一种可穿戴膝关节外骨骼机构
本文涉及可穿戴膝关节外骨骼技术,尤指一种可穿戴膝关节外骨骼机构。
背景技术:
1、外骨骼装置是一类用于辅助使用者进行肢体运动,提供助力以减轻使用者的运动负担的机械装置,其在助老助残、康复医疗和人体增强等领域具有广阔的应用前景。目前,外骨骼的研究主要应用于上肢的康复训练,以及下肢在行走步态下的步态助力。
2、传统的刚性外骨骼通常采用杆件等刚性结构模仿人体骨骼来起到支撑和承重的作用;同时在关节处采用串联弹性驱动器(sea),并联弹性驱动器(pea)和可变刚度驱动器(vsa)等结构来在关节处驱动关节两端躯体的相对转动,并为使用者提供运动所需的辅助力矩。这类结构具有柔顺控制的特性,能够在控制过程中通过结构的弹性变形表现出一定的顺应性,防止使用者受伤;此外,这类驱动器所产生的是直接驱动关节的关节力矩,在关节转动范围内各处具有相同的力矩输出能力。但这类驱动器通常难以保证其转轴与人体关节转轴完全对齐,同时,有研究表明膝关节在运动过程中存在伴随转动的滑动,为非定轴转动。因此,这类外骨骼装置通常存在结构转轴与人体关节转轴不对齐而在关节处产生寄生力,进而影响使用者的舒适性,甚至导致使用者受伤的问题。
3、考虑到绳索作为一种柔性结构,可以发生弯曲变形,具有轻便且成本低廉的优点,近年来,绳索驱动已经被广泛地应用于各类外骨骼装置中,现有的装置大体可分为两类:一类是驱动电机直接布置在膝关节转轴处的,这类装置需要将驱动电机和减速箱布置在膝关节处,其结构较重,使用者活动下肢时不灵活;另一类是采用绳索驱动的装置,但其由于通常没有增加用于力臂放大的结构,因此提供的辅助力矩通常较小,难以满足下蹲到起立动作的力矩要求。
技术实现思路
1、本技术提供了一种可穿戴膝关节外骨骼机构,能够提供人体膝关节的辅助力矩,从而辅助人体完成深蹲起立动作。
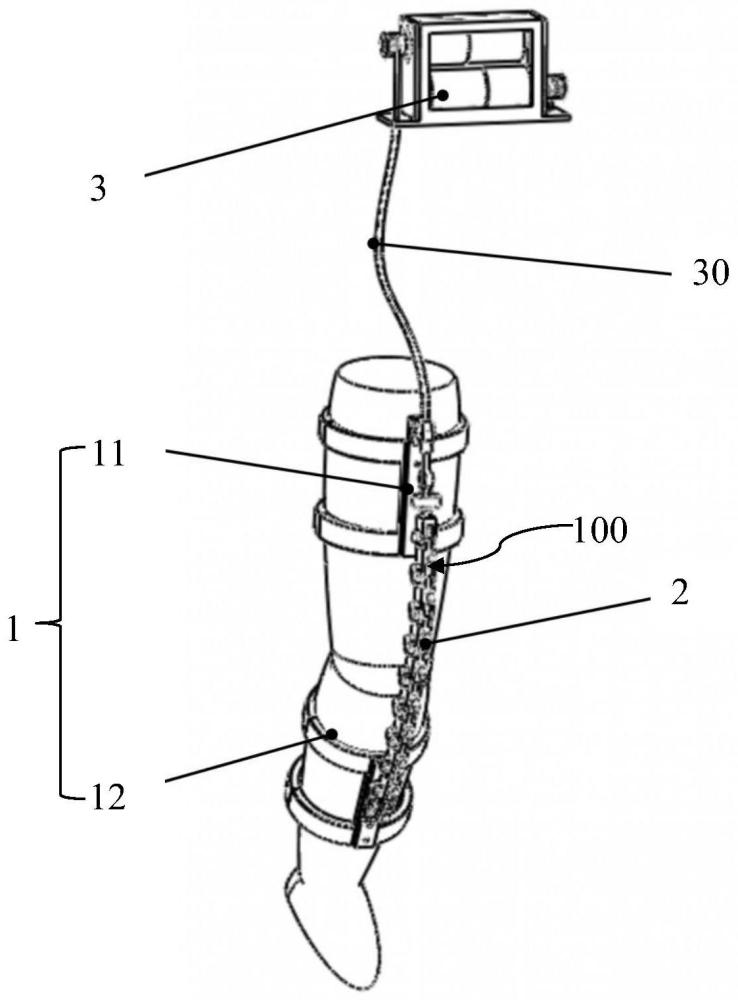
2、本技术提供了一种可穿戴膝关节外骨骼机构,包括:
3、腿部穿戴模块,包括大腿穿戴模块和小腿穿戴模块;
4、连续体结构,包括多个依次串联的链节单元,相邻两个所述链节单元均可在设定角度范围内相对转动,且所述连续体结构的第一端与所述大腿穿戴模块连接,第二端与所述小腿穿戴模块连接,使所述连续体结构能够在驱动装置的作用力下为膝关节在蹲下起立过程中提供辅助力矩,以辅助使用者完成蹲下起立动作。
5、在一个示例性实施例中,所述链节单元的转动轴线与所述可穿戴膝关节外骨骼机构在受力状态的展开平面垂直。
6、在一个示例性实施例中,所述连续体结构的第一端设置成与所述驱动装置相连,所述连续体结构设置成能够在柔性状态与刚性状态之间切换;
7、基于所述腿部穿戴模块处于直立状态,所述连续体结构处于柔性状态,任意相连的两个所述链节单元可在所述设定角度范围内转动;
8、基于所述腿部穿戴模块处于下蹲状态,所述连续体结构在所述驱动装置的拉力作用下达到角度范围的极限而处于刚性状态,使任意相邻的两个所述链节单元均保持相对静止。
9、在一个示例性实施例中,所述链节单元的沿所述连续体结构的伸长方向的相对两端均设有活动连接部,相邻所述链节单元的活动连接部转动连接;
10、任意相邻两个所述链节单元还设有相互配合的限位部,以将相邻两个所述链节单元的转动角度限制在所述设定角度范围内。
11、在一个示例性实施例中,相邻所述链节单元的限位部设置成采用柔性限位件连接以限制相邻所述链节单元的相对转动角度范围。
12、在一个示例性实施例中,所述限位部包括设于所述链节单元的背离所述腿部穿戴模块的一端的拉环或拉杆,所述柔性限位件为绳索。
13、在一个示例性实施例中,所述链节单元的活动连接部设有安装孔,所述安装孔内设有轴套并且在所述安装孔的孔口外侧设有垫片,相邻所述链节单元采用穿过所述安装孔的转动轴连接,所述轴套和垫片分别止挡所述转动轴与所述链节单元接触。
14、在一个示例性实施例中,所述连续体结构的第一端设有系结单元,所述系结单元的一端能够与所述驱动装置的拉绳连接,另一端与相邻的所述链节单元转动连接;所述系结单元的转动轴线与相邻所述链节单元的转动轴线平行。
15、在一个示例性实施例中,所述大腿穿戴模块包括一个或多个间隔设置的第一固定环、设于所述第一固定环的导向座、以及安装于所述导向座并可相对所述导向座转动的导向部,所述导向部供所述驱动装置的拉绳穿过与所述第一端连接。
16、在一个示例性实施例中,所述小腿穿戴模块包括一个或多个间隔设置的第二固定环、以及设于所述第二固定环的固定座,所述连续体结构的第二端与所述固定座固定连接或可转动连接。
17、在一个示例性实施例中,所述第一固定环和所述第二固定环均包括弧形架、以及与所述弧形架配合插接并可调节长度的栓带。
18、在一个示例性实施例中,所述的膝关节外骨骼机构还包括连接所述连续体结构的驱动装置,所述驱动装置包括驱动电机、与所述驱动电机配合安装的滚筒、以及缠绕于所述滚筒的拉绳,所述拉绳与连续体结构的第一端连接,所述驱动电机设置成带动所述滚筒转动收放所述拉绳以向所述连续体结构施加拉力,提供所述连续体结构对膝关节施加的辅助力矩。
19、在一个示例性实施例中,所述的膝关节外骨骼机构还包括拉力传感器,所述拉力传感器的一端与所述连续体结构的第一端连接,另一端与所述拉绳连接,所述拉力传感器检测所述拉绳对所述连续体结构的拉力并反馈至所述驱动装置,所述驱动装置根据所述拉力传感器反馈的拉力信息控制对所述连续体结构的拉力大小。
20、在一个示例性实施例中,所述辅助力矩根据所述连续体结构的等效索结点坐标pc和等效转轴坐标pk以及鲍登线在绳索导向装置上出绳点坐标b0确定;
21、所述等效索结点坐标pc采用如下方式确定:
22、步骤一、取i=1;
23、步骤二、由鲍登线在绳索导向装置上出绳点坐标b0和前一链节单元的末端转轴坐标ai,得到预估绳索方向[δx δy δz]t;
24、步骤三、根据所得到的预估绳索方向[δx δy δz]t和前i-1节链节单元的相对转动角度α1…αi-1,确定第i节链节单元相对前一链节单元的预估偏转角度
25、步骤四、所述得到的预估偏转角度和所设定的转动角度限制值(αi)max,确定第i节链节单元相对前一链节单元的实际偏转角度αi,并确定后一链节单元末端转轴坐标ai,若则且取连续体结构的等效索结点为pc=ai-1,并结束计算;
26、步骤五、否则若则取αi=(αi)max,并确定后一链节单元末端转轴坐标ai;
27、步骤六、取i=i+1;若i>n,取连续体结构的等效索结点为pc=ai-1,并结束计算;否则,重复步骤二至步骤六;
28、其中,i表示链节单元的序号;n表示所有链节单元的数量;ai-1表示第i个链节单元的始端转轴与展开平面的交点ai-1的坐标;ai表示第i个链节单元的终端转轴与展开平面的交点ai坐标;li表示始端转轴与终端转轴间的距离;||ai-1ai||2表示点ai-1和点ai之间的距离;αi表示第i个链节单元与第i-1个链节单元间的夹角。
29、与相关技术相比,本技术实施例的可穿戴膝关节外骨骼机构能够在人体下蹲起立动作时,提供人体膝关节的辅助力矩,从而辅助人体完成深蹲起立动作,并在驱动装置提供作用力一定的情况下,能够尽可能提高该结构在膝关节处所产生的辅助力矩,且柔顺性好,便于人体穿戴、防止对身体行动产生不便或伤害。
30、本技术的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本技术而了解。本技术的其他优点可通过在说明书以及附图中所描述的方案来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!