一种基于命令滤波器的单连杆机械臂预定时间控制方法
本发明涉及一种预定时间控制方法,具体涉及一种基于命令滤波器单连杆机械臂预定时间控制方法。
背景技术:
1、随着智能时代的到来,机械臂凭借其自身的独特优势,广泛应用于实际生活的不同领域,从精密零件的加工,到生产流水线任务,再到军事制造等。考虑到机械臂执行器动态,电驱动因具有易获取能源、灵敏度高、精度高等优点,特别是直流电机驱动的机械臂受到越来越多的重视。
2、目前,越来越多的人对机械臂系统的跟踪控制问题进行研究。为了达到更高的性能要求,学者们研究了各种改善瞬态或稳态性能以及鲁棒性能的方法,如基于pid的跟踪控制方法、基于自适应的跟踪控制方法、基于滑膜变结构的控制方法、基于backstepping技术的跟踪控制方法等。
3、但在实际生产中,机械臂的关节变量乃至速度变量都必然受到环境、结构和应用的影响,若不能保持在限定的范围内,可能会导致系统性能受损。目前,已有大量文献描述非线性系统的预定性能控制,但计算繁琐,不利于广泛应用且无法做到任意设置收敛时间。如何提供一种计算简单且跟踪精确的单连杆机械手臂控制方法,成为一个亟待解决的技术问题。
技术实现思路
1、发明目的:为了克服已有技术上的不足,本发明提出一种基于命令滤波器的单连杆机械臂预定时间控制方法,结合命令滤波器、预定性能控制、预定时间控制、反步递推设计,确保电驱动单连杆机械臂的跟踪控制轨迹在预定时间内满足预先设定的性能指标,进而提高机械臂的控制精度及快速收敛速度。
2、技术方案:本发明公开了一种基于命令滤波器的单连杆机械臂预定时间控制方法,基于命令滤波器的状态约束非线性系统的全局预定时间控制和预设性能控制策略,包括以下步骤:
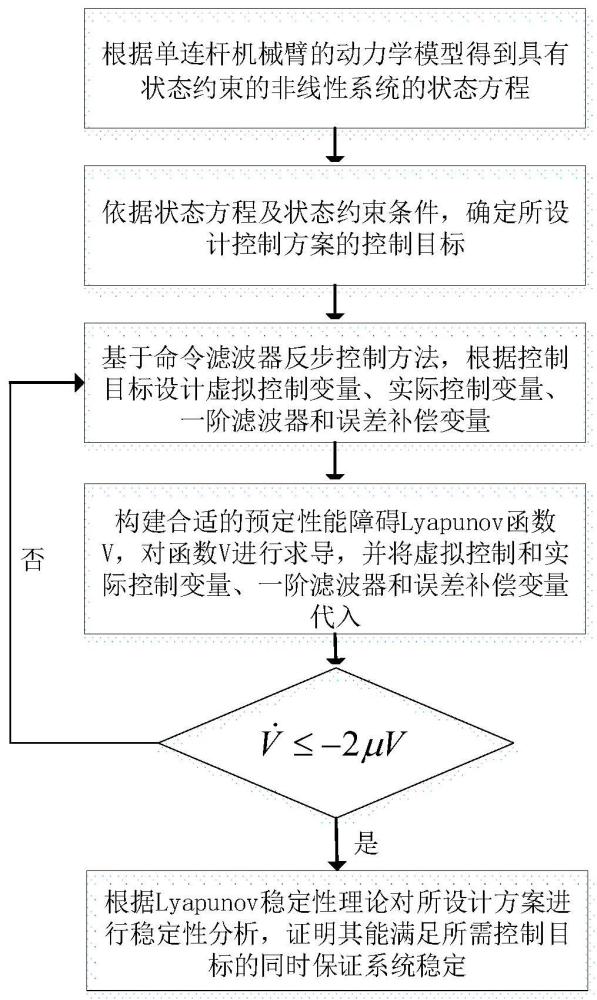
3、步骤1:利用欧拉-拉格朗日动力学模型描述单连杆机械臂的动力学方程,根据动力学方程得到具有状态约束的非线性系统的状态方程;
4、步骤2:依据状态方程及状态约束条件,确定所设计控制方案的控制目标为:保证闭环系统中所有变量在预定时间内收敛到零,且跟踪控制性能在预定时间内满足预先设定的性能指标;
5、步骤3:根据非线性系统的状态方程设计误差变量,并基于命令滤波器反步方法进行递推设计,根据步骤2的控制目标设计虚拟控制变量、实际控制输入、一阶滤波器和误差补偿变量;
6、步骤4:设计预定时间性能函数ptpf,结合障碍lyapunov函数blf构建预定性能障碍lyapunov函数v,对函数v进行求导,并将所设计的虚拟控制变量、实际控制输入、一阶滤波器和误差补偿变量代入,验证其是否满足预定时间稳定性判据其中为时变函数,ts为预定时间,为标量且满足若满足,则所设计控制方案能够实现整个闭环系统的全局预定时间稳定;若不满足,需要重新设计控制变量、实际控制输入、一阶滤波器和误差补偿变量,直至不等式成立;
7、步骤5:根据lyapunov稳定性理论对所设计的全局预定时间收敛控制方案进行稳定性分析,证明步骤3和步骤4的方法能够保证整个闭环系统的控制轨迹在预定时间内全局收敛,且满足预先设定的性能指标。
8、进一步地,所述步骤1中,具有状态约束的非线性系统的状态方程表示如下:
9、1)单连杆机械臂动力学方程为:
10、
11、
12、其中,j表示转子惯性,q,分别为单连杆机械臂连杆的角位置、角速度、角加速度,m,m0分别是连杆质量和负载质量,l0,r0分别代表连杆长度和负载半径,i,l,r分别为单连杆机械臂电机的电枢电流、电枢电感和电枢电阻,g,b0,kτ,kb分别表示重力系数、粘性摩擦系数、转换系数和反电动势系数,v0表示输入电压;
13、2)根据动力学方程公式(1)得到具有状态约束的非线性系统的状态方程为:
14、
15、其中,y∈r表示系统输出;表示系统状态;v0∈r表示控制输入;为已知光滑连续函数;所有的状态变量满足不等式关系为:|q|≤cq1,|i|≤ci,cq1,cq2,ci>0均为待设计参数;
16、进一步地,所述步骤2中设计控制方案的控制目标为:
17、目标1:确保闭环系统中的所有信号的全局预定时间稳定性,其中预定时间ts可以根据设计参数任意选择;
18、目标2:输出信号y(t)在预定时间ts内实现期望轨迹yb(t)的预先指定的跟踪,其不受任何系统参数或初始条件的影响;
19、目标3:可以满足所需的预设性能指标,同时确保所有状态变量不违反约束条件。
20、进一步地,所述步骤3中根据控制目标拟设计的误差变量、虚拟控制变量、实际控制输入、一阶滤波器和误差补偿变量具体为:
21、设计误差变量为:
22、e1=q-yb,
23、
24、
25、
26、其中,e1,e2,e3表示误差变量,表示系统状态,是一阶滤波器的输出,ζr,分别表示补偿变量和补偿误差变量,yb是期望轨迹且满足|yb|≤c0,1,c0,1,c0,2>0是常数;
27、设计虚拟控制变量和实际控制输入为:
28、其中
29、其中
30、
31、其中
32、
33、其中,分段函数h(t):r→{0,1}被定义为为了简化符号表示,我们将省略函数的参数,使用h代替h(t);为时变函数,ts为预定时间,为标量且满足时变增益pk(t)为预定时间性能函数,分别为预定时间性能函数的平方和一阶导数的平方,θk,ιk>0均为待设计参数;ki,1>0为待设计参数,i=1,2,3;j表示转子惯性,m,m0分别是连杆质量和负载质量,l0,r0分别代表连杆长度和负载半径,g,b0,kτ分别表示重力系数、粘性摩擦系数、转换系数;
34、设计一阶滤波器和误差补偿变量为:
35、
36、
37、
38、其中,δk+1>0是时间参数,ζk表示补偿变量,xk,d,分别是滤波器的输入和输出;
39、进一步地,所述步骤4中,具体包括以下步骤:
40、(41)构建的预定时间性能函数为:
41、
42、其中,lk,ξk,pk,0,是正参数,初始值为函数的收敛时间
43、(42)结合障碍李亚普诺夫函数,设计出如下预定性能障碍lyapunov函数v为:
44、
45、其中,pi为pi(t)的缩写,为预定时间性能函数;
46、(43)根据具有状态约束的非线性系统的状态方程与e1=q-yb,求误差变量e1关于时间t的导数,得到:
47、
48、将分段函数h(t)定义为如下形式:
49、
50、设计第1个虚拟控制x1,d为:
51、
52、其中,为时变函数,ts为预定时间,为标量且满足时变增益为θ1,ι1>0均为待设计的正常数,p1(t)为预定时间性能函数,分别为预定时间性能函数的平方和一阶导数的平方,为补偿误差变量,k1,1>0为待设计参数;
53、根据设计的虚拟控制x1,d来构造一个时间常数为δ2的一阶滤波器,即:
54、
55、其中,δ2>0,x1,d,分别是滤波器的输入和输出;
56、引入一个新的补偿信号ζ1,其表达式如下:
57、
58、设计如下所示的正定lyapunov函数:
59、
60、当0≤t<ts时,对v1进行求导,可得:
61、
62、根据可以得到因此式(7)改写为:
63、
64、其中,
65、(44)根据具有状态约束的非线性系统的状态方程与求误差变量e2的关于时间t的导数,得到:
66、
67、设计第2个虚拟控制x2,d为:
68、
69、其中,为时变函数,ts为预定时间,为标量且满足时变增益为θ1,θ2,ι2>0均为待设计的正常数,p2(t)为预定时间性能函数,分别为预定时间性能函数的平方和一阶导数的平方,为补偿误差变量,k2,1>0为待设计参数;j表示转子惯性,m,m0分别是连杆质量和负载质量,l0,r0分别代表连杆长度和负载半径,g,b0,kτ分别表示重力系数、粘性摩擦系数、转换系数;
70、根据所设计的虚拟控制x2,d来构造一个时间常数为δ3的一阶滤波器,即:
71、
72、其中,δ3>0,x2,d,分别是滤波器的输入和输出;
73、引入一个新的补偿信号ζ2,其表达式如下:
74、
75、设计如下所示的第二个正定lyapunov函数:
76、
77、当0≤t<ts时,考虑到和等式(10)-(12),v2关于时间t的导数,可表示为:
78、
79、其中,
80、(25)求v3关于时间t的导数,计算得到表示为:
81、
82、其中,
83、进一步地,所述步骤5中,分析验证过程包括:
84、整个闭环系统的预定性能障碍lyapunov函数为:
85、
86、根据log函数的定义和性质,有:
87、
88、当t∈[0,ts)时,根据式(16),再对v的时间导数进行代数运算,可得:
89、
90、计算化简式(19)得到:
91、
92、其中,根据式(19)可知,当t→∞时,选取的lyapunov函数v(t)→0,故可知
93、根据式(16)和式(19),易得不等式进一步得到如下关系:
94、
95、根据挤压原理,得到利用式(7)和连续函数的特性,推导出x1,d在时间ts上是连续的,由于是由x1,d通过所设计的滤波器得到的,进一步推断出在t=ts时是连续的;此外,由于因此在t=ts时也是连续;类似的,得出x3,d,在时间ts上是连续的。
96、对于t≥ts,所有控制变量xr,d,r=1,2,3都是连续函数,这意味着v(ts)=0,根据式(18),进一步推断出在t≥ts时v(t)=0,根据式(5)、(12),得出ζr在t≥ts时连续,由于因此,推断出对于任意t≥ts,er,xr是连续有界的;
97、由上述理论分析和连续函数的特点可知,所有闭环系统信号e1,e2,e3,x1,d,x2,d,x3,d,ζ1,ζ2,ζ3,在预定时间段内都是有界的。考虑到闭环系统的全局稳定性和预定时间性能函数p(t)的性质,确保变量在以±pr为上下界的预定时间性能函数域内,即对于任何给定的跟踪误差χ1>0,通过选择合适的参数,使得不等式成立,这意味着跟踪误差e1能被限制在预定范围内,达到预设的性能指标;根据参考轨迹满足|yb|≤c0,1,使从而保证状态约束|q|≤cq1不会被违反。类似的,满足约束条件满足约束条件|i|<ci,通过上述的分析,证明了本发明提出的控制方法能够实现电驱动机械臂的跟踪控制在预定义时间内满足预定性能指标,如跟踪误差、收敛速度,且不违反系统的约束条件。至此,基于命令滤波器的单连杆机械臂的预定时间控制策略实现了所有控制目标。
98、有益效果:
99、本发明提出了一种针对非线性系统的预定时间控制策略,该策略将预定时间控制与命令滤波器反步的递归设计相结合,能够实现电驱动机械臂的跟踪控制在预定时间内满足预设性能指标,实现基于设计指标的预设收敛时间,同时确保满足所需的预定性能指标和约束条件。与现有结果相比,本文减轻了关于跟踪信号假设的保守性,只要求跟踪信号及其相对于时间的一阶导数是有界的。此外,命令滤波器的设计消除了证明虚函数高阶导数连续性的要求。
- 还没有人留言评论。精彩留言会获得点赞!