一种机械臂多关节增量编码器异常检测系统的制作方法
本发明涉及机器人,尤其涉及一种机械臂多关节增量编码器异常检测系统。
背景技术:
1、手术机器人拥有多个运动关节,而运动关节又通常使用电机来驱动,电机的运行需要使用编码器来进行速度及位置反馈,行业内使用增量编码器来进行反馈的居多;增量编码器的异常主要分为输出信号缺相或者供电电压波动,上述故障会导致编码器反馈参数异常,造成关节电机飞车,极易造成医疗事故。
2、目前常见的检测方法有:
3、1.增加一个绝对值编码器,使用双编码器校验反馈参数的方法来判断任意一个编码器是否存在异常,此方法的局限在于需要算法处理双编码器反馈参数后,才能判定是否缺相,而后才可以发出指令,使电机停止,对于高实时性的使用场景,风险仍然存在;相互校验实时性不佳,且尺寸大。
4、2.加入采样电路、放大比较电路以及微控制器芯片mcu,对增量编码器输出信号进行采集、放大比较和信号处理后判断编码器运行状态是否正常,该方法加入了mcu处理单元,对电路波形进行处理,电路结构复杂,且增加嵌软开发难度,没有必要;
5、3.使用双向导通的光耦,当编码器无缺相故障时,光耦全部导通,采集节点电压为低电平,以此来判断编码器反馈是否正常,此种方法电路简单,成本低,但是光耦传输效率低,通常小于1mbps,适用于低速场景,对于高速电机应用场景,反馈速度达不到要求,且光耦功耗相对于逻辑器件功耗较大,不适用多增量编码器场景使用。
6、且上述各检测方法只针对增量编码器信号是否缺相做判断,没有对增量编码器的供电稳定性做判断,供电波动同样会导致编码器异常或者处理结果的异常;
7、另外对于手术机器人末端关节,其拥有多个自由度,故需要多个电机及增量编码器,如果将检测增量编码器是否存在异常的结果直接反馈,那么则需要多股线束进行信号传递,对于手术机器人末端关节,其关节狭小,线束布局困难,还需要将多股反馈信号进行处理后再统一传输。
技术实现思路
1、发明目的:针对上述不足,本发明提供一种机械臂多关节增量编码器异常检测系统,采用电路检测的方式,无需增加编码器等额外元器件或嵌软等,使用本方法中的外围电路,电路简单,占电路板面积小,功耗小,检测速率快,更适宜在机器人狭小的关节区域内布置。
2、技术方案:
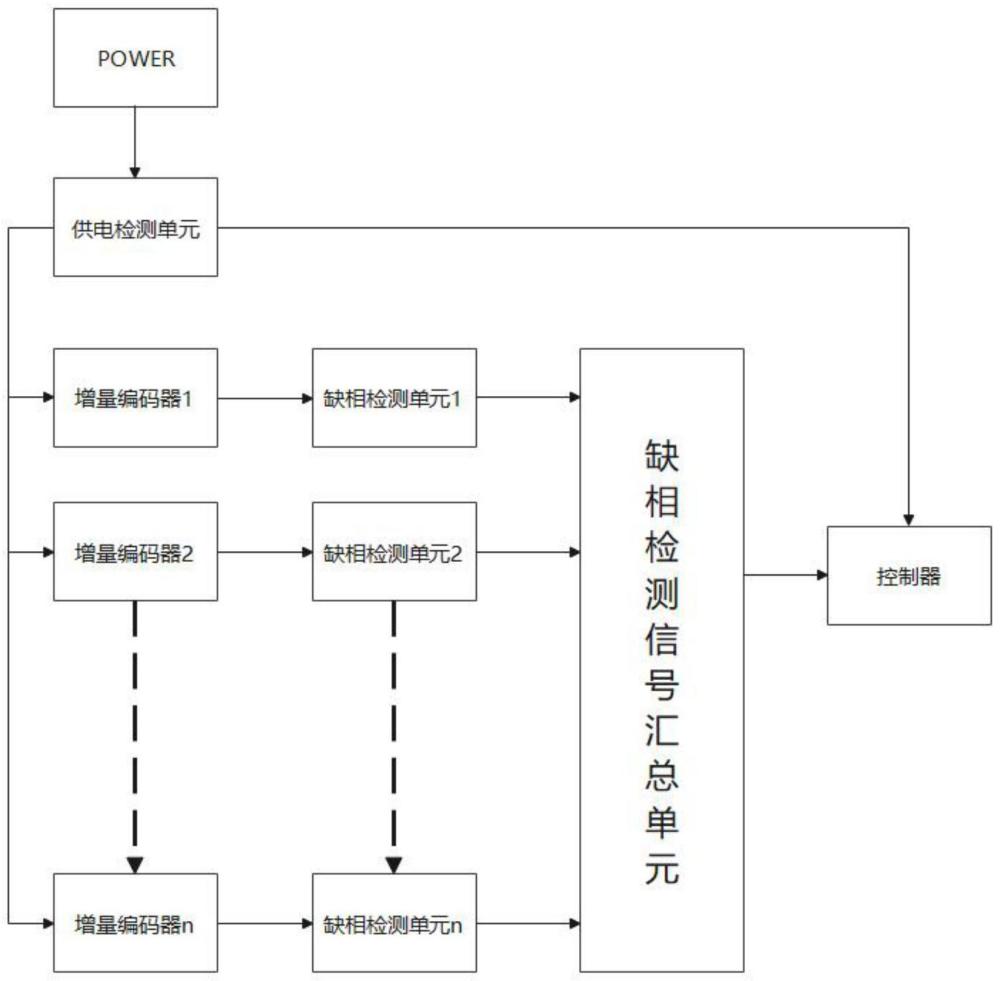
3、一种机械臂多关节增量编码器异常检测系统,包括:
4、多个缺相检测单元,每一缺相检测单元分别与一关节的增量编码器连接,用于检测与其连接的增量编码器是否存在缺相异常,输出缺相检测信号;
5、缺相检测信号汇总单元,与多个缺相检测单元连接,并接收各缺相检测单元输出的缺相检测信号进行汇总处理后发送至控制单元;
6、控制单元,接收经缺相检测信号汇总单元汇总处理后的信号,据此判断是否有增量编码器存在缺相。
7、具体地,还包括供电检测单元,用于检测供电电源对若干个增量编码器的供电电压,并在供电电压跌落至设定阈值以下时输出供电电压异常信号至控制单元。
8、更具体地,所述供电检测单元包括监控复位芯片d18及其外围电路,监控复位芯片d18根据供电电压是否正常输出电平波动信号,复位芯片d18的接地脚接地,输入脚与供电电源连接,并联一接地的电容c47;输出脚连接有并联的低通滤波单元和上拉电阻r66,所述上拉电阻r66与供电电源连接,所述低通滤波单元接地;
9、所述低通滤波单元包括串联的电阻r65和电容c44,电容c44与电阻r65之间设置监控复位芯片d18的输出端,用于输出信号vcc_5v_ok_1,电容c44另一端接地。
10、更进一步地,所述供电检测单元还包括施密特触发器d20,所述施密特触发器d20的接地脚接地,输入脚与供电电源连接,信号输入脚与所述监控复位芯片d18的输出端连接,信号输出脚连接有低通滤波单元;
11、所述低通滤波单元包括串联的电阻r69和电容c49,电容c49与电阻r69之间设置于施密特触发器d20的输出端,用于输出信号vcc_5v_ok,电容c49另一端接地;在电容c49与施密特触发器d20的输入脚之间还设有电容c51作为供电电压vcc_5v的滤波电容。
12、具体地,所述缺相检测单元中包含两路完全一致的检测电路,用于分别检测同一电机的增量编码器的a相和b相的差分信号是否缺相,并输出缺相检测信号;
13、所述检测电路包括异或门逻辑芯片d9及其外围电路,当两检测电路的逻辑芯片d9同时输出高电平时,则对应编码器运行正常,否则输出缺相检测信号。
14、更具体地,所述异或门逻辑芯片d9的信号输入脚1和信号输入脚2分别与增量编码器的某一相差分信号输出端连接;其中,在该相差分信号输出端之间并联有电阻r29和c7,同时该相差分信号输出端与异或门逻辑芯片d9对应的的信号输入脚之间还串联有电阻,同时并联有一电容,组成低通滤波单元,该电容与异或门逻辑芯片d9的接地脚连接;
15、异或门逻辑芯片d9的输出脚连接低通滤波单元,其包括串联的电阻r59和电容c38,电容c38与电阻r59之间设置异或门逻辑芯片d9的输出端,电容c38另一端接地;异或门逻辑芯片d9的信号输出脚与输入脚之间还串联有电阻r55,电阻r55连接供电电源。
16、更进一步地,所述电容c38的电容值根据电机转速进行设置,设置公式为c=(n*r)/(k*r),其中,c为电容c38的电容值,n为增量编码器四倍频后的分辨率,r为电机的额定转速,r为r59的电阻值,k为经验值。
17、具体地,所述缺相检测信号汇总单元包括多路与门逻辑芯片d17及其外围电路,多路与门逻辑芯片d17包括接地脚、信号输入端口及信号输出端口;其中,接地脚接地,信号输入端口包括对应编码器数量的a相信号输入脚和b相信号输入脚及用于输入第一信号的第一信号输入脚,其中,第一信号通过多路与门逻辑芯片d17对对应编码器的a相信号和b相信号分别进行与运算得到;信号输出端口包括用于输入若干前述第一信号的第一信号输出脚及用于输出第二信号的第二信号输出脚,其中,第二信号通过多路与门逻辑芯片d17对各第一信号进行与运算得到,也即为缺相检测信号汇总单元的输出信号。
18、更具体地,在所述第二信号输出脚串联有一由串联电阻r67和电容c45组成的低通滤波单元,所述电阻r67与电容c45之间设置缺相检测信号汇总单元的输出端,用于输出第二信号。
19、更进一步地,设置多个层级的缺相检测信号汇总单元,第一层级的缺相检测信号汇总单元如权利要求8所述;第二层级开始,缺相检测信号汇总单元对应的信号通道设计为包括若干信号输入脚和一个信号输出脚,其中,信号输入脚用于输入前一层级的缺相检测信号汇总单元的输出信号。
20、有益效果:本发明采用电路检测的方式,无需增加编码器等额外元器件或嵌软等,外围电路简单,占电路板面积小,功耗小,检测速率快。且本发明只需要一根信号线即可完成多关节增量编码器的缺相检测,极大减少了线束的使用量。
技术特征:
1.一种机械臂多关节增量编码器异常检测系统,其特征在于,包括:
2.根据权利要求1所述的机械臂多关节增量编码器异常检测系统,其特征在于,还包括供电检测单元,用于检测供电电源对若干个增量编码器的供电电压,并在供电电压跌落至设定阈值以下时输出供电电压异常信号至控制单元。
3.根据权利要求2所述的机械臂多关节增量编码器异常检测系统,其特征在于,所述供电检测单元包括监控复位芯片d18及其外围电路,监控复位芯片d18根据供电电压是否正常输出电平波动信号,复位芯片d18的接地脚接地,输入脚与供电电源连接,并联一接地的电容c47;输出脚连接有并联的低通滤波单元和上拉电阻r66,所述上拉电阻r66与供电电源连接,所述低通滤波单元接地;
4.根据权利要求3所述的机械臂多关节增量编码器异常检测系统,其特征在于,所述供电检测单元还包括施密特触发器d20,所述施密特触发器d20的接地脚接地,输入脚与供电电源连接,信号输入脚与所述监控复位芯片d18的输出端连接,信号输出脚连接有低通滤波单元;
5.根据权利要求1所述的机械臂多关节增量编码器异常检测系统,其特征在于,所述缺相检测单元中包含两路完全一致的检测电路,用于分别检测同一电机的增量编码器的a相和b相的差分信号是否缺相,并输出缺相检测信号;
6.根据权利要求5所述的机械臂多关节增量编码器异常检测系统,其特征在于,所述异或门逻辑芯片d9的信号输入脚1和信号输入脚2分别与增量编码器的某一相差分信号输出端连接;其中,在该相差分信号输出端之间并联有电阻r29和c7,同时该相差分信号输出端与异或门逻辑芯片d9对应的的信号输入脚之间还串联有电阻,同时并联有一电容,组成低通滤波单元,该电容与异或门逻辑芯片d9的接地脚连接;
7.根据权利要求6所述的机械臂多关节增量编码器异常检测系统,其特征在于,所述电容c38的电容值根据电机转速进行设置,设置公式为c=(n*r)/(k*r),其中,c为电容c38的电容值,n为增量编码器四倍频后的分辨率,r为电机的额定转速,r为r59的电阻值,k为经验值。
8.根据权利要求1所述的机械臂多关节增量编码器异常检测系统,其特征在于,所述缺相检测信号汇总单元包括多路与门逻辑芯片d17及其外围电路,多路与门逻辑芯片d17包括接地脚、信号输入端口及信号输出端口;其中,接地脚接地,信号输入端口包括对应编码器数量的a相信号输入脚和b相信号输入脚及用于输入第一信号的第一信号输入脚,其中,第一信号通过多路与门逻辑芯片d17对对应编码器的a相信号和b相信号分别进行与运算得到;信号输出端口包括用于输入若干前述第一信号的第一信号输出脚及用于输出第二信号的第二信号输出脚,其中,第二信号通过多路与门逻辑芯片d17对各第一信号进行与运算得到,也即为缺相检测信号汇总单元的输出信号。
9.根据权利要求8所述的机械臂多关节增量编码器异常检测系统,其特征在于,在所述第二信号输出脚串联有一由串联电阻r67和电容c45组成的低通滤波单元,所述电阻r67与电容c45之间设置缺相检测信号汇总单元的输出端,用于输出第二信号。
10.根据权利要求9所述的机械臂多关节增量编码器异常检测系统,其特征在于,设置多个层级的缺相检测信号汇总单元,第一层级的缺相检测信号汇总单元如权利要求8所述;第二层级开始,缺相检测信号汇总单元对应的信号通道设计为包括若干信号输入脚和一个信号输出脚,其中,信号输入脚用于输入前一层级的缺相检测信号汇总单元的输出信号。
技术总结
本发明公开了机械臂多关节增量编码器异常检测系统,包括:多个缺相检测单元,每一缺相检测单元分别与一关节的增量编码器连接,用于检测与其连接的增量编码器是否存在缺相异常,输出缺相检测信号;缺相检测信号汇总单元,与多个缺相检测单元连接,并接收各缺相检测单元输出的缺相检测信号进行汇总处理后发送至控制单元;控制单元,接收经缺相检测信号汇总单元汇总处理后的信号,据此判断是否有增量编码器存在缺相。本发明采用电路检测的方式,无需增加编码器等额外元器件或嵌软等,外围电路简单,占电路板面积小,功耗小,检测速率快。
技术研发人员:王家鹏
受保护的技术使用者:佗道医疗科技有限公司
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!