一种轻质隔墙板安装机器人远程运行操控系统的制作方法
本发明涉及轻质隔墙板安装领域,尤其涉及一种轻质隔墙板安装机器人远程运行操控系统。
背景技术:
1、轻质隔墙是现有建筑领域内一类很常见的新型节能墙材料,常用的品种有蒸压轻质加气混凝土(nalc)板、聚苯颗粒夹芯板等,广泛应用于办公、商务、居民楼的内部平面分割。
2、轻质隔墙板通常宽度为600mm,高度为2500~3500mm,重量200公斤左右,现有的轻质隔墙板安装设备通常是简易的两轮推车,两名工人将一块隔墙板置于小车上,推动小车至安装位置,然后合力将隔墙板立起来。该安装方法为手工式作业,机械效率较低,工人体力消耗大,安装费用较高。因此,针对上述问题,有必要提出进一步地解决方案。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种轻质隔墙板安装机器人远程运行操控系统,该轻质隔墙板安装机器人远程运行操控系统的结构设计可以有效地解决安装机器人操控过程意外情况难以获知的问题。
2、为了达到上述目的,本发明提供如下技术方案:
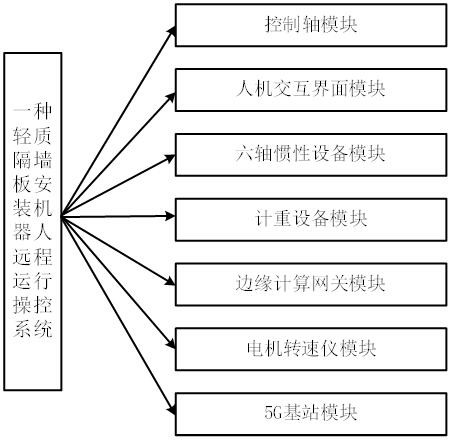
3、一种轻质隔墙板安装机器人远程运行操控系统,包括用于监控设置于安装机器人上用于定位和测量的机械臂握持状态的控制轴模块、用于获取所述机械臂处姿态信息的六轴惯性设备模块,所述控制轴模块与所述六轴惯性设备模块分别与人机交互界面模块电性连接,所述人机交互界面模块用于在所述机械臂的握持状态与预设位置不对应时控制所述六轴惯性设备模块进行姿态测量并将姿态数据进行安全性分析。
4、进一步地,上述轻质隔墙板安装机器人远程运行操控系统中,还包括用于获取所述安装机器人的轻质隔墙板重量的计重设备模块,所述计重设备模块与所述人机交互界面模块电性连接,以将所述轻质隔墙板重量发送至所述人机交互界面模块。
5、进一步地,上述轻质隔墙板安装机器人远程运行操控系统中,还包括设置于所述安装机器人的供能装置内、用于监测电机转速的电机转速仪模块,所述电机转速仪模块与所述人机交互界面模块电性连接。
6、进一步地,上述轻质隔墙板安装机器人远程运行操控系统中,还包括5g基站模块和边缘计算网关模块,所述人机交互界面模块通过所述5g基站模块与所述边缘计算网关模块电性连接,以将所述机械臂的握持状态、所述轻质隔墙板重量、所述电机转速和所述姿态数据发送至所述边缘计算网关模块并进行安全性分析。
7、进一步地,上述轻质隔墙板安装机器人远程运行操控系统中,所述边缘计算网关模块还用于根据电机转速仪模块反馈的电机转速快慢进行能耗分析。
8、进一步地,上述轻质隔墙板安装机器人远程运行操控系统中,所述人机交互界面模块还用于在定位结束时刻起统计所述机械臂运行的效率,还包括与所述人机交互界面模块电性连接、用于优化统计效率的优化后端代码。
9、进一步地,上述轻质隔墙板安装机器人远程运行操控系统中,所述人机交互界面模块还用于记录各次所述机械臂运行对应的时刻与所述安装机器人在所述轻质隔墙板重量中的位置。
10、进一步地,上述轻质隔墙板安装机器人远程运行操控系统中,所述机械臂包括交错轴齿轮,所述交错轴齿轮通过齿轮转速传感器接口与齿轮转速传感器连接以监控所述交错轴齿轮的齿轮转速状态。
11、进一步地,上述轻质隔墙板安装机器人远程运行操控系统中,所述机械臂包括设置于所述底座前端的摄像头,与所述摄像头对应设置有红外感应设备。
12、进一步地,上述轻质隔墙板安装机器人远程运行操控系统中,还包括用于监控所述安装机器人运动速度的加速度传感器,所述加速度传感器与所述人机交互界面模块电性连接。
13、本发明提供的轻质隔墙板安装机器人远程运行操控系统包括控制轴模块、六轴惯性设备模块和人机交互界面模块,且控制轴模块和六轴惯性设备模块均与人机交互界面模块电性连接。其中,控制轴模块用于监控安装机器人上用于定位及测量的机械臂的运行及故障状态,并将机械臂的握持状态发送至人机交互界面模块;人机交互界面模块用于判断机械臂的握持状态是否与预设位置对应,若否,则控制六轴惯性设备模块进行姿态测量并将姿态数据进行安全性分析;六轴惯性设备模块设置于机械臂处以获得机械臂的姿态信息。
14、本发明提供的一种轻质隔墙板安装机器人远程运行操控系统,通过控制轴模块实时监测机械臂的运行或者故障状态,并且将实时位置发送至人机交互界面模块,人机交互界面模块根据预置的对应操控过程各流程中机械臂的预设位置,与实时位置比较,当机械臂的实施状态与预设位置不对应时,则表明发生故障情况,控制六轴惯性设备模块进行姿态测量,并将姿态数据进行安全性分析于人机交互界面模块,进而操控工程师可以通过调取人机交互界面模块内的姿态数据对故障情况进行追踪调查。同时六轴惯性设备模块也可以实施拍摄机械臂处的视频信息并进行安全性分析于人机交互界面模块,全方位获知操控过程机械臂状态。通过轻质隔墙板安装机器人远程运行操控系统,提高了安装机器人操控的安全性,节约了人力成本,提高了工作效率。
技术特征:
1.一种轻质隔墙板安装机器人远程运行操控系统,其特征在于,该系统包括用于监控设置于安装机器人上用于定位和测量的机械臂握持状态的控制轴模块、用于获取所述机械臂处姿态信息的六轴惯性设备模块,所述控制轴模块与所述六轴惯性设备模块分别与人机交互界面模块电性连接,所述人机交互界面模块用于在所述机械臂的握持状态与预设位置不对应时控制所述六轴惯性设备模块进行姿态测量并将姿态数据进行安全性分析;
2.根据权利要求1所述的轻质隔墙板安装机器人远程运行操控系统,其特征在于,还包括5g基站模块和边缘计算网关模块,所述人机交互界面模块通过所述5g基站模块与所述边缘计算网关模块电性连接,以将所述机械臂的握持状态、所述轻质隔墙板重量、所述电机转速和所述姿态数据发送至所述边缘计算网关模块并进行安全性分析。
3.根据权利要求2所述的轻质隔墙板安装机器人远程运行操控系统,其特征在于,所述边缘计算网关模块还用于根据电机转速仪模块反馈的电机转速快慢进行能耗分析。
4.根据权利要求1所述的轻质隔墙板安装机器人远程运行操控系统,其特征在于,所述人机交互界面模块还用于在定位结束时刻起统计所述机械臂运行的效率,还包括与所述人机交互界面模块电性连接、用于优化统计效率的优化后端代码。
5.根据权利要求1所述的轻质隔墙板安装机器人远程运行操控系统,其特征在于,所述人机交互界面模块还用于记录各次所述机械臂运行对应的时刻与所述安装机器人在所述轻质隔墙板重量中的位置。
6.根据权利要求1所述的轻质隔墙板安装机器人远程运行操控系统,其特征在于,所述机械臂包括交错轴齿轮,所述交错轴齿轮通过齿轮转速传感器接口与齿轮转速传感器连接以监控所述交错轴齿轮的齿轮转速状态。
7.根据权利要求6所述的轻质隔墙板安装机器人远程运行操控系统,其特征在于,所述机械臂包括设置于底座前端的摄像头,与所述摄像头对应设置有红外感应设备。
8.根据权利要求1所述的轻质隔墙板安装机器人远程运行操控系统,其特征在于,还包括用于监控所述安装机器人运动速度的加速度传感器,所述加速度传感器与所述人机交互界面模块电性连接。
技术总结
本发明公开了一种轻质隔墙板安装机器人远程运行操控系统,包括用于监控设置于安装机器人上用于定位和测量的机械臂握持状态的控制轴模块、用于获取所述机械臂处姿态信息的六轴惯性设备模块,所述控制轴模块与所述六轴惯性设备模块分别与人机交互界面模块电性连接,所述人机交互界面模块用于在所述机械臂的握持状态与预设位置不对应时控制所述六轴惯性设备模块进行姿态测量并将姿态数据进行安全性分析。当机械臂的实施状态与预设位置不对应时,则表明发生故障情况,控制六轴惯性设备模块进行姿态测量,并将姿态数据进行安全性分析于人机交互界面模块,通过轻质隔墙板安装机器人远程运行操控系统,节约了人力成本,提高了工作效率。
技术研发人员:何晓彤,马超,钟志彬,黄尚珩,刘启超,李杰,杨成,杨乾,龙丹冰,胡煜烽
受保护的技术使用者:成都建工第三建筑工程有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!