一种基于自动化高空作业机器人的机械臂的制作方法
本发明涉及机械手,具体涉及一种基于自动化高空作业机器人的机械臂。
背景技术:
1、高空作业机器人是一种能够通过多个传动机构操作高空作业模块在高空指定区域进行作业的机器人,具有高安全性、高稳定性和高灵活性的特点,能够避免人工直接抵达进行高空作业。
2、现有的自动化高空作业机器人通常是将作业模块安装在机械臂的自由端,通过机械臂将作业模块支撑到预设的区域进行作业。然而,所搭载的作业模块在作业时,经常需要机械臂在同一姿态下保持一定时间,在此过程中,机械臂本身的自重、搭载的作业模块的重量以及作业模块作业过程产生的后坐力等,会作用到机械臂的各个关节,使得关节处产生转动或者伸缩的趋势,导致关节的动力来源承受较大的载荷(例如转动关节的驱动电机的输出轴会受到驱使该输出轴进一步转动或反转的力矩、液压缸会受到驱使液压缸进一步伸出或回缩的压力导致供油管路压力上升等),造成设备零部件寿命缩短、机械臂运行异常等。
3、为了确保机械臂可靠保持预设姿态,提升机械臂对搭载的作业模块产生的后坐力的承受能力,减轻机械臂各关节动力来源承受的载荷,保障机械臂各零部件的寿命,确保机械臂持久正常运行,亟需提出一种全新的基于自动化高空作业机器人的机械臂。
技术实现思路
1、本发明目的在于提供一种基于自动化高空作业机器人的机械臂,能够至少部分克服上述技术问题,实现机械臂各关节可靠自锁,保障机械臂各零部件的寿命,确保机械臂持久正常运行。
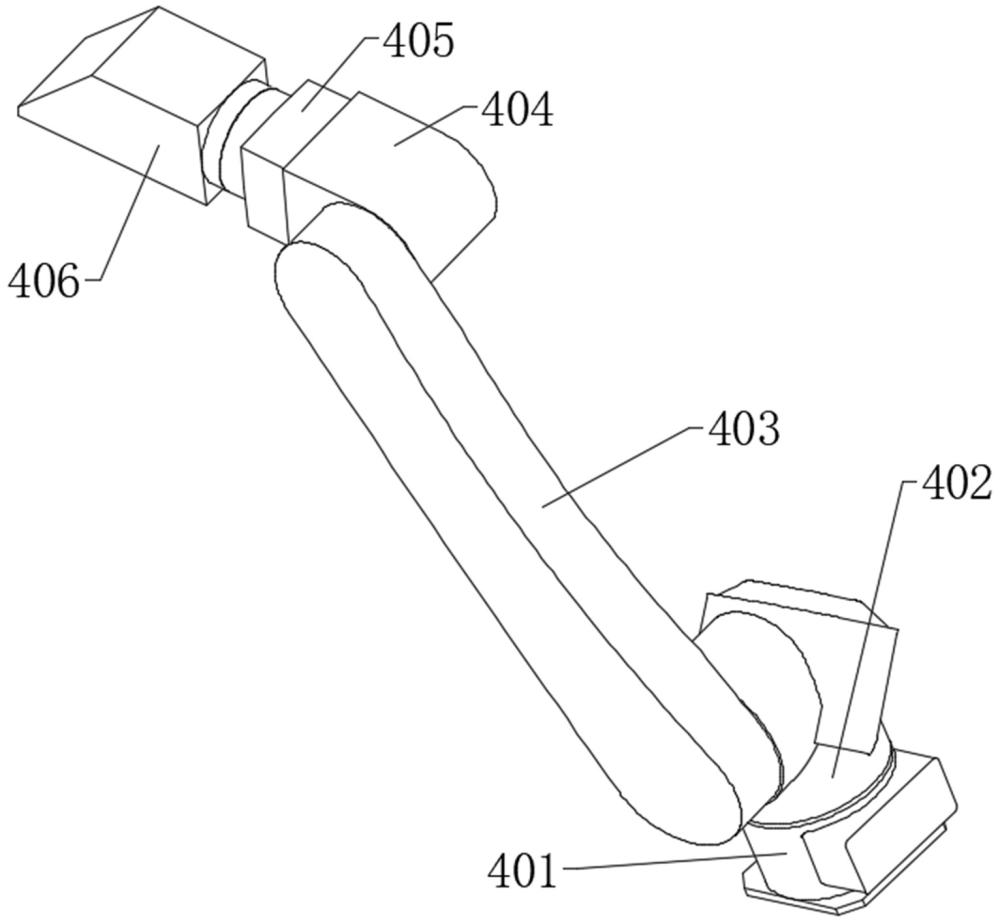
2、本发明提供了一种基于自动化高空作业机器人的机械臂,该自动化高空作业机器人包括机架,在机架上设置有能够进行高度和角度调节的伸缩臂,所述机械臂安装在所述伸缩臂的自由端;所述机械臂包括至少一个转动关节和至少一个移动关节;在所述转动关节处设置有第一锁止机构,所述第一锁止机构能够在所述转动关节开始转动之前解锁所述转动关节,并在所述转动关节结束转动之后锁定所述转动关节;在所述移动关节处设置有第二锁止机构;所述第二锁止机构能够在所述移动关节开始伸缩之前解锁所述移动关节,并在所述移动关节结束伸缩之后锁定所述转动关节。
3、进一步地,所述转动关节包括第一转动件和第二转动件,述第一转动件和所述第二转动件能够绕一预设转轴相对旋转;所述第一锁止机构包括:第一锁销,所述第一锁销为至少一个且设置在所述第二转动件内;第一伸缩单元,所述第一伸缩单元与所述第一锁销一一对应地设置在所述第二转动件内;第一锁合部,所述第一锁合部为若干第一凹槽,且各所述第一凹槽绕所述预设转轴圆周均布在所述第一转动件贴接至所述第二转动件的面上;在所述转动关节结束转动之后,所述第一伸缩单元驱动所述第一锁销向着靠近所述第一转动件的方向运动,并插入至一所述第一凹槽;且在所述转动关节开始转动之前,所述第一伸缩单元驱动所述第一锁销向着远离所述第一转动件的方向运动,并从所述第一凹槽中抽离。
4、进一步地,所述第一锁合部为第一摩擦部,且所述第一摩擦部绕所述预设转轴环向连续分布在所述第一转动件贴接至所述第二转动件的面上;在所述转动关节结束转动之后,所述第一伸缩单元驱动所述第一锁销向着靠近所述第一转动件的方向运动,并抵接至所述第一摩擦部;且在所述转动关节开始转动之前,所述第一伸缩单元驱动所述第一锁销向着远离所述第一转动件的方向运动,并与所述第一摩擦部脱离接触。
5、进一步地,在所述第一转动件内固定安装有电机,所述电机的输出轴延伸至所述第二转动件内;所述第一伸缩单元包括:凸轮部,所述凸轮部设置在所述输出轴上且位于所述第二转动件内;挡板,所述挡板设置在所述第二转动件内,在所述输出轴转动的过程中,在所述输出轴转动的过程中,所述挡板能够止挡所述凸轮部;顶销,所述顶销插设于所述挡板上并与所述挡板滑动连接,所述第一锁销位于所述挡板远离所述输出轴的一侧,所述顶销的滑动方向重合于所述第一锁销与所述输出轴的连线;所述顶销靠近所述输出轴的一端抵接于所述凸轮部的工作面,在所述顶销远离所述输出轴的一端上设有斜面,所述斜面靠近所述输出轴的一侧高于所述斜面远离所述输出轴的一侧;在所述第一锁销上设有顶推部,所述顶推部抵接于所述斜面上;复位簧,所述复位簧设置在所述第一锁销上,所述复位簧使得所述第一锁销承受朝向所述第一转动件的复位力。
6、进一步地,所述移动关节包括第一移动件和第二移动件,所述第一移动件和第二移动件能够沿一预设方向相对移动;所述第二锁止机构包括:第二锁销,所述第二锁销为至少一个且设置在所述第二移动件内;第二伸缩单元,所述第二伸缩单元与所述第二锁销一一对应地设置在所述第二移动件内;第二锁合部,所述第二锁合部为若干第二凹槽,且各所述第二凹槽沿所述预设方向线性阵列在所述第一移动件贴接至所述第二移动件的面上;在所述移动关节结束移动之后,所述第二伸缩单元驱动所述第二锁销向着靠近所述第一移动件的方向运动,并插入至一所述第二凹槽;且在所述移动关节开始移动之前,所述第二伸缩单元驱动所述第二锁销向着远离所述第一移动件的方向运动,并从所述第二凹槽中抽离。
7、进一步地,所述第二锁合部为第二摩擦部,且所述第二摩擦部沿所述预设方向线性连续分布在所述第一移动件贴接至所述第二移动件的面上;在所述移动关节结束移动之后,所述第二伸缩单元驱动所述第二锁销向着靠近所述第一移动件的方向运动,并抵接至所述第二摩擦部;且在所述移动关节开始移动之前,所述第二伸缩单元驱动所述第二锁销向着远离所述第一移动件的方向运动,并与所述第二摩擦部脱离接触。
8、进一步地,所述自动化高空作业机器人还包括液压泵,所述第一移动件为双作用液压缸,所述第二移动件连接至所述双作用液压缸的活动端;所述第二伸缩单元为单作用液压缸,在所述单作用液压缸的无杆侧设置有压簧;所述液压泵连接至二位四通阀ⅰ的p端,所述二位四通阀ⅰ的a端通过第一油管连接至所述单作用液压缸的有杆侧,所述第一油管通过第二油管连接至二位四通阀ⅱ的p端;在所述第二油管上还设置有第一溢流阀,在所述第一油管内的油压超过预设阈值的情况下,所述第一溢流阀溢流,使得所述第二油管成为通路;所述二位四通阀ⅱ的a端和b端分别连接至所述双作用液压缸的有杆侧和无杆侧;所述二位四通阀ⅱ的o端连接至所述二位四通阀ⅰ的b端;所述二位四通阀ⅰ的o端连接至油箱。
9、进一步地,所述自动化高空作业机器人的作业模块为喷砂枪,所述喷砂枪安装在所述机械臂的末端,所述自动化高空作业机器人还包括空气压缩机;所述第一移动件为双作用气缸,所述第二移动件连接至所述双作用气缸的活动端;所述第二伸缩单元为单作用气缸,在所述单作用气缸的无杆侧设置有压簧;所述空气压缩机连接至二位四通阀ⅲ的p端,所述二位四通阀ⅲ的a端通过第一气管连接至所述单作用气缸的有杆侧,所述二位四通阀ⅲ的b端连接至所述喷砂枪;所述第一气管通过第二气管连接至二位四通阀ⅳ的p端;在所述第二气管上还设置有第二溢流阀,在所述第一气管内的气压超过预设阈值的情况下,所述第二溢流阀溢流,使得所述第二气管成为通路;所述二位四通阀ⅳ的a端和b端分别连接至所述双作用气缸的有杆侧和无杆侧;所述二位四通阀ⅳ的o端连接至大气。
10、本发明与现有技术相比,具有如下的优点和有益效果:
11、1、本公开实施例提供的一种基于自动化高空作业机器人的机械臂,通过设置的第一伸缩单元、第一锁销、第一凹槽、第二伸缩单元、第二锁销、第二凹槽,能够在各关节停止运动的情况下,执行锁定,并由对应的第一锁止机构或第二锁止机构承受作用在该关节上的机械臂本身的自重、搭载的作业模块的重量以及作业模块作业过程产生的后坐力等负载;
12、2、本公开实施例提供的一种基于自动化高空作业机器人的机械臂,各转动关节的锁定不存在“步进”现象,可以实现无极锁定,能够使得各转动关节在任意位置锁定;通过使用柔性的第一摩擦部和第一锁销的刚性头部相抵接,能够接触得更加紧密且使得接触面积更大,锁定效果更佳;第一锁销的头部的尺寸小于所述环槽的环宽,能够使得第一锁销的头部在抵接至第一摩擦部后,第一摩擦部靠近于第一锁销的头部处的柔性材料向上凸起并抵接至所述第而转动件贴接至所述第一转动件的面上,能够进一步地确保锁止效果;
13、3、本公开实施例提供的一种基于自动化高空作业机器人的机械臂,在任一所述转动关节停止转动的情况下,所述电机停止动力输出,所述凸轮部不再顶推所述顶销,所述第一锁销在所述复位簧的作用下伸出,实现该转动关节的锁定,在第一锁销伸出的过程中,顶推部抵接于所述斜面,使得顶销回退,顶销回退将凸轮部复位;在所述转动关节开始转动时,所述凸轮部转动,此时所述凸轮部顶推所述顶销使得所述顶销伸出,所述顶销在伸出的过程中,所述斜面抵接于所述顶推部,使得第一锁销回缩,实现该关节的解锁,所述输出轴继续转动,使得所述凸轮部抵接于所述挡板的内壁,而后所述第二转动件在所述凸轮部的顶推下开始转动;基于此,所述第一伸缩单元的伸缩动作无需单独进行控制,仅需控制所述电机的启停,控制所述电机启动,则所述输出轴开始转动并使得所述第一锁销回缩,解锁该转动关节,且在解锁后,所述输出轴继续转动使得所述凸轮部抵接于所述挡板,将动力传输至所述第二转动件;控制所述电机停转,所述第一锁销则在复位簧的作用下伸出,锁定该转动关节;
14、4、本公开实施例提供的一种基于自动化高空作业机器人的机械臂,无需单独操控第二伸缩单元的动作,在移动关节需要执行动作时,仅需通过控制二位四通阀ⅰ的位置,将液压油泵入第一油管,使得所述单作用液压缸回缩,移动关节解锁,而后,第一油管的油压持续升高,使得第一溢流阀溢流,进而液压油接入到第一移动件使得第一移动件动作,通过二位四通阀ⅱ可以改变移动关节的移动状态(伸长或者缩短);在所述移动关节完成动作后,仅需控制二位四通阀ⅰ换向,使得第一油管与油箱接通,在压簧的作用下,单作用液压缸伸出,进而锁定该移动关节;
15、5、本公开实施例提供的一种基于自动化高空作业机器人的机械臂,移动关节和第二伸缩单元均通过该自动化高空作业机器人作业所需的空气压缩机提供动力,无需单独设置液压泵站,节省了该自动化高空作业机器人的成本,且避免了油液渗漏、油液维护等一系列的麻烦。此外,利用气体介质推动作为第二伸缩单元的单作用气缸,在需要锁止该移动关节时,气体介质能够更快的泄压,使该移动关节的锁止更加及时,有利于确保移动关节的位姿准确。
- 还没有人留言评论。精彩留言会获得点赞!