用于下肢外骨骼机器人的气动人工肌肉结构
本发明涉及动力外骨骼,具体为用于下肢外骨骼机器人的气动人工肌肉结构。
背景技术:
1、下肢外骨骼机器人是一种辅助支撑设备,通过动力元件辅助主体做出相应的动作,气动人工肌肉在外骨骼中担任主要的动力输出元件,主要使用气体动力作为输入能源,人工肌肉在一定程度上模仿了人体的肌肉收缩动作,使机器人的动作更加灵活便捷,现有用于下肢外骨骼机器人的气动人工肌肉结构基本可以满足日常的使用需求,但仍存在一定的不足之处,其一,现有用于下肢外骨骼机器人的气动人工肌肉结构简单,通过柔性气囊的收缩膨胀完成肌肉动作,难以准确模拟骨骼的弯曲拉伸动作,仿真效果差,影响了肌肉结构的实用性;其二,人工肌肉结构中的外部柔性管大多固定在结构的两端,安装拆卸过程繁琐,增大了肌肉结构的维护成本;其三,现有气动人工肌肉结构在使用前需要配合人工将结构固定在进气结构上,装配过程繁琐,增大了工作人员的劳动强度,同时人工装配难以保障气动元件的密封性;因此设计用于下肢外骨骼机器人的气动人工肌肉结构是很有必要的。
技术实现思路
1、本发明的目的在于提供用于下肢外骨骼机器人的气动人工肌肉结构,以解决上述背景技术中提出的问题。
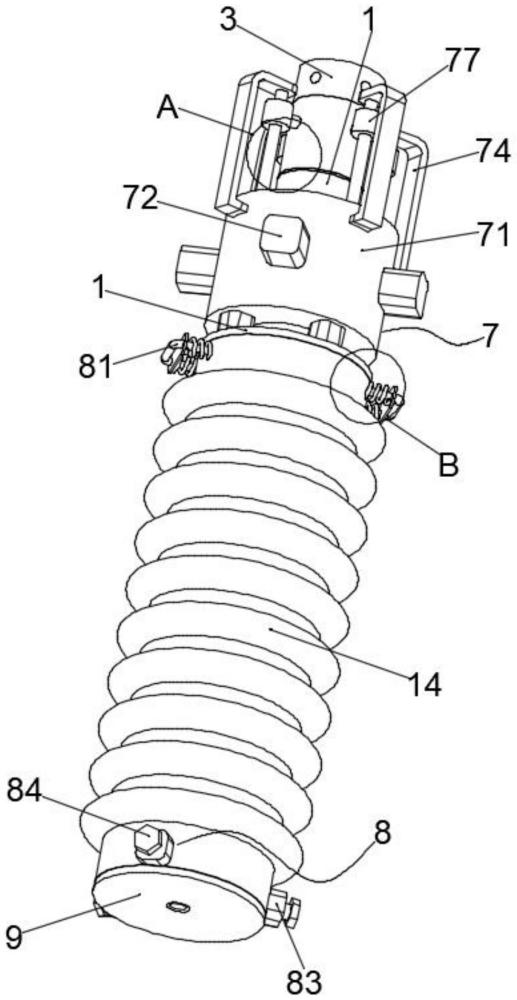
2、为实现上述目的,本发明提供如下技术方案:用于下肢外骨骼机器人的气动人工肌肉结构,包括气动台、密封环、进气接件、主骨组件、活塞腔、仿真运动组件、气动连接组件、固定装夹组件、底盘、进气管、连接管、弹性关节仓、第一接环、波纹管和第二接环,所述主骨组件由第一支臂、第二支臂和柔性气囊组成,第一支臂上转动连接有第二支臂,且第二支臂的内部开设有活塞腔,第二支臂和第一支臂上对称设置有柔性气囊,活塞腔与第一支臂内部开设的气道相互连通,第一支臂的两侧对称设置有仿真运动组件中的气动滑道,所述仿真运动组件由气动滑道、弯曲件、固定板、支撑架和活塞杆组成。
3、优选的,所述气动滑道中滑动连接有弯曲件,且弯曲件的一端设置有固定板,固定板固定在第二支臂上,气动滑道和第一支臂的一端均固定套接在气动台的底部。
4、优选的,所述第二支臂的一端固定套接有支撑架,且支撑架中滑动连接有活塞杆,活塞杆的一端滑动连接在活塞腔中,且活塞杆的另一端通过螺栓固定连接有底盘。
5、优选的,所述气动台底部配合套接有进气管,且气动台的内部嵌入安装有连接管,连接管分别连通进气管、第一支臂和气动滑道,且进气管的一端配合连接在弹性关节仓中,弹性关节仓的两端分别滑动在第一支臂和第二支臂上,且弹性关节仓与弯曲件的连接处开设有通槽,气动台的顶部设置有密封环,且气动台上滑动连接有气动连接组件中的连接套筒。
6、优选的,所述气动滑道由连接套筒、锁定气缸、装夹块、丝杠支架、丝杠电机、紧固丝杠和连接块组成,连接套筒侧壁上均匀开设的通槽中固定套接有锁定气缸,且锁定气缸的输出端设置有装夹块,装夹块贴合在气动台上。
7、优选的,所述连接套筒底部均匀开设的凹槽中固定套接有丝杠电机,且丝杠电机的输出端固定连接有紧固丝杠,连接套筒与紧固丝杠的连接处开设有通槽,且紧固丝杠的顶端转动连接在丝杠支架上,丝杠支架固定在连接套筒的侧壁上,紧固丝杠上设置有连接块,且连接块内部嵌入安装的滚珠螺母与紧固丝杠相互配合连接,连接块的一侧固定在进气接件上。
8、优选的,所述气动台的底部设置有第一接环,且第一接环上套接有波纹管,波纹管顶部均匀开设的通槽中滑动连接有固定装夹组件中的锁止架,所述固定装夹组件由锁止架、锁止弹簧、固定台和装夹螺栓组成。
9、优选的,所述锁止架上对称设置有锁止弹簧,且锁止弹簧的底端固定在波纹管的顶端,锁止架的一端滑动连接在第一接环上均匀开设的通孔中,波纹管的底部套接在第二接环上,且第二接环固定在底盘上,底盘的底端均匀设置有固定台,且固定台上开设的螺纹孔中配合连接有装夹螺栓,装夹螺栓的一端贴合在第二接环上。
10、与现有技术相比,本发明的有益效果是:该用于下肢外骨骼机器人的气动人工肌肉结构,利用设置的主骨组件在结构的内部进行支撑,第一支臂中的气道将气体压入或吸出第二支臂,带动活塞杆进行拉伸或收缩运动,同时气动滑道通过气压作用于弯曲件,使弯曲件在气动滑道中滑动,进而利用弯曲件带动第二支臂在第一支臂上转动,进行弯曲运动,可以准确模拟骨骼的弯曲拉伸动作,提高了结构的仿真效果,保障了肌肉结构的实用性;利用设置的装夹螺栓将波纹管的一端固定在第二接环上,同时锁止弹簧弹力作用于锁止架,通过锁止架的一端紧压在第一接环上开设的通孔中,拉伸锁止弹簧使锁止弹簧与第一接环脱离,同时转动装夹螺栓即可解除对波纹管的固定,安装拆卸过程简单,便于对内部的结构进行检修,从而降低了结构的维护成本;利用设置的锁定气缸带动装夹块压紧气动台,对连接套筒进行固定,随后丝杠电机带动紧固丝杠转动,通过紧固丝杠与连接块的相互配合,带动进气接件压紧密封环的同时将连接管套接在进气接件中,无需人工参与密封装配的过程,保障了装配后结构的密封性能,同时减轻了工人员装配肌肉结构的劳动强度。
技术特征:
1.用于下肢外骨骼机器人的气动人工肌肉结构,包括气动台(1)、密封环(2)、进气接件(3)、主骨组件(4)、活塞腔(5)、仿真运动组件(6)、气动连接组件(7)、固定装夹组件(8)、底盘(9)、进气管(10)、连接管(11)、弹性关节仓(12)、第一接环(13)、波纹管(14)和第二接环(15),其特征在于:所述主骨组件(4)由第一支臂(41)、第二支臂(42)和柔性气囊(43)组成,第一支臂(41)上转动连接有第二支臂(42),且第二支臂(42)的内部开设有活塞腔(5),第二支臂(42)和第一支臂(41)上对称设置有柔性气囊(43),活塞腔(5)与第一支臂(41)内部开设的气道相互连通,第一支臂(41)的两侧对称设置有仿真运动组件(6)中的气动滑道(61),所述仿真运动组件(6)由气动滑道(61)、弯曲件(62)、固定板(63)、支撑架(64)和活塞杆(65)组成。
2.根据权利要求1所述的用于下肢外骨骼机器人的气动人工肌肉结构,其特征在于:所述气动滑道(61)中滑动连接有弯曲件(62),且弯曲件(62)的一端设置有固定板(63),固定板(63)固定在第二支臂(42)上,气动滑道(61)和第一支臂(41)的一端均固定套接在气动台(1)的底部。
3.根据权利要求2所述的用于下肢外骨骼机器人的气动人工肌肉结构,其特征在于:所述第二支臂(42)的一端固定套接有支撑架(64),且支撑架(64)中滑动连接有活塞杆(65),活塞杆(65)的一端滑动连接在活塞腔(5)中,且活塞杆(65)的另一端通过螺栓固定连接有底盘(9)。
4.根据权利要求2所述的用于下肢外骨骼机器人的气动人工肌肉结构,其特征在于:所述气动台(1)底部配合套接有进气管(10),且气动台(1)的内部嵌入安装有连接管(11),连接管(11)分别连通进气管(10)、第一支臂(41)和气动滑道(61),且进气管(10)的一端配合连接在弹性关节仓(12)中,弹性关节仓(12)的两端分别滑动在第一支臂(41)和第二支臂(42)上,且弹性关节仓(12)与弯曲件(62)的连接处开设有通槽,气动台(1)的顶部设置有密封环(2),且气动台(1)上滑动连接有气动连接组件(7)中的连接套筒(71)。
5.根据权利要求4所述的用于下肢外骨骼机器人的气动人工肌肉结构,其特征在于:所述气动滑道(61)由连接套筒(71)、锁定气缸(72)、装夹块(73)、丝杠支架(74)、丝杠电机(75)、紧固丝杠(76)和连接块(77)组成,连接套筒(71)侧壁上均匀开设的通槽中固定套接有锁定气缸(72),且锁定气缸(72)的输出端设置有装夹块(73),装夹块(73)贴合在气动台(1)上。
6.根据权利要求5所述的用于下肢外骨骼机器人的气动人工肌肉结构,其特征在于:所述连接套筒(71)底部均匀开设的凹槽中固定套接有丝杠电机(75),且丝杠电机(75)的输出端固定连接有紧固丝杠(76),连接套筒(71)与紧固丝杠(76)的连接处开设有通槽,且紧固丝杠(76)的顶端转动连接在丝杠支架(74)上,丝杠支架(74)固定在连接套筒(71)的侧壁上,紧固丝杠(76)上设置有连接块(77),且连接块(77)内部嵌入安装的滚珠螺母与紧固丝杠(76)相互配合连接,连接块(77)的一侧固定在进气接件(3)上。
7.根据权利要求5所述的用于下肢外骨骼机器人的气动人工肌肉结构,其特征在于:所述气动台(1)的底部设置有第一接环(13),且第一接环(13)上套接有波纹管(14),波纹管(14)顶部均匀开设的通槽中滑动连接有固定装夹组件(8)中的锁止架(81),所述固定装夹组件(8)由锁止架(81)、锁止弹簧(82)、固定台(83)和装夹螺栓(84)组成。
8.根据权利要求7所述的用于下肢外骨骼机器人的气动人工肌肉结构,其特征在于:所述锁止架(81)上对称设置有锁止弹簧(82),且锁止弹簧(82)的底端固定在波纹管(14)的顶端,锁止架(81)的一端滑动连接在第一接环(13)上均匀开设的通孔中,波纹管(14)的底部套接在第二接环(15)上,且第二接环(15)固定在底盘(9)上,底盘(9)的底端均匀设置有固定台(83),且固定台(83)上开设的螺纹孔中配合连接有装夹螺栓(84),装夹螺栓(84)的一端贴合在第二接环(15)上。
技术总结
本发明公开了用于下肢外骨骼机器人的气动人工肌肉结构,包括气动台、密封环、进气接件、主骨组件、仿真运动组件、气动连接组件、固定装夹组件、连接管、弹性关节仓和波纹管,所述主骨组件由第一支臂、第二支臂和柔性气囊组成,本发明,利用主骨组件进行支撑,同时与仿真运动组件相互配合模拟骨骼的弯曲拉伸动作,提高了结构的仿真效果,保障了肌肉结构的实用性;利用设置的固定装夹组件将波纹管固定在结构的外部,安装拆卸过程简单,便于对内部的结构进行检修,降低了结构的维护成本;利用设置的气动连接组件自动进行结构的密封连接,无需人工参与密封装配的过程,保障了装配后结构的密封性能,同时减轻了工人员装配肌肉结构的劳动强度。
技术研发人员:钟佩思,戴鹏,张超,王晓,刘梅,张大卫,杨世浩
受保护的技术使用者:山东科技大学
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!