混凝土高塔维修机器人
本发明属于桥梁维护,具体是涉及一种混凝土高塔维修机器人。
背景技术:
1、在当前工业化和城市化快速发展的背景下,桥梁、电视塔、观测塔等高塔结构物广泛存在于城市建设中。由于这些高塔结构物日常承受着风力、雨水腐蚀、地震和材料老化等多种外界因素的影响,随着时间的推移它们的结构安全性会逐渐降低。因此,对这些建筑进行定期维护与修复变得至关重要。
2、传统的高塔维护方法主要依赖于人工作业,如使用吊篮、悬挂绳索或搭建脚手架等方式。然而,这些方法不仅效率低下,成本高昂,而且还存在很大的安全风险。特别是在恶劣天气条件下,这样的工作环境对操作人员的生命安全构成了极大的威胁。同时,高空作业环境的复杂性也限制了维护作业的精准度和质量。
3、当前市场上,虽已有一些高塔维修机器人产品,但它们仍存在许多问题和局限性,例如不能精确定位到损伤位置、维修范围有限、对复杂表面的适应性差、机器人自身稳定性和安全性不足等。面对这些问题,迫切需要开发一种新型高塔维修机器人,以适应更加复杂多变的高塔维修环境,并提供更加安全可靠、高效便捷的维修服务。
4、因此,本专利旨在提出一种混凝土高塔维修机器人,其通过先进的技术设计实现对高塔外壁各类病害(如开裂、涂装破损等)的自动检测与维修,同时通过有效的稳定和吸附系统确保作业过程的安全与精确。该机器人将彻底改变高塔维修行业的现状,使之更加智能化、自动化和安全化。
技术实现思路
1、(一)要解决的技术问题
2、本发明主要针对传统人工高空作业在维护高塔时存在的低效率、高成本和安全风险等问题,提出了一种混凝土高塔维修机器人,其目的是利用自动化技术实现高效、精准且安全的高塔表面检测与维修作业。
3、(二)技术方案
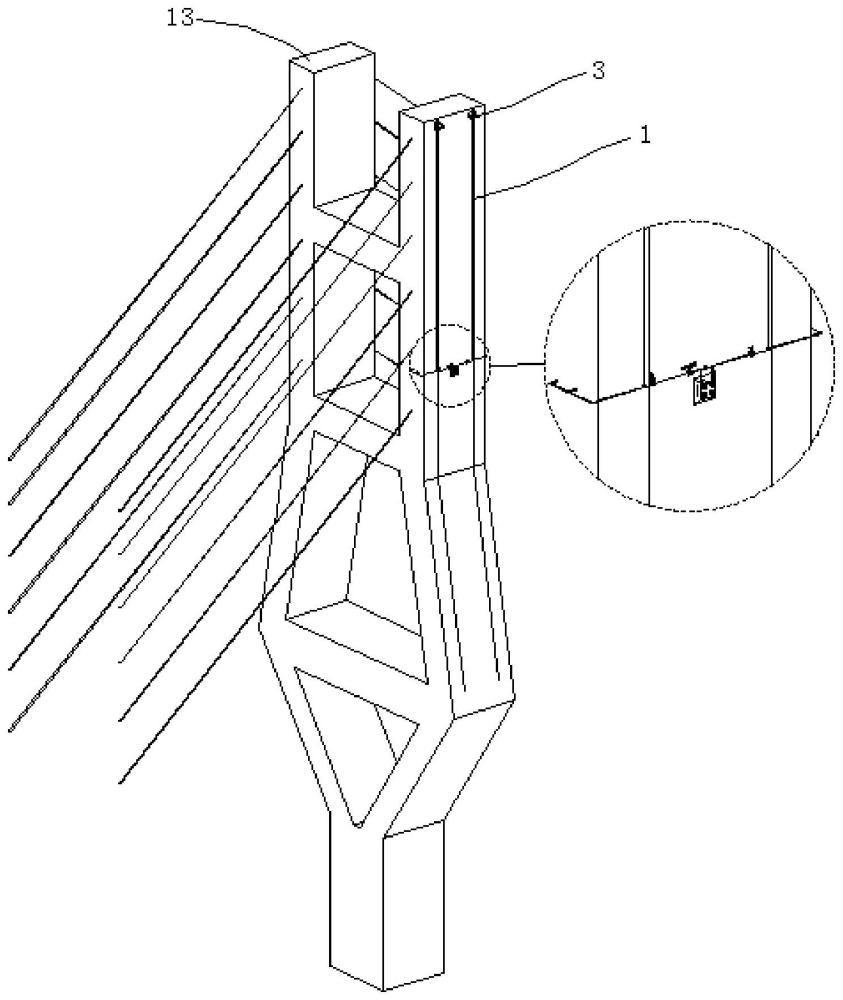
4、为实现上述目的,本发明提供了一种混凝土高塔维修机器人,包括:收绳器和缠绕在收绳器上的线缆,所述线缆的一端穿过吊环滑轨后连接支撑杆,所述吊环滑轨固定在高塔外壁,所述支撑杆包括第一杆体、第二杆体、第三杆体,所述第一杆体与所述第二杆体之间通过第一伸缩组件相连,所述第二杆体与所述第三杆体之间通过第二伸缩组件相连,所述第一杆体和所述第三杆体相对平行、且分别与所述第二杆体呈垂直设置;所述第一杆体和所述第三杆体上均设置有用于抵触高塔壁面的第一移动辊;所述第二杆体外套设有作业模块和负压模块,所述负压模块具有吸附腔、电源模块和负压风机,所述负压风机的输出端连接螺旋桨,所述螺旋桨安装在所述吸附腔中,以由转动的所述螺旋桨在吸附腔中形成负压。
5、进一步地,所述线缆的另一端连接地面电源,所述第二杆体内设置有多根与所述线缆电连接的长导体,所述第二杆体中设置有沿所述第二杆体长度方向的滑槽,所述作业模块和负压模块套均设在所述第二杆体外、且具有伸入所述滑槽中与多根所述长导体滑动接触的电连接部,所述电源模块通过所述电连接部与所述长导体电连接,以由所述地面电源为所述负压模块和作业模块供电。
6、进一步地,所述作业模块包括基面打磨模块、辊涂灌胶模块、喷涂防腐漆模块,所述基面打磨设置有电机,所述电机通过所述电连接部与所述长导体电连接。
7、进一步地,所述负压模块、作业模块朝向高塔外壁的一侧面设置有行走装置。
8、进一步地,所述第二杆体上设置有用于抵触高塔壁面的多个第二移动辊,多个所述第二移动辊将所述第二杆体分成多段,每一段分别配置一个所述作业模块。
9、进一步地,多个所述第二移动辊与所述第二杆体滑动设置。
10、进一步地,所述第一伸缩组件上设置有滑轮,所述第二杆体上设置有自动收卷盘,所述自动收卷盘上的线体穿过所述作业模块,且与所述作业模块固定连接,所述作业模块另一端的所述线体绕过所述滑轮。
11、进一步地,所述线缆的另一端还连接控制终端。
12、(三)有益效果
13、与现有技术相比,本发明提供的一种混凝土高塔维修机器人,通过采用集成的支撑杆结构、智能吸附负压模块和可伸缩组件设计,实现了对高塔外壁进行稳定夹持和精确移动的同时,可以通过自动化作业模块进行快速诊断和有效维修,大幅度提升了作业效率和安全性,并降低了整体维护成本。
技术特征:
1.一种混凝土高塔维修机器人,其特征在于,包括:收绳器和缠绕在收绳器上的线缆,所述线缆的一端穿过吊环滑轨后连接支撑杆,所述吊环滑轨固定在高塔外壁,所述支撑杆包括第一杆体、第二杆体、第三杆体,所述第一杆体与所述第二杆体之间通过第一伸缩组件相连,所述第二杆体与所述第三杆体之间通过第二伸缩组件相连,所述第一杆体和所述第三杆体相对平行、且分别与所述第二杆体呈垂直设置;所述第一杆体和所述第三杆体上均设置有用于抵触高塔壁面的第一移动辊;所述第二杆体外套设有作业模块和负压模块,所述负压模块具有吸附腔、电源模块和负压风机,所述负压风机的输出端连接螺旋桨,所述螺旋桨安装在所述吸附腔中,以由转动的所述螺旋桨在吸附腔中形成负压。
2.根据权利要求1所述的一种混凝土高塔维修机器人,其特征在于,所述线缆的另一端连接地面电源,所述第二杆体内设置有多根与所述线缆电连接的长导体,所述第二杆体中设置有沿所述第二杆体长度方向的滑槽,所述作业模块和负压模块套均设在所述第二杆体外、且具有伸入所述滑槽中与多根所述长导体滑动接触的电连接部,所述电源模块通过所述电连接部与所述长导体电连接,以由所述地面电源为所述负压模块和作业模块供电。
3.根据权利要求2所述的一种混凝土高塔维修机器人,其特征在于,所述作业模块包括基面打磨模块、辊涂灌胶模块、喷涂防腐漆模块,所述基面打磨设置有电机,所述电机通过所述电连接部与所述长导体电连接。
4.根据权利要求2所述的一种混凝土高塔维修机器人,其特征在于,所述负压模块、作业模块朝向高塔外壁的一侧面设置有行走装置。
5.根据权利要求3所述的一种混凝土高塔维修机器人,其特征在于,所述第二杆体上设置有用于抵触高塔壁面的多个第二移动辊,多个所述第二移动辊将所述第二杆体分成多段,每一段分别配置一个所述作业模块。
6.根据权利要求5所述的一种混凝土高塔维修机器人,其特征在于,多个所述第二移动辊与所述第二杆体滑动设置。
7.根据权利要求2所述的一种混凝土高塔维修机器人,其特征在于,所述第一伸缩组件上设置有滑轮,所述第二杆体上设置有自动收卷盘,所述自动收卷盘上的线体穿过所述作业模块,且与所述作业模块固定连接,所述作业模块另一端的所述线体绕过所述滑轮。
8.根据权利要求2所述的一种混凝土高塔维修机器人,其特征在于,所述线缆的另一端还连接控制终端。
技术总结
本发明属于桥梁维护技术领域,具体是涉及一种混凝土高塔维修机器人,包括收绳器和缠绕在其上的线缆。线缆一端穿过吊环滑轨连接支撑杆,固定在高塔外壁。支撑杆包括第一、第二、第三杆体,通过伸缩组件连接。第一、第三杆体上均设置有用于抵触高塔壁面的第一移动辊。第二杆体外套设有作业模块和负压模块,具有吸附腔、电源模块和负压风机。负压风机输出端连接螺旋桨,在吸附腔中形成负压。该机器人实现了稳定夹持和精确移动,通过自动化作业模块进行快速诊断和有效维修,提升了作业效率和安全性,降低了整体成本。
技术研发人员:杨大伟,李冬冬,赵强胜,胡定宇,姜秀蕊,贺英吉
受保护的技术使用者:哈尔滨工业大学重庆研究院
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!