧面设有向外凸起的卡接部。
19、在进一步的实施例中,所述触发端具有预定高度;
20、所述触发端直接作用于物品或者借助于辅助件作用于物品。
21、使用如上所述的机械式无动力源夹具的操作方法,包括以下步骤:
22、触发端受力,自锁模块被触发:触发端和连接端做相向运动,夹具为卸货状态;待张开到极限后,触发端和连接端做反向运动,夹具由卸货状态切换为夹持状态;相向运动的动力源由为物品给触发端的作用力,反向运动的动力源为自锁模块内的弹力或物品的重力;
23、卸货时,在夹具切换至夹持状态之前,夹具与物品发生脱离;夹持时,在夹具切换至夹持状态之前,夹具与物品完成接触。
24、在进一步的实施例中,夹具为内夹式时,夹具的卸货状态通过夹爪相对张开实现,夹持状态通过夹爪相对缩紧实现。
25、在进一步的实施例中,具为外持式时,夹具的卸货状态通过夹爪相对缩紧实现,夹持状态通过夹爪相对张开实现。
26、一种线控机器人,包括:至少一组桁架,按照需求布设于空中;
27、若干个导向件,按照需求分布于所述桁架上;每组导向件上均配置有至少一组执行线;
28、夹具,具有若干个连接点;所述执行线的末端选择性的连接于所述连接点;通过控制执行线的数量以及对应的长度实现夹具的空间调度和姿态调整;其中所述夹具如上所述。
29、本发明的有益效果:本发明研发了机械式无动力源夹具,将机械传动作为动力源取代了现有技术的电动,完全以来机械结构和机械传动,大大的增加了可靠性。结合自锁模块,巧妙的利用了力的作用实现了夹具的状态切换和状态保持,不仅仅降低了安装成本、工件成本,同时,状态保持的可靠性进一步得到保证,增加了安全系数。
技术特征:
1.机械式无动力源夹具,设于载体上;所述夹具包括:用于连接所述载体的安装件;其特征在于,所述夹具还包括:
2.根据权利要求1所述的机械式无动力源夹具,其特征在于,连接端与触发端相对静止时,则保持夹具锁定在夹持状态。
3.根据权利要求1所述的机械式无动力源夹具,其特征在于,所述自锁模块包括:
4.根据权利要求1所述的机械式无动力源夹具,其特征在于,所述夹具为内夹式,则所述传动机构包括:
5.根据权利要求1所述的机械式无动力源夹具,其特征在于,所述夹具为外持式,则所述传动机构包括:
6.根据权利要求1所述的机械式无动力源夹具,其特征在于,所述触发端具有预定高度;
7.使用如权利要求1至6中任意一项所述的机械式无动力源夹具的操作方法,其特征在于,包括以下步骤:
8.根据权利要求7所述的一种机械式无动力源夹具的操作方法,其特征在于,
9.根据权利要求7所述的一种机械式无动力源夹具的操作方法,其特征在于,具为外持式时,夹具的卸货状态通过夹爪相对缩紧实现,夹持状态通过夹爪相对张开实现。
10.一种线控机器人,其特征在于,包括:至少一组桁架,按照需求布设于空中;
技术总结
本发明公开了机械式无动力源夹具、线控机器人及其方法,属于智能制造的技术领域。所述夹具包括:具有连接端和触发端的自锁模块,自锁模块的周边等距离分布有至少一组传动机构。每组传动机构均具有输入端和输出端,所述输入端铰接于所述自锁模块,输出端铰接有夹爪;连接端与触发端之间发生周期性运动,所述周期性运动为连接端与触发端之间的相向运动和与之连贯的反向运动:相向运动时,所述夹具处于卸货状态;反向运动时,所述夹具为夹持状态。本发明巧妙的利用了力的作用实现了夹具的状态切换和状态保持,不仅仅降低了安装成本、工件成本,同时,状态保持的可靠性进一步得到保证,增加了安全系数。
技术研发人员:杨海,李松涛,王浩
受保护的技术使用者:南京线控机器人科技有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!