一种服务型搬运机器人以及控制系统
本发明涉及搬运机器人,具体为一种服务型搬运机器人以及控制系统。
背景技术:
1、搬运机器人为应用机器人运动轨迹实现代替人工搬运的自动化产品,搬运机器人可安装不同的末端执行器以完成各种不同形状和状态的工件搬运工作,大大减轻了人类繁重的体力劳动。世界上使用的搬运机器人逾10万台,被广泛应用于机床上下料、冲压机自动化生产线、自动装配流水线、码垛搬运、集装箱等的自动搬运。部分发达国家已制定出人工搬运的最大限度,超过限度的必须由搬运机器人来完成,现有的搬运机器人功能比较单一,灵活性较差,适应领域较少,而且现有的搬运机器人工作效率低,制造成本高,控制系统繁琐复杂,不能提高机器人的稳定性能,操作繁琐复杂,不方便人们使用,为此提供了一种服务型搬运机器人以及控制系统。
技术实现思路
1、本发明的目的是针对现有技术的缺陷,提供一种服务型搬运机器人以及控制系统,以解决上述背景技术提出的问题。
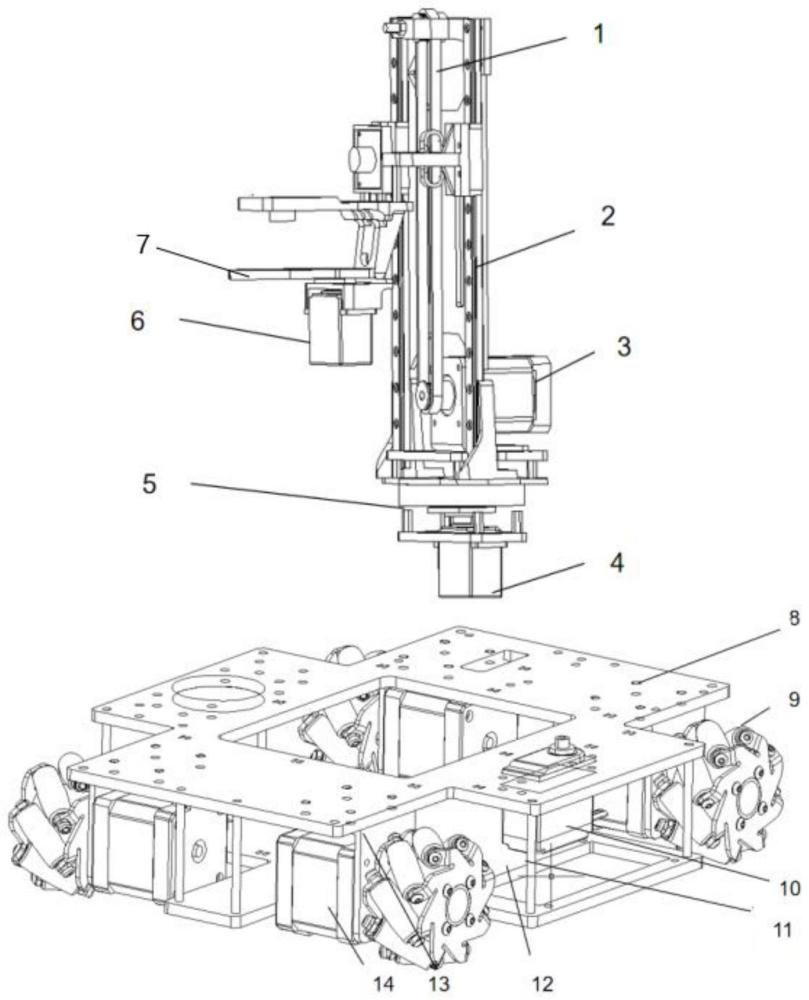
2、为实现上述目的,本发明提供如下技术方案:一种服务型搬运机器人以及控制系统,包括上底板、下底板和滑轨机构,所述上底板和下底板之间通过若干个铜柱相连构成机器人底座,所述机器人底座的四个拐角处均安装有电机支架,所述电机支架上安装有第二步进电机,所述第二步进电机上安装有麦克纳姆轮,所述机器人底座上还安装有第一舵机、第三舵机和控制箱,所述第一舵机的顶部与减速箱相连,所述减速箱安装在滑轨机构的底部上,所述滑轨机构的两侧均设有滑轨,所述滑轨上设有滑块,所述滑块上安装有连接架,所述连接架上安装有第二舵机,所述第二舵机的顶部安装有夹爪,所述滑轨机构的底部一侧安装有第一步进电机,所述第一步进电机的转轴上设有皮带。
3、作为本发明的一种优选技术方案,所述上底板和下底板与若干个铜柱固定相连,所述电机支架通过螺栓安装在上底板和下底板上,所述上底板和下底板采用1cm亚克力板制成。
4、作为本发明的一种优选技术方案,所述第二步进电机通过螺栓安装在电机支架上,所述麦克纳姆轮通过螺母固定在第二步进电机的转轴上。
5、作为本发明的一种优选技术方案,所述第一舵机和减速箱均通过螺栓安装在机器人底座上,所述第一舵机的转轴和减速箱内的齿轮通过联轴器相连。
6、作为本发明的一种优选技术方案,所述滑轨机构的底部与减速箱内的齿轮相连,所述第一步进电机通过螺栓安装在滑轨机构上,所述滑轨机构的顶部安装有皮带轴承,所述第一步进电机转轴上的皮带与滑块相连。
7、作为本发明的一种优选技术方案,所述滑块与滑轨活动相连,所述第二舵机通过螺栓安装在连接架上,所述第二舵机的顶部安装有齿轮箱,所述齿轮箱的顶部与夹爪尾部的夹爪齿轮相连,所述夹爪设有两个,两个夹爪上的夹爪齿轮啮合相连,夹爪采用fdm材料通过3d打印制成。
8、作为本发明的一种优选技术方案,所述第三舵机通过螺栓安装在机器人底座上,所述第三舵机的转轴上安装有载物托盘,所述第三舵机和载物托盘构成货舱机构,所述货舱机构采用倾斜式设计,所述载物托盘采用fdm材料通过3d打印制成。
9、作为本发明的一种优选技术方案,所述控制箱的内部设有基于cortex-m432位处理器的stm32f407单片机,所述滑轨机构上安装有摄像头,所述机器人底座上安装有陀螺仪传感器,所述摄像头通过数据线与linux上位机进行串口通讯。
10、一种服务型搬运机器人的控制系统,包括速度控制模块、夹爪控制模块、滑轨控制模块、二维码采集模块、路径规划模块;
11、所述二维码采集模块用于摄像头拍摄二维码信息,并将二维码信息传输到主控芯片内;
12、所述路径规划模块用于主控芯片将物料颜色摆放顺序、物料抓取顺序、物料放置区的颜色三者进行比对后进行路径规划;
13、所述滑轨控制模块用于对第一步进电机和第一舵机进行控制,调节夹爪高度和角度;
14、所述夹爪控制模块用于对第二舵机进行控制,从而实现夹爪对物品的夹取和放下;
15、所述速度控制模块采用两个闭环系统控制:其一,使用闭环的第二步进电机进行机器人位置闭环,其中使用陀螺仪模块矫正的方式来对跑偏的情况进行回正;其二,使用pid控制算法对机器人第二步进电机的转速进行闭环控制,使其保持直线的运动。
16、本发明的有益效果是:本发明的应用场景广泛,包括物流和仓储、医疗机构、酒店和餐饮业、购物中心和商场、工业生产线,以及酒店和公寓楼等;可以有效提高工作效率,减轻人力负担,并为用户提供便利和舒适的服务体验。
17、机器人的大多零件是标准件,可以购买,同时除部分需要加工精度高的采用特殊加工外,其余部分可通过3d打印制备,成本低廉,电路部分选择市面上较为成熟的电路模块进行使用,以达到快速高效进入开发的目的。
技术特征:
1.一种服务型搬运机器人,包括上底板(8)、下底板(12)和滑轨机构(15),其特征在于:所述上底板(8)和下底板(12)之间通过若干个铜柱(11)相连构成机器人底座,所述机器人底座的四个拐角处均安装有电机支架(13),所述电机支架(13)上安装有第二步进电机(14),所述第二步进电机(14)上安装有麦克纳姆轮(9),所述机器人底座上还安装有第一舵机(4)、第三舵机(10)和控制箱,所述第一舵机(4)的顶部与减速箱(5)相连,所述减速箱(5)安装在滑轨机构(15)的底部上,所述滑轨机构(15)的两侧均设有滑轨(2),所述滑轨(2)上设有滑块(16),所述滑块(16)上安装有连接架(17),所述连接架(17)上安装有第二舵机(6),所述第二舵机(6)的顶部安装有夹爪(7),所述滑轨机构(15)的底部一侧安装有第一步进电机(3),所述第一步进电机(3)的转轴上设有皮带(1)。
2.根据权利要求1所述的一种服务型搬运机器人,其特征在于:所述上底板(8)和下底板(12)与若干个铜柱(11)固定相连,所述电机支架(13)通过螺栓安装在上底板(8)和下底板(12)上,所述上底板(8)和下底板(12)采用1cm亚克力板制成。
3.根据权利要求1所述的一种服务型搬运机器人,其特征在于:所述第二步进电机(14)通过螺栓安装在电机支架(13)上,所述麦克纳姆轮(9)通过螺母固定在第二步进电机(14)的转轴上。
4.根据权利要求1所述的一种服务型搬运机器人,其特征在于:所述第一舵机(4)和减速箱(5)均通过螺栓安装在机器人底座上,所述第一舵机(4)的转轴和减速箱(5)内的齿轮通过联轴器相连。
5.根据权利要求1所述的一种服务型搬运机器人,其特征在于:所述滑轨机构(15)的底部与减速箱(5)内的齿轮相连,所述第一步进电机(3)通过螺栓安装在滑轨机构(15)上,所述滑轨机构(15)的顶部安装有皮带轴承,所述第一步进电机(3)转轴上的皮带(1)与滑块(16)相连。
6.根据权利要求1所述的一种服务型搬运机器人,其特征在于:所述滑块(16)与滑轨(2)活动相连,所述第二舵机(6)通过螺栓安装在连接架(17)上,所述第二舵机(6)的顶部安装有齿轮箱,所述齿轮箱的顶部与夹爪(7)尾部的夹爪齿轮相连,所述夹爪(7)设有两个,两个夹爪(7)上的夹爪齿轮啮合相连,夹爪(7)采用fdm材料通过3d打印制成。
7.根据权利要求1所述的一种服务型搬运机器人,其特征在于:所述第三舵机(10)通过螺栓安装在机器人底座上,所述第三舵机(10)的转轴上安装有载物托盘,所述第三舵机(10)和载物托盘构成货舱机构,所述货舱机构采用倾斜式设计,所述载物托盘采用fdm材料通过3d打印制成。
8.根据权利要求1所述的一种服务型搬运机器人,其特征在于:所述控制箱的内部设有基于cortex-m432位处理器的stm32f407单片机,所述滑轨机构(15)上安装有摄像头,所述机器人底座上安装有陀螺仪传感器,所述摄像头通过数据线与linux上位机进行串口通讯。
9.一种如权利要求1所述的服务型搬运机器人的控制系统,其特征在于:包括速度控制模块、夹爪控制模块、滑轨控制模块、二维码采集模块、路径规划模块;
技术总结
本发明公开了一种服务型搬运机器人以及控制系统,包括上底板、下底板和滑轨机构,所述上底板和下底板之间通过若干个铜柱相连构成机器人底座,所述机器人底座的四个拐角处均安装有电机支架,所述电机支架上安装有第二步进电机,所述第二步进电机上安装有麦克纳姆轮,所述机器人底座上还安装有第一舵机、第三舵机和控制箱,所述第一舵机的顶部与减速箱相连,所述减速箱安装在滑轨机构的底部上,本发明的应用场景广泛,包括物流和仓储、医疗机构、酒店和餐饮业、购物中心和商场、工业生产线,以及酒店和公寓楼等。可以有效提高工作效率,减轻人力负担,并为用户提供便利和舒适的服务体验。
技术研发人员:尚峰,曹帅,张鹏,江雨博,黄俊辉,刘浩,李磊,朱阳,刘俊俊,包灵辉,王源振
受保护的技术使用者:江苏海洋大学
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!