一种具有多种运动模式的人工肌肉纤维集束器件及方法与流程
本发明属于人工肌肉材料,具体涉及一种具有多种运动模式的人工肌肉纤维集束器件及方法。
背景技术:
1、人工肌肉是一类在外刺激源的作用下可以产生伸缩、膨胀、弯曲、扭转等一系列基本运动的柔性材料和器件的统称。电驱动人工肌肉可以响应外加电场,具有大形变、响应频率高、能量密度高、能量转换效率高等特点,是最有潜力的人工肌肉材料之一。基于电驱动人工肌肉开发的柔性机器人、微流控等装置在医疗服务、深海探测、军事侦察等领域具有广阔的应用前景。
2、规模化应用人工肌肉需要构建模块化集成的器件,即人工肌肉集束器件,以提高运动自由度,同时增加输出力、功率等的绝对值,如nicholas kellaris等(kellaris n,gopaluni venkata v, smith g m, et al. peano-hasel actuators: muscle-mimetic,electrohydraulic transducers that linearly contract on activation[j]. sciencerobotics, 2018, 3(14): eaar3276.)设计了一种电-液压转换驱动的人工肌肉基本单元,并将6个基本单元进行了堆叠得到集束器件,提升了输出力值,但是堆叠后的各个人工肌肉基本单元并不能单独控制,集束器件仅能整体收缩;chortos a 等研究者 (chortos a,mao j, mueller j, et al. printing reconfigurable bundles of dielectricelastomer fibers[j]. advanced functional materials, 2021, 31(22): 2010643.)报道了一种基于3d打印制备的人工肌肉纤维集束,并演示了伸长和循环旋转运动能力,但由于组成集束的基本单元运动能力的限制,无法实现电压驱动的主动收缩。
3、上述现有技术研究凸显出的已有人工肌肉纤维集束在多种运动模式、集束控制上的缺点,这极大地限制了人工肌肉纤维集束器件的实际应用和发展。
技术实现思路
1、本发明针对现有技术中存在的不足,提出了一种具有多种运动模式的人工肌肉纤维集束器件及方法。
2、为了实现上述目的,本发明提供了如下技术方案:
3、一种具有多种运动模式的人工肌肉纤维集束器件,主要由人工肌肉纤维基本单元、封装材料、电极接口和驱动控制系统组成;多根人工肌肉纤维基本单元采取串联或并联、串联和并联的方式集束,每根人工肌肉纤维基本单元均设有两根引线,通过引线将人工肌肉纤维基本单元接入电极接口;将多根人工肌肉纤维基本单元组成的人工肌肉纤维集束与电极接口通过封装材料进行封装,形成人工肌肉纤维集束器件;人工肌肉纤维集束器件通过驱动控制系统实现伸长、收缩、弯曲和扭转运动。
4、进一步地,所述人工肌肉纤维基本单元具有螺旋形纤维形态,其在外加电场作用下实现伸长和收缩运动。
5、进一步地,所述人工肌肉纤维基本单元的材料组成包括绝缘材料和柔性电极材料;所述绝缘材料包括聚偏氟乙烯、聚乙烯、聚丙烯、聚碳酸酯、聚甲基丙烯酸甲脂、聚酰胺、聚酰亚胺、天然橡胶、硅橡胶、丁苯橡胶、玻璃、石英等有机或无机材料中的一种或多种复合;所述柔性电极材料包括柔性电极、金属纳米线、碳纳米管、石墨烯、导电银浆、导电碳脂、液态金属、凝胶电极、导电胶带中的一种或多种。
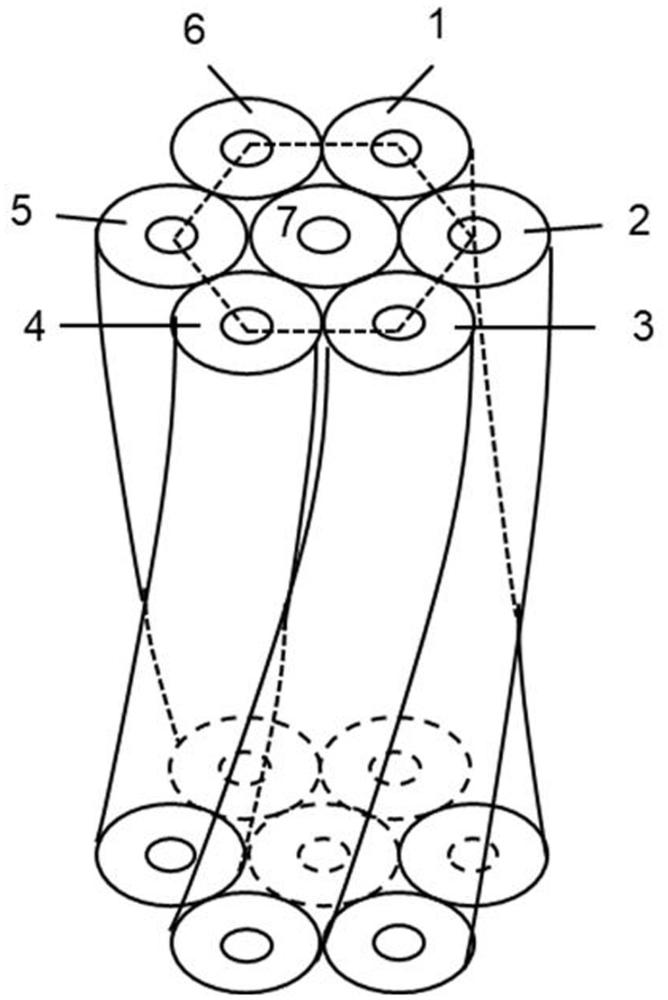
6、进一步地,所述人工肌肉纤维基本单元采取串联或/和并联方式;多根相同直径或者不同直径尺寸的人工肌肉纤维基本单元以平行排列、以六边形紧密堆砌排列、以大直径人工肌肉纤维基本单元嵌套一根或多根小直径人工肌肉纤维基本单元排列、以及组合排列;所述人工肌肉纤维基本单元采取并联方式集束时,其保持竖直、弯曲或扭转状态;所述人工肌肉纤维基本单元在弯曲状态时,其弯曲角度为0°-180°;所述人工肌肉纤维基本单元在扭转状态时,其扭转角度为0°-360°。
7、进一步地,所述电极接口为单独的人工肌肉纤维基本单元提供电压,而不受其余电极接口的影响;所述电极接口为单独的人工肌肉基本纤维单元提供的电压为-30kv至+30kv。
8、进一步地,所述封装材料内填充介电液、硅油、水凝胶、油凝胶和空气其中一种或多种;所述介电液包括变压器油、蓖麻子油、菜籽油;当封装材料以硅油、变压器油、蓖麻子油、菜籽油进行封装时,采用柔性橡胶膜包层;所述水凝胶或油凝胶的液体质量分数为1.0%-99.9%。
9、进一步地,所述驱动控制系统包含任意函数发生器、数据采集系统、高压放大器、lcr表和数字源表;所述驱动控制系统提供驱动电压时,人工肌肉纤维集束中的每根人工肌肉纤维基本单元单独控制其自身伸长或收缩,以实现集束整体的多种运动模式,包括收缩、伸长、弯曲和扭转;所述驱动控制系统通过在驱动电压信号中复合高频感知电信号实现检测,其中高频感知电信号的频率为1khz-1mhz、电压为0-1 v。
10、一种具有多种运动模式的人工肌肉纤维集束器件的制备方法,包括以下步骤:
11、(1)制备若干根人工肌肉纤维基本单元,每根人工肌肉纤维基本单元上设有两根引线;
12、(2)将步骤(1)制备得到的人工肌肉纤维基本单元采取串联或/和并联方式集束,得到人工肌肉纤维集束;其中,若干根螺旋直径相同或不同的纤维基本单元以平行排列、多边形紧密堆砌排列、以大直径人工肌肉纤维基本单元嵌套一根或若干根小直径人工肌肉纤维基本单元排列、以及组合排列;排列组合中,人工肌肉纤维基本单元保持竖直、弯曲或扭转状态;
13、(3)将人工肌肉纤维集束中的每根人工肌肉纤维基本单元的两根引线接入电极接口;
14、(4)将人工肌肉纤维集束和电极引线整体用封装材料进行封装,得到可驱动的人工肌肉纤维集束器件。
15、一种具有多种运动模式的人工肌肉纤维集束器件在制备智能驱动装置和机构中的应用。
16、进一步地,所述智能驱动装置和机构包括柔性机器人、类人机器人、智能假肢、管道机器人和水下机器人。
17、与现有技术相比,本发明具有以下有益效果:
18、1、相比于现有的纤维形人工肌肉,本发明公开的电驱动人工肌肉纤维集束的基本组成单元为螺旋形态纤维,可实现纤维基本单元的单独控制和协同;集束器件可以实现更多的运动模式如伸长、收缩、弯曲、扭转,实现更多的运动自由度。
19、2、相比于现有的电驱动人工肌肉集束,本发明具有应变自反馈能力,可以实现更好的运动精准性和操控性。
20、3、相比于现有的电驱动人工肌肉,本发明通过外部封装使其具有电学自修复特性,极大提高了电学稳定性,不容易发生高压击穿失效,适用于类人机器人、智能假肢等应用。
21、4、相比于已有的人工肌肉纤维集束器件的制备方法,本发明公开的制备方法可实现人工肌肉纤维的长距离连续制造,具有更强的微结构设计能力和和电学稳定性。
技术特征:
1.一种具有多种运动模式的人工肌肉纤维集束器件,其特征在于,主要由人工肌肉纤维基本单元、封装材料、电极接口和驱动控制系统组成;多根人工肌肉纤维基本单元采取串联或并联、串联和并联的方式集束,每根人工肌肉纤维基本单元均设有两根引线,通过引线将人工肌肉纤维基本单元接入电极接口;将多根人工肌肉纤维基本单元组成的人工肌肉纤维集束与电极接口通过封装材料进行封装,形成人工肌肉纤维集束器件;人工肌肉纤维集束器件通过驱动控制系统实现伸长、收缩、弯曲和扭转运动。
2.根据权利要求1所述的具有多种运动模式的人工肌肉纤维集束器件,其特征在于,所述人工肌肉纤维基本单元具有螺旋形纤维形态,其在外加电场作用下实现伸长和收缩运动。
3.根据权利要求1所述的具有多种运动模式的人工肌肉纤维集束器件,其特征在于,所述人工肌肉纤维基本单元的材料组成包括绝缘材料和柔性电极材料;所述绝缘材料包括聚偏氟乙烯、聚乙烯、聚丙烯、聚碳酸酯、聚甲基丙烯酸甲脂、聚酰胺、聚酰亚胺、天然橡胶、硅橡胶、丁苯橡胶、玻璃、石英的有机或无机材料中的一种或多种复合;所述柔性电极材料包括柔性电极、金属纳米线、碳纳米管、石墨烯、导电银浆、导电碳脂、液态金属、凝胶电极、导电胶带中的一种或多种。
4.根据权利要求1所述的具有多种运动模式的人工肌肉纤维集束器件,其特征在于,所述人工肌肉纤维基本单元采取串联或/和并联方式;多根相同直径或者不同直径尺寸的人工肌肉纤维基本单元以平行排列、以六边形紧密堆砌排列、以大直径人工肌肉纤维基本单元嵌套一根或多根小直径人工肌肉纤维基本单元排列、以及组合排列;所述人工肌肉纤维基本单元采取并联方式集束时,其保持竖直、弯曲或扭转状态;所述人工肌肉纤维基本单元在弯曲状态时,其弯曲角度为0°-180°;所述人工肌肉纤维基本单元在扭转状态时,其扭转角度为0°-360°。
5.根据权利要求1中所述的具有多种运动模式的人工肌肉纤维集束器件,其特征在于,所述电极接口为单独的人工肌肉纤维基本单元提供电压,而不受其余电极接口的影响;所述电极接口为单独的人工肌肉基本纤维单元提供的电压为-30kv至+30kv。
6.根据权利要求1中所述的具有多种运动模式的人工肌肉纤维集束器件,其特征在于,所述封装材料内填充介电液、硅油、水凝胶、油凝胶和空气其中一种或多种;所述介电液包括变压器油、蓖麻子油、菜籽油;当封装材料以硅油、变压器油、蓖麻子油、菜籽油进行封装时,采用柔性橡胶膜包层;所述水凝胶或油凝胶的液体质量分数为1.0%-99.9%。
7.根据权利要求1中所述的具有多种运动模式的人工肌肉纤维集束器件,其特征在于,所述驱动控制系统包含任意函数发生器、数据采集系统、高压放大器、lcr表和数字源表;所述驱动控制系统提供驱动电压时,人工肌肉纤维集束中的每根人工肌肉纤维基本单元单独控制其自身伸长或收缩,以实现集束整体的多种运动模式,包括收缩、伸长、弯曲和扭转;所述驱动控制系统通过在驱动电压信号中复合高频感知电信号实现检测,其中高频感知电信号的频率为1khz-1mhz、电压为0-1 v。
8.一种如权利要求1-7中任一项所述的具有多种运动模式的人工肌肉纤维集束器件的制备方法,其特征在于,包括以下步骤:
9.一种权利要求1-7任一项所述的具有多种运动模式的人工肌肉纤维集束器件在制备智能驱动装置和机构中的应用。
10.根据权利要求9所述的应用,其特征在于,所述智能驱动装置和机构包括柔性机器人、类人机器人、智能假肢、管道机器人和水下机器人。
技术总结
本发明公开了一种具有多种运动模式的人工肌肉纤维集束器件及方法;该人工肌肉纤维集束器件组成包括螺旋形人工肌肉纤维基本单元、封装材料、电极接口和驱动控制系统;人工肌肉纤维基本单元可响应外加电场而伸长或收缩;多根人工肌肉纤维基本单元采取并联或串联结合、并联和串联结合的方式集束,并将每根基本单元的两根引线接入电极接口,最终整体封装制备成人工肌肉纤维集束器件。本发明提供的人工肌肉纤维集束器件可通过驱动控制系统完成对单根纤维基本单元的协同控制,实现集束的伸长、收缩、弯曲和扭转运动模式,同时具有应变自感知、高电学稳定性等特点,适用于柔性机器人、类人机器人、智能假肢、管道机器人、水下机器人等应用场景。
技术研发人员:马志军,李恒毅,瞿瑞祥,陈福广,梁艺鸣,张利昂,宋晓珂,马思远,冯雪
受保护的技术使用者:之江实验室
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!