一种空间七自由度机械臂的悬吊卸载系统及方法与流程
本发明涉及航天器地面试验,特别涉及一种空间七自由度机械臂的悬吊卸载系统及方法。
背景技术:
1、空间机械臂是最常见的空间灵巧机械臂,可代替代航天员完成大量危险、耗时的舱外活动,用于实现对小型设备的灵巧操作,而空间机械臂通常是在失重的环境下进行工作,在地面上需要对机械臂进行卸载重力再进行各项的实验验证。
2、目前常用的空间机械臂的重力卸载技术主要有导轨悬挂式和气浮支撑式等,但这些方法只适用于二维空间,或者在三维空间进行简单机械臂单机操控试验。而空间灵巧操控,如燃料加注,故障维护维修等需要更精确和更灵巧的地面验证技术,需要空间机械臂在三维空间内实现重力卸载,进行闭环操控试验,验证相关控制技术与方法。
3、基于此,目前亟需一种空间七自由度机械臂的悬吊卸载系统及方法来解决上述技术问题。
技术实现思路
1、为了有效提高空间机械臂在三维空间的重力卸载精度,为系统级试验奠定基础,本发明实施例提供了一种空间七自由度机械臂的悬吊卸载系统及方法。
2、第一方面,本发明实施例提供了一种空间七自由度机械臂的悬吊卸载系统,包括:
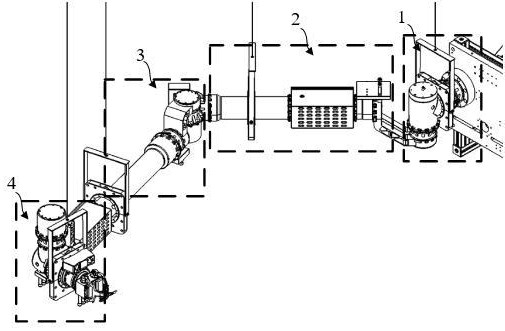
3、按配重后各个部分质心位置在关节转动中不变原则,将空间机械臂划分四个等效部分,分别为第一工作部分、第二工作部分、第三工作部分和第四工作部分;空间机械臂以及沿空间机械臂延伸方向依次设置四个吊环和七个配重。
4、所述第一工作部分的第一配件组包括安装口、法兰、第一关节定子、第一关节转子和第二关节定子,第一配重设置于所述第二关节定子相对所述第一关节定子所在轴线的对称位置;
5、所述第二工作部分的第二配件组包括第二关节转子、第三关节定子、第三关节转子和第四关节定子,第二配重设置于所述第二关节转子相对所述第三关节定子所在轴线的对称位置,第三配重设置于所述第四关节定子相对所述第三关节定子所在轴线的对称位置;
6、所述第三工作部分的第三配件组包括第四关节转子、第五关节定子、第五关节转子和第六关节定子,第四配重设置于所述第四关节转子相对所述第五关节定子所在轴线的对称位置,第五配重设置于所述第六关节定子相对第五关节定子所在轴线的对称位置;
7、所述第四工作部分的第四配件组包括第六关节转子、第七关节定子、第七关节转子、末端工具和手眼相机,第六配重设置于所述第六关节转子相对所述第七关节定子所在轴线的对称位置,第七配重设置于所述手眼相机相对所述第七关节定子所在轴线的对称位置;
8、四个所述吊环依次设置于每一个所述工作部分的质心所在位置,用于卸载每一个所述工作部分的重力,以使每个所述工作部分均处于失重状态。
9、优选地,还包括仿真计算机,计算每个配重的重量、每个所述工作部分的质心的等效位置和每个所述工作部分的卸载力。
10、优选地,所述仿真计算机是通过如下方式进行计算的:
11、基于每个所述工作部分,依次得到每一个所述配重的质量;
12、对每个所述工作部分的质量静矩进行计算,依次得到每一个所述工作部分的质心的等效位置;
13、对每个所述工作部分的质量和每个所述吊环的质量进行计算,依次得到每一个所述工作部分的卸载力。
14、优选地,所述仿真计算机在执行所述基于每个所述工作部分,依次得到每一个所述配重的重量时,用于执行如下操作:
15、
16、
17、
18、
19、
20、
21、
22、式中, m1至 m7依次为第一配重至第七配重的重量; m1为第一关节转子的质量; m2为第二关节定子的重量; l1为第一关节转子和第二关节定子相对第一关节定子轴线的距离; l2为第一配重到第一关节定子轴线的距离; m3为第二关节转子的质量; l3为第二关节转子相对第三关节定子轴线的距离; l4为第二配重到第三关节定子轴线的距离; m4为第三关节转子的质量; m5为第四关节定子的重量; l5为第三关节转子和第四关节定子相对第三关节定子轴线的距离; l6为第三配重到第三关节定子轴线的距离; m6为第四关节转子的质量; l7为第四关节转子相对第五关节定子轴线的距离; l8为第四配重到第五关节定子轴线的距离; m7为第六关节定子的质量; l9为第六关节定子相对第五关节定子轴线的距离; l10为第五配重到第五关节定子轴线的距离; m8为第六关节转子的质量; m9为第七关节定子的重量; l11为第六关节转子和第七关节定子相对第七关节定子轴线的距离; l12为第六配重到第七关节定子轴线的距离; m10为手眼相机的重量; l13为手眼相机相对第七关节转子轴线的距离; l14为第七配重到第七关节转子轴线的距离。
23、优选地,每个所述工作部分均为恒力部分。
24、优选地,每个所述工作部分的质心的位置在所述空间机械臂转动时均保持不变。
25、优选地,每个所述吊环均具有扭转自由度、框架自由度和自旋自由度。
26、第二方面,本发明实施例还提供了一种空间七自由度机械臂的悬吊卸载方法,包括:按配重后各个部分质心位置在关节转动中不变原则,在试验前对所述空间机械臂进行划分,得到四个所述工作部分;
27、利用仿真计算机对每个所述工作部分进行配平处理,依次得到一个所述配重的质量;
28、利用仿真计算机对每个所述工作部分的质量静矩进行计算,依次得到每一个所述工作部分的质心的位置;
29、利用仿真计算机对每个所述工作部分的质量进行计算,依次得到每一个所述工作部分的卸载力。
30、优选地,在利用所述仿真计算机计算每个所述工作部分的卸载力之后,还包括:
31、基于所述工作部分的质心的等效位置和所述卸载力,对所述空间机械臂进行空间操控试验。
32、优选地,所述基于所述质心和所述卸载力,对所述空间机械臂进行空间操控试验,包括:
33、基于所述工作部分的质心的等效位置,将所述空间机械臂挂载至卸载系统上;
34、基于所述卸载力对所述空间机械臂进行重力卸载处理;其中,所述重力卸载处理是在所述卸载系统中完成的。
35、对经过所述重力卸载处理后的所述空间机械臂组成操控航天器模拟器闭环试验系统,进行空间操控试验。
36、本发明实施例提供了一种空间七自由度机械臂的悬吊卸载系统及方法,该系统通过对七自由度机械臂的连杆进行局部配重,并对臂杆进行划分,得到四个质量不变的等效部分,每个部分的转动关节不影响该部分的质量和质心位置,然后计算每个等效部分的质心以及质量,得到每一个等效部分的卸载吊点的位置以及标称卸载力。通过将空间机械臂划分成不同部分,并对每个部分进行配重,得到四个质量不变的等效部分,可以有效提高空间机械臂在三维空间内的重力卸载精度。
- 还没有人留言评论。精彩留言会获得点赞!