一种基于极坐标系机械手臂控制的物品保管柜及控制系统的制作方法
本发明属于保管柜,具体涉及一种基于极坐标系机械手臂控制的物品保管柜及控制系统。
背景技术:
1、目前企业以及家庭场景所使用的商用/民用的物品保管柜大都为传统型的抽屉和柜门的储物模式(以下简称:传统式物品保管柜)并配以rfid等物联网技术监控物品的有效取出和归还真实性、准确性判定。其实现方法为抽屉内(或柜门内)存放一个和多个物品,必要时在抽屉内(或柜门内)用隔板进行分割,以达到物品之间的隔离性,防止取错等误操作,在实际操作时,通过上位机的指令控制对应的抽屉(或柜门)开启,以使得具备权限的人员获取物品。归还时通过上位机的指令控制对应的抽屉(或柜门)开启,由操作员将物品放入对应位置即可,如物品需要进行精准归还,并进行真实性判定,则此类储物柜会配以rfid技术,通过发射电磁波信号至提前安置在物品之上的电子标签,并得到信号反馈后,以判断所归还物品的正确性。如丰巢快递柜(柜门型,无需归还物品)和印章管理柜。
2、上述储物柜进行了技术升级,由传统的多个抽屉式(柜门式)变为一个舱门取还物品,内部结构为托盘摆放物品或储物盒放置物品,取还物品时,采用链条式传动物品到舱门处,或圆盘式转动物品至舱门处(以下简称:传动式物品保管柜)。在取物品时,通过上位机发送指令调动传动链条传动或圆盘转动,将所需物品移动至舱门后,由操作人获取。归还时,仍通过上位机发送指令调动传动链条传动或圆盘转动,将需要归还的物品“空位”传动或转动到舱门处后,由操作人归还物品,如物品需要进行精准归还,并进行真实性判定,则此类储物柜会配以rfid技术,通过发射电磁波信号至提前安置在物品之上的电子标签,并得到信号反馈后,以判断所归还物品的正确性。如自动酒柜或自动货柜。
3、综合上述内容,现有中的保管柜还是存在以下问题:
4、1.论抽屉还是柜门,其柜体高度收到操作人所能触及的高度限制,因此无法有效利用高度空间,在容量需求增加时,只能扩展面积来容纳更多的物品,造成纵向空间利用率的极大限制,不利于在有限的面积空间容纳更多的物品;且操作人员需要下蹲、弯腰、垫脚去触达柜子各个高度的,在操作频繁时,会造成极差的客户体验;
5、2.当需要rfid进行盘存物品正确性时,大多在抽屉内(或柜门内)的顶部或底部安置感应器(天线),以此来识别本层抽屉(或柜门)内的物品,加之物品材质中金属对电磁波信号的影响,会造成盘存精准度不足,由此会产生物品正确性判断的失误,进而影响取还风险控制的误报警等一些列错误发生;另外,在每层抽屉(或柜门)内增加感应器(天线)的数量,以此增加准确性,但势必会在每层抽屉(或柜门)内同等增加硬件数量,必然造成总体造价成本的大幅度提升,以及扩大通讯调度的耗时,不利于工作效率的提升;
6、3.归还物品时,上述传动式物品保管柜需要先将“空位”传动或转动至舱门处,再由操作员将指定的物品放入,当归还物品较多时,则需要不仅需要等待“空位”转至舱门的时间,同时仍需要将特定物品从操作员处找到后放入,无形中增加了操作员找寻特定物品的时间。
技术实现思路
1、本发明的目的是提供一种基于极坐标系机械手臂控制的物品保管柜及控制系统,能够充分解决传统式和传动式物品保管柜的高度受限问题、操作体验差、rfid识别瓶颈、空间利用率低、以及归还时等待耗时长、操作复杂等问题。
2、本发明采取的技术方案具体如下:
3、一种基于极坐标系机械手臂控制的物品保管柜,包括柜体,所述柜体内壁装配若干层存放平台,所述存放平台上均设置有若干个托盒,所述托盒呈环形阵列分布,所述托盒之间均设置有挡块;
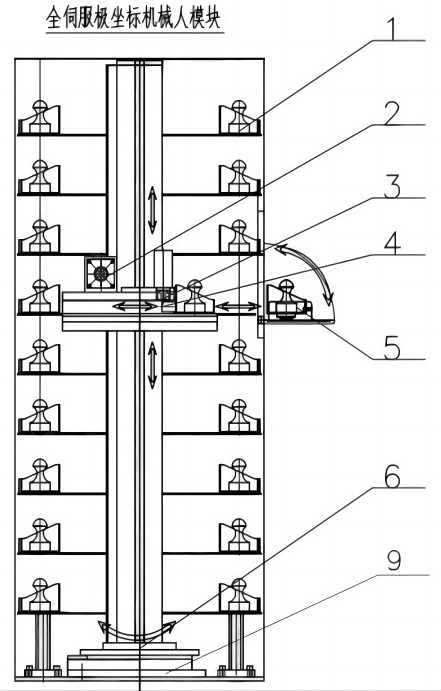
4、所述柜体内腔底部装配有回转支撑固定座,所述回转支撑固定座内设置有回转机构,所述回转机构顶部装配有立柱,所述立柱侧壁滑动连接有安装座,所述安装座上分别设置有垂直升降机构、全伺服极轴移动机构,所述全伺服极轴移动机构上装配有电磁块和光感应模块;所述柜体侧壁装配有舱门,所述舱门一侧设置有旋转门机构。
5、所述垂直升降机构上装配有机械手,所述机械手端面装配有第一电磁铁,所述托盒后侧壁装配有第二电磁铁。
6、所述存放平台底面位于托盒下方装配有磁块,所述托盒底部固定连接有金属片。
7、位于所述舱门上侧的存放平台底面安装有rfid信号鉴别机构,所述rfid信号鉴别机构与托盒对应。
8、所述立柱端面开设有安装孔,所述立柱端面靠近边角处均开设有圆孔,所述立柱侧壁固定连接有限位轨,所述立柱侧壁开设有安装槽。
9、所述柜体内腔上下侧壁分别安装有高度限制警报装置。
10、一种基于极坐标系机械手臂控制的控制系统,所述控制系统包括:
11、上位机:用于操作、监视和管理存放物品数据,并实时同步信号;
12、plc控制器:在控制取物、还物动作时,先将被操控的物品槽位编码传递至plc控制器,用于控制执行部件动作;
13、rfid设备:柜体内部配置rfid主控器和至少2枚感应天线,用于读取物品信息。所述rfid主控器读取物品信息错误时,则错误类型分为:少取、错还、少还和错还;
14、当保管柜系统开机时,系统进入自检程序,并判定自检是否成功;
15、自检动作包括:对通道障碍物检查,当存在异物时,发生提示信息,并判断障碍物是否为托盒,若为托盒,在控制app上填入托盒位置点击回位,校验正确后按指示回槽位,若非托盒,则发出警报信息。
16、自检成功时,则系统进入下一步归零程序;自检失败时,则系统提示失败原因,并给出纠错提示;
17、归零动作包括:执行单元回零检查、旋转检查、上下运行检查、推拉取放托盒检查及舱门开门检查;
18、归零成功时,则系统进入就绪状态;归零错误时,则判定是某步骤自检失败,并发出提示信息。
19、用户在取物或还物时,先进行身份验证,当验证身份信息正确时,打开舱门,将指定的托盒推出,用户可取物或还物;当身份验证失败后,则需重新验证;
20、系统获取到物品存放或取走信息时,发出控制指令,驱动机械臂抓取托盒,并将托盒放置原有位置,机械臂回位,同时系统记录此次动作信息,并提示取物或还物正确。
21、本发明取得的技术效果为:
22、本发明的一种基于极坐标系机械手臂控制的物品保管柜及控制系统突破传统式物品保管柜的高度限制,不再由人手拿物品,由机械手臂代劳,可以拿的更高;同时在面积不变的情况下,可以定制高度,根据高度不同而做出不同的取还动作。
23、本发明的一种基于极坐标系机械手臂控制的物品保管柜及控制系统将rfid识别精度推向100%,原采用1对1的识别模式,让识别的规则性更强,且可以归还物品顺序自由。
24、本发明的一种基于极坐标系机械手臂控制的物品保管柜及控制系统取放物品时,不用垫脚、弯腰、下蹲、推拉抽屉、手动关门开门,且采用一个出口更加便捷,提升工作效率和操作体验,
技术特征:
1.一种基于极坐标系机械手臂控制的物品保管柜,其特征在于:包括柜体,所述柜体内壁装配若干层存放平台(1),所述存放平台(1)上均设置有若干个托盒,所述托盒呈环形阵列分布,所述托盒之间均设置有挡块;所述柜体内腔底部装配有回转支撑固定座(9),所述回转支撑固定座(9)内设置有回转机构(6),所述回转机构(6)顶部装配有立柱(7),所述立柱(7)侧壁滑动连接有安装座(8),所述安装座(8)上分别设置有垂直升降机构(2)、全伺服极轴移动机构(3),所述全伺服极轴移动机构(3)上装配有电磁块(4)和光感应模块;所述柜体侧壁装配有舱门,所述舱门一侧设置有旋转门机构(5)。
2.根据权利要求1所述的一种基于极坐标系机械手臂控制的物品保管柜,其特征在于:所述垂直升降机构(2)上装配有机械手,所述机械手端面装配有第一电磁铁,所述托盒后侧壁装配有第二电磁铁。
3.根据权利要求1所述的一种基于极坐标系机械手臂控制的物品保管柜,其特征在于:所述存放平台(1)底面位于托盒下方装配有磁块,所述托盒底部固定连接有金属片。
4.根据权利要求1所述的一种基于极坐标系机械手臂控制的物品保管柜,其特征在于:位于所述舱门上侧的存放平台(1)底面安装有rfid信号鉴别机构,所述rfid信号鉴别机构与托盒对应。
5.根据权利要求1所述的一种基于极坐标系机械手臂控制的物品保管柜,其特征在于:所述立柱(7)端面开设有安装孔(13),所述立柱(7)端面靠近边角处均开设有圆孔(10),所述立柱(7)侧壁固定连接有限位轨(11),所述立柱(7)侧壁开设有安装槽(12)。
6.根据权利要求1所述的一种基于极坐标系机械手臂控制的物品保管柜,其特征在于:所述柜体内腔上下侧壁分别安装有高度限制警报装置。
7.一种基于极坐标系机械手臂控制的控制系统,其特征在于:用于如权利要求1-5任一项所述的基于极坐标系机械手臂控制的物品保管柜,所述控制系统包括:上位机:用于操作、监视和管理存放物品数据,并实时同步信号;plc控制器:在控制取物、还物动作时,先将被操控的物品槽位编码传递至plc控制器,用于控制执行部件动作;rfid设备:柜体内部配置rfid主控器和至少2枚感应天线,用于读取物品信息。
8.根据权利要求7所述的一种基于极坐标系机械手臂控制的控制系统,其特征在于:所述rfid主控器读取物品信息错误时,则错误类型分为:少取、错还、少还和错还。
9.根据权利要求7所述的一种基于极坐标系机械手臂控制的控制系统,其特征在于:当保管柜系统开机时,系统进入自检程序,并判定自检是否成功;自检动作包括:对通道障碍物检查,当存在异物时,发生提示信息,并判断障碍物是否为托盒,若为托盒,在控制app上填入托盒位置点击回位,校验正确后按指示回槽位,若非托盒,则发出警报信息;自检成功时,则系统进入下一步归零程序;自检失败时,则系统提示失败原因,并给出纠错提示;归零动作包括:执行单元回零检查、旋转检查、上下运行检查、推拉取放托盒检查及舱门开门检查;归零成功时,则系统进入就绪状态;归零错误时,则判定是某步骤自检失败,并发出提示信息;系统获取到物品存放或取走信息时,发出控制指令,驱动机械臂抓取托盒,并将托盒放置原有位置,机械臂回位,同时系统记录此次动作信息,并提示取物或还物正确。
技术总结
本发明属于保管柜技术领域,具体涉及一种基于极坐标系机械手臂控制的物品保管柜及控制系统,包括柜体,所述柜体内壁装配若干层存放平台,所述存放平台上均设置有若干个托盒,所述托盒呈环形阵列分布,所述托盒之间均设置有挡块;所述柜体内腔底部装配有回转支撑固定座,所述回转支撑固定座内设置有回转机构,所述回转机构顶部装配有立柱,所述立柱侧壁滑动连接有安装座,所述安装座上分别设置有垂直升降机构、全伺服极轴移动机构,所述全伺服极轴移动机构上装配有电磁块和光感应模块。本发明能够充分解决传统式和传动式物品保管柜的高度受限问题、操作体验差、RFID识别瓶颈、空间利用率低、以及归还时等待耗时长、操作复杂等问题。
技术研发人员:祁琳,李国正,牛泽浩,戴鹏飞,段会丽,张燕清,李宏洋,祁欣,练小龙,刘人铫
受保护的技术使用者:深圳市顺易通信息技术有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!