一种机器人控制方法、装置、电子设备和存储介质与流程
本申请涉及计算机,尤其涉及一种机器人控制方法、装置、电子设备和计算机存储介质。
背景技术:
1、相关技术中,料箱机器人在取货完成后,会按照路径陆续进入工作站的排队位等待卸料,参见图1,若料箱机器人1初次选择“第1次路径”进入排队位,则会先旋转再尝试进入排队位,如果该排队位已有其他料箱机器人,则需要换到“第2次路径”进入排队位,依次尝试。从上述过程可以看出,料箱机器人在进入排队位之前会先旋转为竖直方向,发现无法进入该排队位后,再转回水平方向移动到其他路径入口依次尝试进入,即,料箱机器人在进入排队位失败时会产生无效的旋转动作,这样,不仅会浪费料箱机器人的电池电量,也会影响料箱机器人的作业效率。
技术实现思路
1、本申请实施例提供一种机器人控制方法、装置、电子设备和计算机存储介质。
2、本申请实施例的技术方案是这样实现的:
3、本申请实施例提供了一种机器人控制方法,所述方法包括:
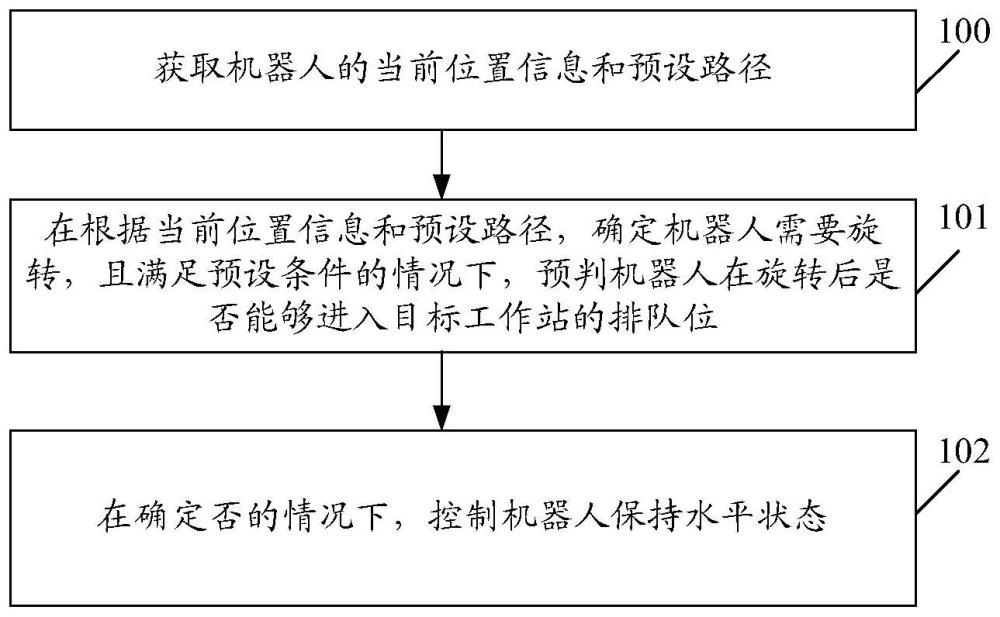
4、获取机器人的当前位置信息和预设路径;
5、在根据所述当前位置信息和所述预设路径,确定所述机器人需要旋转,且满足预设条件的情况下,预判所述机器人在旋转后是否能够进入目标工作站的排队位;所述预设条件表征所述机器人位于所述目标工作站的排队位前置区,且所述机器人的终点为所述目标工作站;
6、在确定否的情况下,控制所述机器人保持水平状态。
7、在一些实施例中,所述预判所述机器人在旋转后是否能够进入目标工作站的排队位,包括:
8、获取所述机器人的尺寸信息;
9、根据所述尺寸信息,确定所述机器人在旋转后的占用面积;
10、根据所述占用面积,预判所述机器人在旋转后是否能够进入所述目标工作站的排队位。
11、在一些实施例中,所述根据所述占用面积,预判所述机器人在旋转后是否能够进入所述目标工作站的排队位,包括:
12、确定所述占用面积是否会与所述排队位上的已有机器人的占用面积发生相交;
13、在确定是的情况下,预判所述机器人在旋转后不能进入所述排队位;
14、在确定否的情况下,预判所述机器人在旋转后能进入所述排队位。
15、在一些实施例中,所述尺寸信息包括长度和宽度,所述根据所述尺寸信息,确定所述机器人在旋转后的占用面积,包括:
16、根据所述尺寸信息,确定所述机器人在旋转后的移动路径;
17、根据所述移动路径和所述当前位置信息,确定所述机器人在旋转后的移动位置;
18、根据所述移动位置,确定所述机器人在旋转后的占用面积。
19、在一些实施例中,所述方法还包括:
20、获取所述移动路径对应的地码集合;所述地码集合包括至少一个地码;
21、确定是否能够对所述地码集合中的全部地码进行锁定;
22、相应地,所述根据所述移动路径和所述当前位置信息,确定所述机器人在旋转后的移动位置,包括:
23、在确定能够对所述地码集合中的全部地码进行锁定的情况下,根据所述移动路径和所述当前位置信息,确定所述机器人在旋转后的移动位置。
24、在一些实施例中,所述预设路径包括一个或多个旋转位置点,所述根据所述当前位置信息和所述预设路径,确定所述机器人需要旋转,包括:
25、根据所述当前位置信息,确定所述机器人是否位于所述预设路径上的旋转位置点,在确定是的情况下,确定所述机器人需要旋转。
26、在一些实施例中,所述方法还包括:
27、若预判所述机器人在旋转后能够进入所述目标工作站的排队位,则控制所述机器人从水平方向旋转至竖直方向。
28、本申请实施例提供一种机器人控制装置,所述装置包括获取模块、预判模块和控制模块,其中,
29、获取模块,用于获取机器人的当前位置信息和预设路径;
30、预判模块,用于在根据所述当前位置信息和所述预设路径,确定所述机器人需要旋转,且满足预设条件的情况下,预判所述机器人在旋转后是否能够进入目标工作站的排队位;所述预设条件表征所述机器人位于所述目标工作站的排队位前置区,且所述机器人的终点为所述目标工作站;
31、控制模块,用于在确定否的情况下,控制所述机器人保持水平状态。
32、本申请实施例提供一种电子设备,所述设备包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现前述一个或多个技术方案提供的机器人控制方法。
33、本申请实施例提供一种计算机存储介质,所述计算机存储介质存储有计算机程序;所述计算机程序被执行后能够实现前述一个或多个技术方案提供的机器人控制方法。
34、本申请实施例提供一种机器人控制方法、装置、电子设备和计算机存储介质,该方法包括:获取机器人的当前位置信息和预设路径;在根据所述当前位置信息和所述预设路径,确定所述机器人需要旋转,且满足预设条件的情况下,预判所述机器人在旋转后是否能够进入目标工作站的排队位;所述预设条件表征所述机器人位于所述目标工作站的排队位前置区,且所述机器人的终点为所述目标工作站;在确定否的情况下,控制所述机器人保持水平状态。
35、可以看出,本申请实施例中,在确定机器人需要旋转的情况下,如果确定机器人要进入目标工作站的排队位,则会在进入之前预判该机器人在旋转后是否能够进入排队位,如果预判不能进入,则控制所述机器人保持水平状态,即,机器人此时并不会进行旋转;如此,可以解决相关技术中机器人在旋转后无法进入排队位而导致的无效旋转问题,进而,可以节省机器人的电池电量,提升机器人的作业效率。
技术特征:
1.一种机器人控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述预判所述机器人在旋转后是否能够进入目标工作站的排队位,包括:
3.根据权利要求2所述的方法,其特征在于,所述根据所述占用面积,预判所述机器人在旋转后是否能够进入所述目标工作站的排队位,包括:
4.根据权利要求2所述的方法,其特征在于,所述尺寸信息包括长度和宽度,所述根据所述尺寸信息,确定所述机器人在旋转后的占用面积,包括:
5.根据权利要求4所述的方法,其特征在于,所述方法还包括:
6.根据权利要求1所述的方法,其特征在于,所述预设路径包括一个或多个旋转位置点,所述根据所述当前位置信息和所述预设路径,确定所述机器人需要旋转,包括:
7.根据权利要求1所述的方法,其特征在于,所述方法还包括:
8.一种机器人控制装置,其特征在于,所述装置包括:
9.一种电子设备,其特征在于,所述设备包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现权利要求1至7任一项所述的方法。
10.一种计算机存储介质,其上存储有计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求1至7任一项所述的方法。
技术总结
本申请提供一种机器人控制方法、装置、电子设备和计算机存储介质,该方法包括:获取机器人的当前位置信息和预设路径;在根据所述当前位置信息和所述预设路径,确定所述机器人需要旋转,且满足预设条件的情况下,预判所述机器人在旋转后是否能够进入目标工作站的排队位;所述预设条件表征所述机器人位于所述目标工作站的排队位前置区,且所述机器人的终点为所述目标工作站;在确定否的情况下,控制所述机器人保持水平状态。
技术研发人员:岳兴忠
受保护的技术使用者:北京京东远升科技有限公司
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!