关节及机器人的制作方法
本发明涉及机器人领域,具体而言,涉及一种关节及机器人。
背景技术:
1、随着机器人技术的发展以及适用领域的扩散,机器人在生产、服务等领域已逐步成为不可替代的工具。关节型机器人,因其动作灵活、结构紧凑等优势被广泛应用。相关技术中的机器人通常包括机械肩关节,用以模拟人体的肩部,支撑机械臂执行举升、旋转等动作。
2、肩关节通常需要两个自由度的摆动以及一个方向的自转,这样就会需要多个驱动件进行不同的驱动,为了减少各部件之间相互运动的干涉,肩关节一般采用串联的方式进行连接。但是串联会导致驱动件的惯量增加,这就需要提高驱动件的功率,大功率的驱动件就会导致占用空间增加以及成本的提高。
技术实现思路
1、本发明的主要目的在于提供一种关节,以解决现有技术肩关节中驱动件惯量大的问题。
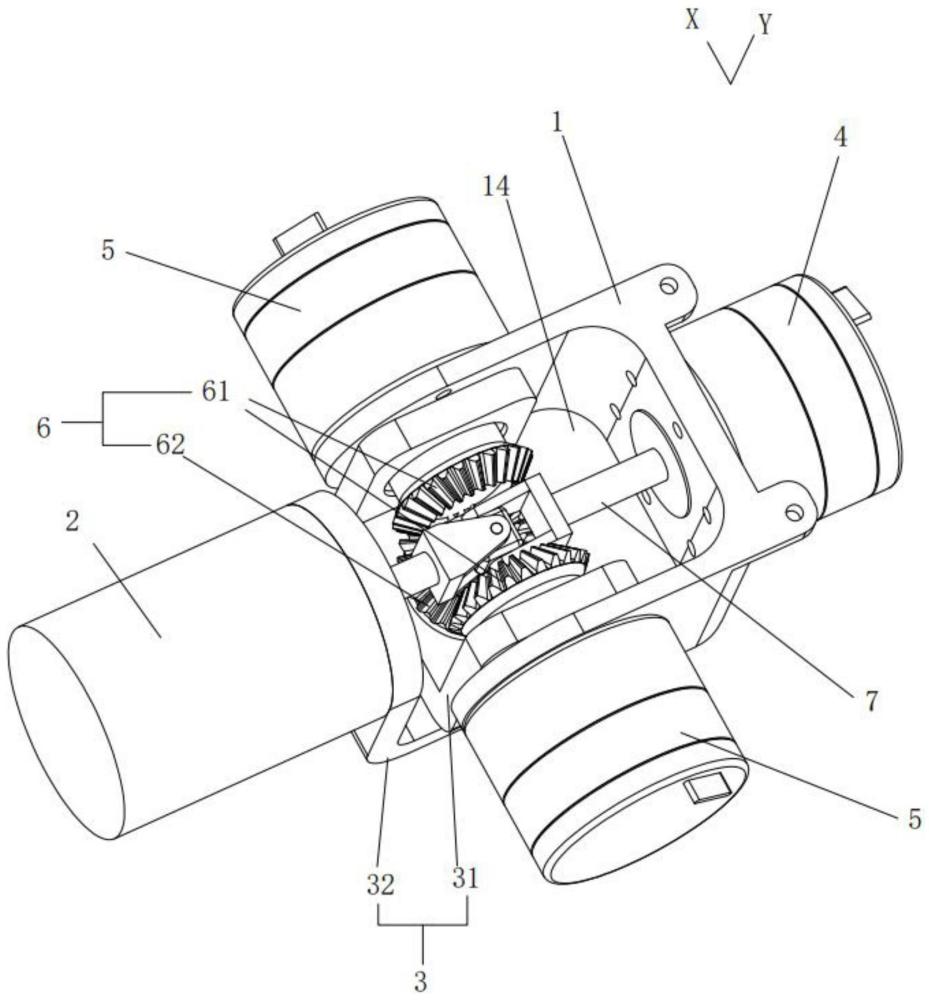
2、为了实现上述目的,根据本发明的一个方面,提供了一种关节,包括:支架,支架具有安装腔;输出结构;摆动组件,摆动组件的至少一部分活动设置在安装腔的内部,输出结构安装在摆动组件上;第一驱动组件和第二驱动组件,第一驱动组件和第二驱动组件设置在支架上,第一驱动组件与输出结构驱动连接,第一驱动组件为输出结构绕第三方向自转提供驱动力;第二驱动组件通过摆动组件与输出结构驱动连接,第二驱动组件为输出结构绕第一方向或与第一方向垂直的第二方向摆动提供驱动力。
3、进一步地,第一驱动组件与输出结构沿第三方向共线或成角度设置;和/或第二驱动组件成对设置,成对设置的两个第二驱动组件沿第一方向共线。
4、进一步地,支架包括顺次连接的第一臂段、第二臂段和第三臂段,沿第三方向第一臂段和第三臂段位于第二臂段的同一侧,第一臂段、第二臂段和第三臂段围成安装腔,第一驱动组件设置在第二臂段上,第二驱动组件设置在第一臂段和/或第三臂段上,输出结构设置在安装腔的外部。
5、进一步地,摆动组件包括第一摆动部和第二摆动部,输出结构绕第三方向可转动地设置在第二摆动部上,第二驱动组件驱动第一摆动部、第二摆动部和输出结构绕第一方向同步转动;或者第二驱动组件驱动第二摆动部绕第二方向转动,第二摆动部带动输出结构绕第二方向同步转动。
6、进一步地,第一摆动部的至少一部分活动设置在安装腔的内部;和/或第二摆动部位于安装腔的外部。
7、进一步地,关节还包括传动组件,第二驱动组件通过传动组件与摆动组件驱动连接,传动组件具有锁止状态和传动状态,当传动组件处于锁止状态时,第二驱动组件通过传动组件驱动第一摆动部和第二摆动部绕第一方向摆动;当传动组件处于传动状态时,第二驱动组件通过传动组件驱动第二摆动部绕第二方向摆动。
8、进一步地,第二驱动组件成对设置,传动组件包括:成对设置的两个第一传动件;第二传动件,第二传动件的第一端沿第二方向可转动地设置在第一摆动部上,第二传动件的第二端与第二摆动部连接,成对设置的两个第二驱动组件分别通过第一传动件与第二传动件驱动连接;当传动组件处于传动状态时,两个第一传动件均与第二传动件转动连接,第二传动件带动输出结构绕第二方向转动;当传动组件处于锁止状态时,两个第一传动件分别与第二传动件抵接以锁止第二传动件,第一传动件和第二传动件同步绕第一方向转动。
9、进一步地,第一摆动部包括:底板段,底板段上具有沿第二方向延伸的安装孔,第二传动件的至少一部分可转动地设置在安装孔的内部;侧板段,沿第一方向底板段的两端分别设置有侧板段,底板段和侧板段围成安装区域,侧板段上具有沿第一方向延伸的过孔,第一传动件的至少一部分可转动地设置在过孔的内部,裸露在安装区域的内部的第一传动件和第二传动件驱动连接。
10、进一步地,第一传动件包括第一套管段和设置在第一套管段背离第一驱动组件一端的第一斜齿,第一斜齿裸露在安装区域的内部;第二传动件包括第二套管段和设置在第二套管段背离第二驱动组件一端的第二斜齿,第二斜齿裸露在安装区域的内部,第一斜齿和第二斜齿啮合。
11、进一步地,第二摆动部包括折弯成型的第一板段和第二板段,第一板段与第二传动件连接,沿第三方向第二板段设置在输出结构和第一驱动组件之间。
12、进一步地,第二板段上具有沿第三方向延伸的第三过孔,输出结构的至少一部分贯穿第三过孔与第一驱动组件连接。
13、进一步地,关节还包括万向节,第一驱动组件通过万向节与输出结构驱动连接。
14、进一步地,万向节设置在安装腔的内部。沿第一方向万向节设置在传动组件的成对设置的两个第一传动件之间的区域;和/或沿第二方向万向节设置在传动组件的第二传动件的上方。
15、根据本发明的另一方面,提供了一种机器人,包括上述关节。
16、应用本发明的技术方案,实现了如下技术效果:
17、1、将驱动组件进行独立安装,使得各驱动组件相互独立工作,避免了驱动组件之间的串联,从而降低了驱动组件的惯量。
18、2、通过两个第二驱动组件不同方向的转动,便于带动输出结构第一方向和第二方向的转动。
19、3、将万向节和传动结构的设置的位置相分离,能够避免各部件之间运动的干涉,从而增加各部件工作的稳定性。
20、4、将不同的驱动件都安装在一个支架上,能够增加结构整体的紧凑性,使得关节能够小型化,减少空间的占用。
21、5、第一驱动件,带动输出结构自转;第二驱动件带动输出结构两个方向的转动,通过第一驱动件和第二驱动件之间的配合,实现输出结构三个方向的转动,能够真实的模拟人的关节。
技术特征:
1.一种关节,其特征在于,包括:
2.根据权利要求1所述的关节,其特征在于,
3.根据权利要求1所述的关节,其特征在于,所述支架(1)包括顺次连接的第一臂段(11)、第二臂段(12)和第三臂段(13),沿第三方向所述第一臂段(11)和所述第三臂段(13)位于所述第二臂段(12)的同一侧,所述第一臂段(11)、所述第二臂段(12)和所述第三臂段(13)围成所述安装腔(14),所述第一驱动组件(4)设置在所述第二臂段(12)上,所述第二驱动组件(5)设置在所述第一臂段(11)和/或所述第三臂段(13)上,所述输出结构(2)设置在所述安装腔(14)的外部。
4.根据权利要求1所述的关节,其特征在于,所述摆动组件(3)包括第一摆动部(31)和第二摆动部(32),所述输出结构(2)绕第三方向可转动地设置在所述第二摆动部(32)上,
5.根据权利要求4所述的关节,其特征在于,
6.根据权利要求4所述的关节,其特征在于,所述关节还包括传动组件(6),所述第二驱动组件(5)通过所述传动组件(6)与所述摆动组件(3)驱动连接,所述传动组件(6)具有锁止状态和传动状态,
7.根据权利要求6所述的关节,其特征在于,所述第二驱动组件(5)成对设置,所述传动组件(6)包括:
8.根据权利要求7所述的关节,其特征在于,所述第一摆动部(31)包括:
9.根据权利要求8所述的关节,其特征在于,
10.根据权利要求7所述的关节,其特征在于,所述第二摆动部(32)包括折弯成型的第一板段(321)和第二板段(322),所述第一板段(321)与所述第二传动件(62)连接,沿所述第三方向所述第二板段(322)设置在所述输出结构(2)和所述第一驱动组件(4)之间。
11.根据权利要求10所述的关节,其特征在于,所述第二板段(322)上具有沿第三方向延伸的第三过孔(3221),所述输出结构(2)的至少一部分贯穿所述第三过孔(3221)与所述第一驱动组件(4)连接。
12.根据权利要求1所述的关节,其特征在于,所述关节还包括万向节(7),所述第一驱动组件(4)通过所述万向节(7)与所述输出结构(2)驱动连接。
13.根据权利要求12所述的关节,其特征在于,所述万向节(7)设置在所述安装腔(14)的内部;
14.一种机器人,其特征在于,包括权利要求1至13中任一项所述的关节。
技术总结
本发明提供了一种关节及机器人,包括:支架,支架具有安装腔;输出结构;摆动组件,摆动组件的至少一部分活动设置在安装腔的内部,输出结构安装在摆动组件上;第一驱动组件和第二驱动组件,第一驱动组件和第二驱动组件设置在支架上,第一驱动组件与输出结构驱动连接,第一驱动组件为输出结构绕第三方向自转提供驱动力;第二驱动组件通过摆动组件与输出结构驱动连接,第二驱动组件为输出结构绕第一方向或与第一方向垂直的第二方向摆动提供驱动力。本发明解决现有技术中肩关节驱动件惯量大的问题。
技术研发人员:李明洋,李顺冲,许雄
受保护的技术使用者:节卡机器人股份有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!