一种基于气压驱动的变刚度软体机器人骨架的制作方法
本发明涉及机器人,具体是一种基于气压驱动的变刚度软体机器人骨架。
背景技术:
1、自第一台工业机器人问世以来,已经历了大半个世纪,刚体机器人研究体系已经十分成熟,且在工业方面,机器人的应用得到了全面的发展和推广。随着人类生活品质的提高,希望机器人不仅能在工业方面得到运用,在日常生活中也能有实际的运用。但由于目前刚体机器人的交互性不强,且驱动方式大多为电机驱动,运动时会产生较大的惯性,在与外界环境接触时不可避免的会发生刚性碰撞,产生一定的危险,所以需要机器人能够和人、环境进行直接交互,避免产生类似的问题。
2、近年来科学家设计了各种软体触手型机器人或连续触手型机器人来解决这一问题。软体触手型机器人由柔性材料制作而成,软体触手型机器人可实现很多刚性机器人不能实现的运动,如卷曲、扭转、伸展、柔性接触等操作。软体机器人的高柔性与无限自由度的特点,是牺牲其自身刚度换来的。也正是因为软体机器人自身刚度不足的原因使得其在日常生活中很难得到运用。因此提出一种能够改变软体机器人自身刚度的基于气压驱动的变刚度软体机器人骨架。
技术实现思路
1、本发明的目的在于提供一种基于气压驱动的变刚度软体机器人骨架,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
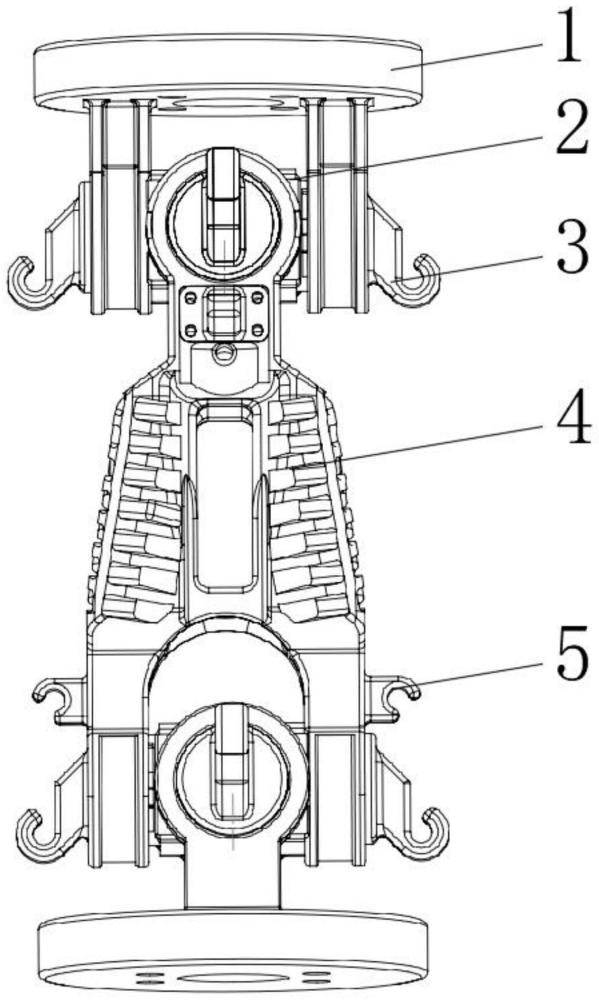
3、一种基于气压驱动的变刚度软体机器人骨架,包括两个相对设置的端盖、对应设置在两个端盖一侧的万向轴节以及设置在两个万向轴节之间的骨架,两个所述万向轴节的四周均设置有转轴挂钩,所述骨架两端的两侧均固定有骨架挂钩,所述骨架的四周均设置有气动肌肉,所述万向轴节的四周均设置有螺钉,四个所述螺钉的一端均固定有贴片,四个所述贴片的一侧均贴合放置有硅胶气囊;
4、所述转轴挂钩包括转动挂钩和转轴,所述转动挂钩固定在所述转轴的外侧,所述转轴挂钩一端的两侧均一体成型有连接板,所述转轴挂钩通过两个所述连接板与所述万向轴节固定连接,所述转轴的内部设置有空腔,所述硅胶气囊塞入所述转轴内部的空腔中,所述转轴内壁的两侧均设置有开口且开口内均活动连接有锁紧片,两个所述锁紧片分别设置于所述硅胶气囊的两侧,所述锁紧片由弹性材料制成。
5、作为本发明进一步的方案:所述转轴内壁对应两个所述锁紧片的一侧均设置有开口,两个所述锁紧片的一端均固定在开口内,且另一端均活动连接在开口内。
6、作为本发明再进一步的方案:所述转轴内壁对应两个所述锁紧片的一侧均开设有通槽,所述通槽内部的两侧均开设有导向槽,所述锁紧片对应所述导向槽的一侧均固定有导块,所述导块滑动连接在所述导向槽中,所述锁紧片的内侧通过支架固定有弧形夹板,所述弧形夹板的形状与所述硅胶气囊的外形相适配且所述弧形夹板贴合设置在所述硅胶气囊的外侧,所述弧形夹板的内侧设置有软垫。
7、作为本发明再进一步的方案:所述硅胶气囊的两端分别套设有第一限位套和第二限位套,所述转轴的内部设置有空腔,所述第一限位套塞入所述转轴内部的空腔中且与所述转轴之间通过螺栓固定,所述第二限位套通过螺栓固定在所述贴片的一侧。
8、作为本发明再进一步的方案:所述骨架包括骨架本体,所述骨架本体两端的两侧分别设置有第一连接部和第二连接部,两个所述第一连接部之间及两个所述第二连接部之间均相互平行,且相邻一侧的所述第一连接部与所述第二连接部之间相互垂直,两个所述第一连接部的外侧及两个所述第二连接部的外侧均固定有所述骨架挂钩,所述气动肌肉的两端分别挂设在对应一侧的所述转轴挂钩和所述骨架挂钩上。
9、作为本发明再进一步的方案:两个所述第一连接部的一端及两个所述第二连接部的一端分别固定有第一连接环和第二连接环,两个所述第一连接环之间及两个所述第二连接环之间均相互平行,且两个所述第一连接环的孔轴线与两个所述第二连接环的孔轴线相互垂直,两个所述第一连接环与两个所述第二连接环的规格均相同且适配所述转轴挂钩,两个所述第一连接环与两个所述第二连接环分别转动套接在对应一侧的所述转轴挂钩上。
10、作为本发明再进一步的方案:所述万向轴节的四周均开设有安装槽,所述安装槽的形状均与所述转轴挂钩相适配,所述转轴挂钩固定在所述安装槽中,所述安装槽内部的中心处固定有螺母套,四个所述螺钉分别螺纹连接在对应一侧的所述螺母套中。
11、作为本发明再进一步的方案:所述端盖包括盖体,所述盖体一侧的两端均通过支架固定有套环,两个所述套环的形状均与所述转轴挂钩的外形相适配,且两个所述套环分别转动套接在对应一侧的所述转轴挂钩上。
12、作为本发明再进一步的方案:所述骨架挂钩包括底座和固定挂钩,所述固定挂钩与所述底座焊接固定,所述底座与所述第一连接部、所述第二连接部之间均通过螺栓固定。
13、相较于现有技术,本发明的有益效果如下:
14、1、本发明中,当向硅胶气囊中充气时,气囊膨胀挤压锁紧片,使锁紧片的一端向外扩张并抵住骨架上的第一连接环(或第二连接环)的内壁,产生摩擦力,硅胶气囊充气越多,摩擦力越大,骨架与转轴挂钩之间锁的越紧,从而可以改变骨架与转轴挂钩连接处的刚度,进而改变骨架的刚度;
15、2、本发明中,当给硅胶气囊充气时,在前后两个限位套的限位作用下,使硅胶气囊只能沿自身的圆周方向膨胀,气囊的膨胀是规则的,从而能够更好的挤压转轴挂钩上的锁紧片,锁紧效果更好;
16、3、本发明中,当向硅胶气囊中充气时,气囊膨胀挤压两侧的弧形夹板,在导向槽与导块的配合使用下,锁紧片均匀的向外扩张,使锁紧片能够更好的抵住连接环(包括第一连接环和第二连接环)或套环的内壁,摩擦力更大,锁紧制动更快,当给硅胶气囊放气时,锁紧片会失去支撑力,并在连接环或套环内壁的挤压下沿着导向槽回落到通槽中,通过导向槽和导块的配合使用可以使锁紧片的两端同时均匀的向外扩张,避免锁紧片仅一头翘起而导致的摩擦力不足的问题。
技术特征:
1.一种基于气压驱动的变刚度软体机器人骨架,包括两个相对设置的端盖(1)、对应设置在两个端盖(1)一侧的万向轴节(2)以及设置在两个万向轴节(2)之间的骨架(4),两个所述万向轴节(2)的四周均设置有转轴挂钩(3),所述骨架(4)两端的两侧均固定有骨架挂钩(5),所述骨架(4)的四周均设置有气动肌肉(6),其特征在于,所述万向轴节(2)的四周均设置有螺钉(7),四个所述螺钉(7)的一端均固定有贴片(9),四个所述贴片(9)的一侧均贴合放置有硅胶气囊(8);
2.根据权利要求1所述的基于气压驱动的变刚度软体机器人骨架,其特征在于,所述转轴(32)内壁对应两个所述锁紧片(33)的一侧均设置有开口,两个所述锁紧片(33)的一端均固定在开口内,且另一端均活动连接在开口内。
3.根据权利要求1所述的基于气压驱动的变刚度软体机器人骨架,其特征在于,所述转轴(32)内壁对应两个所述锁紧片(33)的一侧均开设有通槽(35),所述通槽(35)内部的两侧均开设有导向槽(36),所述锁紧片(33)对应所述导向槽(36)的一侧均固定有导块(37),所述导块(37)滑动连接在所述导向槽(36)中,所述锁紧片(33)的内侧通过支架固定有弧形夹板(38),所述弧形夹板(38)的形状与所述硅胶气囊(8)的外形相适配且所述弧形夹板(38)贴合设置在所述硅胶气囊(8)的外侧,所述弧形夹板(38)的内侧设置有软垫(39)。
4.根据权利要求2或3所述的基于气压驱动的变刚度软体机器人骨架,其特征在于,所述硅胶气囊(8)的两端分别套设有第一限位套(81)和第二限位套(82),所述转轴(32)的内部设置有空腔,所述第一限位套(81)塞入所述转轴(32)内部的空腔中且与所述转轴(32)之间通过螺栓固定,所述第二限位套(82)通过螺栓固定在所述贴片(9)的一侧。
5.根据权利要求4所述的基于气压驱动的变刚度软体机器人骨架,其特征在于,所述骨架(4)包括骨架本体(41),所述骨架本体(41)两端的两侧分别设置有第一连接部(42)和第二连接部(44),两个所述第一连接部(42)之间及两个所述第二连接部(44)之间均相互平行,且相邻一侧的所述第一连接部(42)与所述第二连接部(44)之间相互垂直,两个所述第一连接部(42)的外侧及两个所述第二连接部(44)的外侧均固定有所述骨架挂钩(5),所述气动肌肉(6)的两端分别挂设在对应一侧的所述转轴挂钩(3)和所述骨架挂钩(5)上。
6.根据权利要求5所述的基于气压驱动的变刚度软体机器人骨架,其特征在于,两个所述第一连接部(42)的一端及两个所述第二连接部(44)的一端分别固定有第一连接环(43)和第二连接环(45),两个所述第一连接环(43)之间及两个所述第二连接环(45)之间均相互平行,且两个所述第一连接环(43)的孔轴线与两个所述第二连接环(45)的孔轴线相互垂直,两个所述第一连接环(43)与两个所述第二连接环(45)的规格均相同且适配所述转轴挂钩(3),两个所述第一连接环(43)与两个所述第二连接环(45)分别转动套接在对应一侧的所述转轴挂钩(3)上。
7.根据权利要求6所述的基于气压驱动的变刚度软体机器人骨架,其特征在于,所述万向轴节(2)的四周均开设有安装槽(21),所述安装槽(21)的形状均与所述转轴挂钩(3)相适配,所述转轴挂钩(3)固定在所述安装槽(21)中,所述安装槽(21)内部的中心处固定有螺母套(22),四个所述螺钉(7)分别螺纹连接在对应一侧的所述螺母套(22)中。
8.根据权利要求7所述的基于气压驱动的变刚度软体机器人骨架,其特征在于,所述端盖(1)包括盖体(11),所述盖体(11)一侧的两端均通过支架(13)固定有套环(12),两个所述套环(12)的形状均与所述转轴挂钩(3)的外形相适配,且两个所述套环(12)分别转动套接在对应一侧的所述转轴挂钩(3)上。
9.根据权利要求8所述的基于气压驱动的变刚度软体机器人骨架,其特征在于,所述骨架挂钩(5)包括底座(51)和固定挂钩(52),所述固定挂钩(52)与所述底座(51)焊接固定,所述底座(51)与所述第一连接部(42)、所述第二连接部(44)之间均通过螺栓固定。
技术总结
本发明涉及机器人技术领域,公开了一种基于气压驱动的变刚度软体机器人骨架,该装置包括两个相对设置的端盖、对应设置在两个端盖一侧的万向轴节以及设置在两个万向轴节之间的骨架,两个万向轴节的四周均设置有转轴挂钩,骨架两端的两侧均固定有骨架挂钩,骨架的四周均设置有气动肌肉。本发明通过向硅胶气囊中充气,气囊膨胀挤压锁紧片,使锁紧片的一端向外扩张并抵住骨架上的第一连接环(或第二连接环)的内壁,产生摩擦力,硅胶气囊充气越多,摩擦力越大,骨架与转轴挂钩之间锁的越紧,从而可以改变骨架与转轴挂钩连接处的刚度,进而改变骨架的刚度。
技术研发人员:王文彪
受保护的技术使用者:苏州柔臂智能科技有限公司
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!