一种柔性化机器人割箱装置及方法与流程
本发明涉及机器人,特别涉及一种柔性化机器人割箱装置及方法。
背景技术:
1、随着工业化进程的推进,越来越多的行业使用机器人取代或协助人类完成某些任务,从而提升效率或降低人工劳动强度。但在在工业化生产的某些环节中,还存在大量繁重的工作由人工完成的现象存在。例如拆装流水线上的废纸箱回收。
2、废纸箱属于可回收垃圾。在废纸箱回收中,往往需要对废纸箱先进行分类、搬运、切割和回收码垛。现有技术中往往需要人工操作。由于废纸箱品种较多,操作比较复杂,信息流不能形成闭环,易出错,自动化程度较低;另外,人工搬运纸箱、割纸箱、废纸箱回收码垛,纸箱转运,劳动强度高,同时,人员使用刀片进行割箱,非常不安全,割箱效率也比较低。
3、鉴于此,本发明提出了一种可实现自动拆码垛、自动割箱及空箱自动堆叠回收的技术方案。
技术实现思路
1、为了解决人工回收废纸箱劳动强度大、安全性不高、且回收效率低下的问题,本发明提出了一种柔性化机器人割箱装置及方法,实现了自动割箱及空箱自动堆叠回收,取代了人工回收,最大程度的减少现场操作人员,可自动进行多品种切换,柔性化更高,同时提升生产效率。本发明的技术方案是这样实施的:
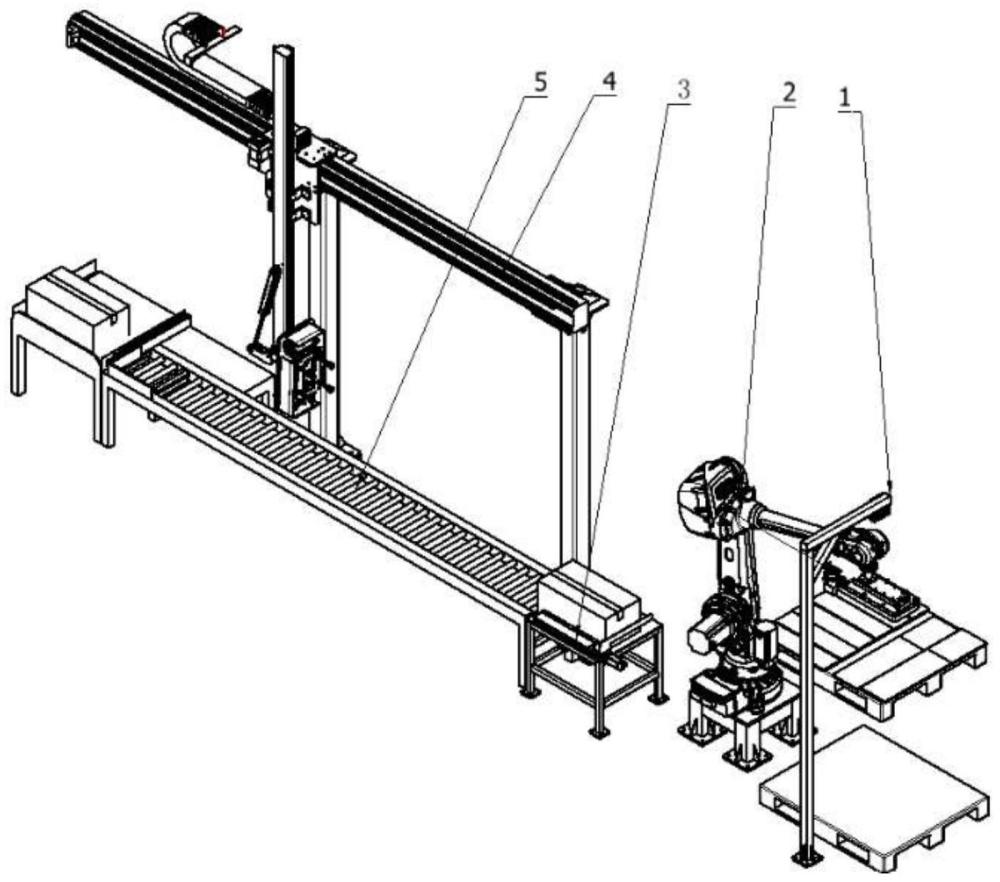
2、一种柔性化机器人割箱装置,包括成像系统、切割机器人、夹紧定位台、桁架机器人、输送装置和控制系统;
3、其中,所述成像系统包括3d相机;
4、所述桁架机器人设置于所述输送装置上方,所述切割机器人设置于所述输送装置一侧,所述夹紧定位台设置于所述输送装置和所述切割机器人之间并连接所述输送装置;
5、所述桁架机器人包括立柱组件、x轴组件、z轴组件和末端抓手组件;
6、所述x轴组件安装于所述立柱组件上,所述z轴组件可沿x轴滑动地安装于所述x轴组件上,所述末端抓手组件可沿z轴滑动地安装于所述z轴组件上;
7、所述切割机器人的机械手上设置有切割组件和吸取组件;
8、所述切割组件设置于所述吸取组件一侧;
9、所述吸取组件包括吸盘吸取结构和海绵吸盘结构;
10、所述夹紧定位台包括定位面、推拉组件、夹紧组件和挡停组件;
11、所述推拉组件与所述夹紧组件在所述定位面上相对放置,所述挡停组件设置于所述定位面一侧;
12、所述3d相机用于拍摄栈板上待吸取纸箱的位置信息和规格信息并上传至控制系统;
13、所述控制系统用于发布任务并控制所述成像系统、所述切割机器人、所述夹紧定位台、所述桁架机器人和所述输送装置运动。
14、优选地,所述末端抓手组件包括第一推杆、曲臂、安装板、内撑机构和浮动吸盘组件;
15、所述第一推杆一端与所述z轴组件固定连接,另一端与所述曲臂转动连接;
16、所述曲臂中心设置有用于与所述z轴组件转动连接的通孔,所述曲臂远离所述第一推杆的一端与所述安装板固定连接;
17、所述内撑机构和所述浮动吸盘组件安装于所述安装板上。
18、优选地,所述内撑机构包括基板、第二推杆、第一导向杆和撑板;
19、所述基板与所述安装板固定连接,所述第二推杆安装于所述基板上;
20、所述第一导向杆一端连接所述撑板,另一端通过导套滑动连接所述基板;
21、所述撑板一端设置有固定倒角。
22、优选地,所述浮动吸盘组件包括基架、弹簧、第二导向杆和浮动吸盘;
23、所述基架与所述安装板固定连接,所述弹簧套于所述第二导向杆上;
24、所述第二导向杆一端通过固定导套与所述基架滑动连接,另一端与所述浮动吸盘固定连接。
25、优选地,所述推拉组件包括动力模组和推板;
26、所述夹紧组件包括第一气缸、第一导轨和夹紧板;
27、所述挡停组件包括第二气缸和挡停板;
28、所述第一气缸、所述第一导轨和所述第二气缸均设置于所述水平面下表面,所述推板、所述夹紧板和所述挡停板均设置于所述水平面的上表面。
29、优选地,所述末端抓手组件还包括传感器组件;所述传感器组件用于检测末端抓手组件吸取的空箱内是否有残留物。
30、优选地,所述切割机器人为六轴机器人。
31、一种柔性化机器人割箱方法,包括步骤如下:
32、s1,搬运机器人将整垛纸箱放置于成像系统下方;
33、s2,3d相机对整垛纸箱进行定位并将定位坐标上传至控制系统;
34、s3,控制系统将整垛纸箱的坐标发送至切割机器人;
35、s4,切割机器人通过海绵吸取结构吸取装有产品的纸箱至夹紧定位台;
36、s5,切割机器人通过吸盘吸取结构吸取纸箱的顶盖和盖板回收码放;
37、s6,输送装置将装有产品的纸箱输送至拆箱机拆箱;
38、s7,传感觉组件检测空箱是否存在残留物;
39、s8,若存在残留物,桁架机器人发出警报并通知人工处理;若无残留,桁架机器人抓取空箱至切割工位;
40、s19,切割机器人切割空箱底盖,并将通过吸盘吸取结构将底盖、箱身码垛;
41、s10,切割机器人将顶盖、盖板、底盖和箱身堆叠至空栈板;
42、s11,搬运机器人将空箱码垛后的栈板转运;
43、s12,回到s1或结束任务。
44、本发明解决了自动拆码垛、自动割箱及空箱自动堆叠回收的问题,取代人工,最大程度的减少现场操作人员,可自动进行多品种切换,柔性化更高,同时提升生产效率。。
45、本发明将六轴机器人和3d相机结合,通过拍照比对,可实现纸箱位置标定、拆垛、码垛、纸箱类型识别功能,3d相机内的工控系统将纸箱坐标点信息上传至控制系统,控制系统给切割机器人发送指令,切割机器人的机械手协同做出相应的动作,可应对更多的应用场景,灵活性更高,智能化程度更高;
46、本发明中的切割机器人的机械手末端设置有用于吸取整箱的海绵吸取结构、抓取空箱的吸盘吸取结构和用于将空箱切割的切割组件,可实现满箱吸取、箱顶底盖切割、空箱回收码垛;
47、本发明中的夹紧定位台可实现纸箱的自动夹紧定位,便于机械手携带割刀对顶盖切割,还可实现割顶结束将整箱推至下一输送工位;
48、纸箱放置到夹紧定位台上,挡停组件的第二气缸伸出,夹紧组件的第一气缸收回将纸箱拉向推拉组件,推拉组件由动力模组带动推板将纸箱推至挡停板,从而实现纸箱的夹紧与定位。
49、本发明中,桁架机器人的末端抓手组件负责将空箱吸附并抓取纸箱转运至割底工位进行机械手割底作业,桁架机器人的末端抓手组件设置有内撑机构和浮动吸盘组件,内撑机构具有浮动功能,可兼容多种规格尺寸的箱子,切割箱底时,内撑机构内撑纸箱及浮动吸盘机构吸附箱底,待切割机器人将箱底割开后切割机器人的机械手的吸盘吸附箱底并码垛,之后切割机器人的机械手再将箱身接管并码垛。
技术特征:
1.一种柔性化机器人割箱装置,其特征在于,包括成像系统、切割机器人、夹紧定位台、桁架机器人、输送装置和控制系统;
2.根据权利要求1所述的柔性化机器人割箱装置,其特征在于,所述末端抓手组件包括第一推杆、曲臂、安装板、内撑机构和浮动吸盘组件;
3.根据权利要求2所述的柔性化机器人割箱装置,其特征在于,所述内撑机构包括基板、第二推杆、第一导向杆和撑板;
4.根据权利要求3所述的柔性化机器人割箱装置,其特征在于,所述浮动吸盘组件包括基架、弹簧、第二导向杆和浮动吸盘;
5.根据权利要求1所述的柔性化机器人割箱装置,其特征在于,所述推拉组件包括动力模组和推板;
6.根据权利要求1所述的柔性化机器人割箱装置,其特征在于,所述末端抓手组件还包括传感器组件;所述传感器组件用于检测末端抓手组件吸取的空箱内是否有残留物。
7.根据权利要求1所述的柔性化机器人割箱装置,其特征在于,所述切割机器人为六轴机器人。
8.一种柔性化机器人割箱方法,其特征在于,包括步骤如下:
技术总结
本发明涉及机器人技术领域的一种柔性化机器人割箱装置及方法,装置包括成像系统、切割机器人、夹紧定位台、桁架机器人、输送装置和控制系统;成像系统包括3D相机;桁架机器人包括立柱组件、X轴组件、Z轴组件和末端抓手组件;X轴组件安装于立柱组件上,Z轴组件可沿X轴滑动地安装于X轴组件上,末端抓手组件可沿Z轴滑动地安装于Z轴组件上。切割机器人包括柔性切割组件和吸取组件;3D相机用于拍摄栈板上待吸取纸箱的位置信息和规格信息并上传至控制系统;本发明实现了自动割箱及空箱自动堆叠回收,取代了人工回收,最大程度的减少现场操作人员,可自动进行多品种切换,柔性化更高,同时提升生产效率。
技术研发人员:孙鹿奇,李洪涛,董易,吕云振,温秋阳
受保护的技术使用者:上海飒智智能科技有限公司
技术研发日:
技术公布日:2024/4/22
- 还没有人留言评论。精彩留言会获得点赞!