取料夹具及机器人的制作方法
本发明涉及空调生产,具体而言,涉及一种取料夹具及机器人。
背景技术:
1、目前,大部分厂区的空调外机的连接管的上线方式均为通过工装车输送,并从工装车里取料,因为连接管的盘管和热缩工艺的不稳定以及连接管的厚度和直径等有偏差等原因,连接管在工装车里叠放后会出现倾斜、大小不一、高低不同等问题,从而导致连接管的取料难度高,上料时间长且上料效率低。
技术实现思路
1、本发明的主要目的在于提供一种取料夹具及机器人,以解决现有技术中的空调外机的连接管的取料难度高,上料时间长且上料效率低的问题。
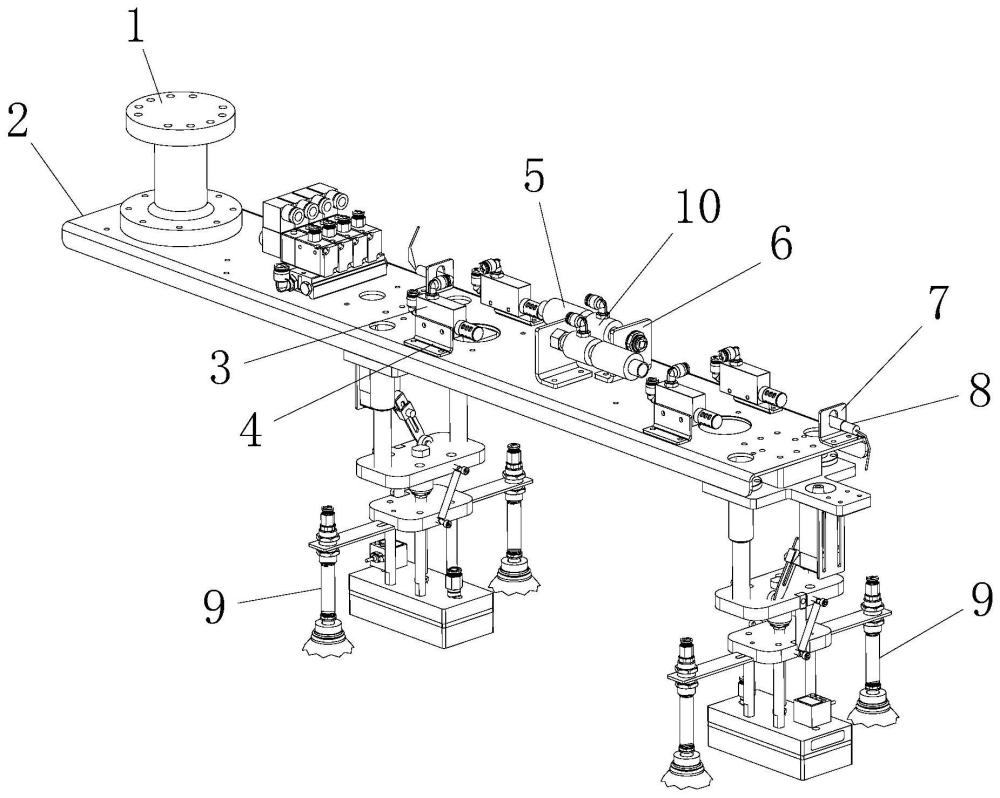
2、为了实现上述目的,根据本发明的一个方面,提供了一种取料夹具,包括:固定板,固定板用于与机器人的机器人本体连接;浮动吸放机构,浮动吸放机构包括:连接块,连接块安装于固定板;固定连接板,固定连接板与连接块连接且沿远离或靠近连接块的方向可移动地设置;吸盘组件,吸盘组件用于吸取或释放工件,吸盘组件包括浮动安装板和间隔设置在浮动安装板上的多个吸盘部件;浮动接头,浮动接头的两端分别与连接块和吸盘组件连接;吸盘驱动组件,吸盘驱动组件包括多个真空产生器,多个真空产生器间隔设置在固定板上且与多个吸盘部件一一对应地连接,以向相应的吸盘组件送气或从相应的吸盘组件中抽气。
3、进一步地,浮动吸放机构包括导向限位组件,导向限位组件包括可相对运动地连接的运动部和导向部,运动部和导向部中的一个与固定连接板连接,运动部和导向部中的另一个与连接块连接,以沿远离或靠近连接块的方向可移动地设置。
4、进一步地,运动部包括长轴,导向部包括导向套件,导向套件安装在连接块上,长轴安装在固定连接板上,且长轴穿设在导向套件上以相对于导向套件可滑动地设置。
5、进一步地,导向限位组件包括弹性缓冲件,弹性缓冲件套设在长轴上且位于导向套件和固定连接板之间。
6、进一步地,浮动吸放机构包括行程开关,行程开关位于连接块和固定连接板之间,行程开关的开关主体安装于连接块且与机器人本体电连接,行程开关的触头用于与固定连接板接触或分离,以当行程开关的触头与固定连接板接触时控制机器人本体停止运动。
7、进一步地,多个吸盘部件包括中间吸盘部件,中间吸盘部件包括海绵吸盘和海绵吸盘连接杆,海绵吸盘位于浮动安装板的远离固定连接板的一侧且通过海绵吸盘连接杆与浮动安装板连接。
8、进一步地,多个吸盘部件包括侧部吸盘部件,侧部吸盘部件包括花瓣吸盘、缓冲杆和侧部连接板,侧部连接板与浮动安装板连接且平行于浮动安装板,缓冲杆平行于海绵吸盘连接杆,花瓣吸盘通过缓冲杆与侧部连接板连接且位于侧部连接板的远离连接块的一侧。
9、进一步地,侧部吸盘部件的数量为多个,多个侧部吸盘部件环绕中间吸盘部件间隔设置且均与浮动安装板连接。
10、进一步地,浮动吸放机构包括压力开关,压力开关与机器人本体电连接,压力开关安装在海绵吸盘上且位于海绵吸盘的靠近连接块的一侧,以用于检测海绵吸盘受到的实时压力,以当实时压力达到预设压力时向机器人本体发射远离信号,以使机器人本体带动取料夹具沿远离工件的方向运动。
11、进一步地,浮动吸放机构包括浮动限位棒,浮动安装板上设置有限位槽,浮动限位棒的一端与固定连接板连接,浮动限位棒的另一端穿设在限位槽内。
12、进一步地,浮动吸放机构包括两个拉伸弹簧,两个拉伸弹簧分别位于浮动安装板的相对两侧,各个拉伸弹簧的两端均分别与固定连接板和浮动安装板连接,且两个拉伸弹簧的延伸方向之间呈一定夹角设置。
13、进一步地,固定板上设置有用于避让导向限位组件的运动部的避让孔,取料夹具还包括接近传感器,接近传感器与机器人本体电连接,接近传感器设置在固定板上且朝向避让孔设置,以用于检测运动部是否到达预定位置,以当运动部到达预定位置时控制机器人本体停止运动并发出异常警报。
14、进一步地,吸盘组件的数量为多个,多个吸盘组件间隔设置于固定板;吸盘驱动组件的数量也为多个,多个吸盘驱动组件间隔设置在固定板上且与多个吸盘组件一一对应地连接。
15、根据本发明的另一方面,提供了一种机器人,包括机器人本体和上述的取料夹具,机器人本体与取料夹具的固定板连接以带动取料夹具运动。
16、应用本发明的技术方案,本发明的取料夹具包括:固定板,固定板用于与机器人的机器人本体连接;浮动吸放机构,浮动吸放机构包括:连接块,连接块安装于固定板;固定连接板,固定连接板与连接块连接且沿远离或靠近连接块的方向可移动地设置;吸盘组件,吸盘组件用于吸取或释放工件,吸盘组件包括浮动安装板和间隔设置在浮动安装板上的多个吸盘部件;浮动接头,浮动接头的两端分别与连接块和吸盘组件连接;吸盘驱动组件,吸盘驱动组件包括多个真空产生器,多个真空产生器间隔设置在固定板上且与多个吸盘部件一一对应地连接,以向相应的吸盘组件送气或从相应的吸盘组件中抽气。这样,本发明的取料夹具通过设置固定板、浮动吸放机构和吸盘驱动组件,能够使浮动吸放机构的吸盘组件的多个吸盘部件在产品倾斜时均跟随工件的角度贴合在产品表面的不同位置处,也能够随着将工件带离料堆后使工件复位成水平姿态,解决了现有技术中的空调外机的连接管的取料难度高,上料时间长且上料效率低的问题。
技术特征:
1.一种取料夹具,其特征在于,包括:
2.根据权利要求1所述的取料夹具,其特征在于,所述浮动吸放机构(9)包括导向限位组件,所述导向限位组件包括可相对运动地连接的运动部和导向部,所述运动部和所述导向部中的一个与所述固定连接板(917)连接,所述运动部和所述导向部中的另一个与所述连接块(91)连接,以沿远离或靠近所述连接块(91)的方向可移动地设置。
3.根据权利要求2所述的取料夹具,其特征在于,所述运动部包括长轴(93),所述导向部包括导向套件(94),所述导向套件(94)安装在所述连接块(91)上,所述长轴(93)安装在所述固定连接板(917)上,且所述长轴(93)穿设在所述导向套件(94)上以相对于所述导向套件(94)可滑动地设置。
4.根据权利要求3所述的取料夹具,其特征在于,所述导向限位组件包括弹性缓冲件(95),所述弹性缓冲件(95)套设在长轴(93)上且位于所述导向套件(94)和所述固定连接板(917)之间。
5.根据权利要求1所述的取料夹具,其特征在于,所述浮动吸放机构(9)包括行程开关(918),所述行程开关(918)位于所述连接块(91)和所述固定连接板(917)之间,所述行程开关(918)的开关主体安装于所述连接块(91)且与所述机器人本体电连接,所述行程开关(918)的触头用于与所述固定连接板(917)接触或分离,以当所述行程开关(918)的触头与所述固定连接板(917)接触时控制所述机器人本体停止运动。
6.根据权利要求1至5中任一项所述的取料夹具,其特征在于,所述多个吸盘部件包括中间吸盘部件,所述中间吸盘部件包括海绵吸盘(912)和海绵吸盘连接杆(914),所述海绵吸盘(912)位于所述浮动安装板(98)的远离所述固定连接板(917)的一侧且通过所述海绵吸盘连接杆(914)与所述浮动安装板(98)连接。
7.根据权利要求6所述的取料夹具,其特征在于,所述多个吸盘部件包括侧部吸盘部件,所述侧部吸盘部件包括花瓣吸盘(911)、缓冲杆(910)和侧部连接板(99),所述侧部连接板(99)与所述浮动安装板(98)连接且平行于所述浮动安装板(98),所述缓冲杆(910)平行于所述海绵吸盘连接杆(914),所述花瓣吸盘(911)通过所述缓冲杆(910)与所述侧部连接板(99)连接且位于所述侧部连接板(99)的远离所述连接块(91)的一侧。
8.根据权利要求7所述的取料夹具,其特征在于,所述侧部吸盘部件的数量为多个,多个所述侧部吸盘部件环绕所述中间吸盘部件间隔设置且均与所述浮动安装板(98)连接。
9.根据权利要求6所述的取料夹具,其特征在于,所述浮动吸放机构(9)包括压力开关(913),所述压力开关(913)与所述机器人本体电连接,所述压力开关(913)安装在所述海绵吸盘(912)上且位于所述海绵吸盘(912)的靠近所述连接块(91)的一侧,以用于检测所述海绵吸盘(912)受到的实时压力,以当实时压力达到预设压力时向所述机器人本体发射远离信号,以使所述机器人本体带动所述取料夹具沿远离所述工件的方向运动。
10.根据权利要求1所述的取料夹具,其特征在于,所述浮动吸放机构(9)包括浮动限位棒(915),所述浮动安装板(98)上设置有限位槽,所述浮动限位棒(915)的一端与所述固定连接板(917)连接,所述浮动限位棒(915)的另一端穿设在所述限位槽内。
11.根据权利要求1所述的取料夹具,其特征在于,所述浮动吸放机构(9)包括两个拉伸弹簧(916),所述两个拉伸弹簧(916)分别位于所述浮动安装板(98)的相对两侧,各个所述拉伸弹簧(916)的两端均分别与所述固定连接板(917)和所述浮动安装板(98)连接,且两个拉伸弹簧(916)的延伸方向之间呈一定夹角设置。
12.根据权利要求2所述的取料夹具,其特征在于,所述固定板(2)上设置有用于避让所述导向限位组件的运动部的避让孔,所述取料夹具还包括接近传感器(8),所述接近传感器(8)与所述机器人本体电连接,所述接近传感器(8)设置在所述固定板(2)上且朝向所述避让孔设置,以用于检测所述运动部是否到达预定位置,以当所述运动部到达所述预定位置时控制所述机器人本体停止运动并发出异常警报。
13.根据权利要求1所述的取料夹具,其特征在于,
14.一种机器人,其特征在于,包括机器人本体和权利要求1至13中任一项所述的取料夹具,所述机器人本体与所述取料夹具的固定板(2)连接以带动所述取料夹具运动。
技术总结
本发明提供了一种取料夹具及机器人,取料夹具包括:固定板,固定板用于与机器人的机器人本体连接;浮动吸放机构,浮动吸放机构包括:连接块,连接块安装于固定板;安装板,安装板与连接块连接且沿远离或靠近连接块的方向可移动地设置;吸盘组件,吸盘组件用于吸取或释放工件,吸盘组件包括浮动安装板和间隔设置在浮动安装板上的多个吸盘部件;浮动接头,浮动接头的两端分别与连接块和吸盘组件连接;吸盘驱动组件,吸盘驱动组件包括多个真空产生器,多个真空产生器间隔设置在固定板上且与多个吸盘部件一一对应地连接,以解决现有技术中的空调外机的连接管的取料难度高,上料时间长且上料效率低的问题。
技术研发人员:康嘉心,许逊,王健,张朋涛
受保护的技术使用者:珠海格力智能装备有限公司
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!