一种晶圆机械手位置自适应校准方法及系统与流程
本发明涉及搬运机械手,更具体地说,本发明涉及一种晶圆机械手位置自适应校准方法及系统。
背景技术:
1、晶圆搬运机械手在执行任务时,需要准确地控制其位置,以确保晶圆的正确放置和搬运;然而,环境干扰等因素,机械手的位置会产生误差;这些误差导致晶圆搬运的精度下降,甚至出现错误操作,对晶圆质量和生产效率都会产生负面影响;
2、现有授权公告号为cn113305831b的中国专利公开了一种空间机械臂自适应协调控制的位置观测器设计方法及系统,包括:建立空间机械臂的扩展运动学模型;确定航天器参考角速度,设计任务空间位置观测器;确定机械臂关节参考速度;确定空间机械臂自适应动力学协调控制律和参数更新律;采用得到的自适应动力学协调控制律和参数更新律,实现航天器姿态调节和末端执行器对任务空间中期望轨迹的跟踪。该发明基于任务空间位置观测器设计了空间机械臂自适应动力学协调控制器,能够在空间机械臂系统参数存在不确定性的情况下,仅仅通过控制机械臂的运动就可以同时达到机械臂末端轨迹跟踪与基座航天器姿态调节的目的。
3、现有技术检测到机械臂位置存在偏移时,进行驱动电机补偿,但忽略了在机械臂进行补偿过程中,机械臂可能产生新的位置偏移,导致机械臂位置存在位置误差,存在补偿不精准问题。
4、鉴于此,本发明提出一种晶圆机械手位置自适应校准方法及系统以解决上述问题。
技术实现思路
1、为了克服现有技术的上述缺陷,为实现上述目的,本发明提供如下技术方案:一种晶圆机械手位置自适应校准方法,包括:
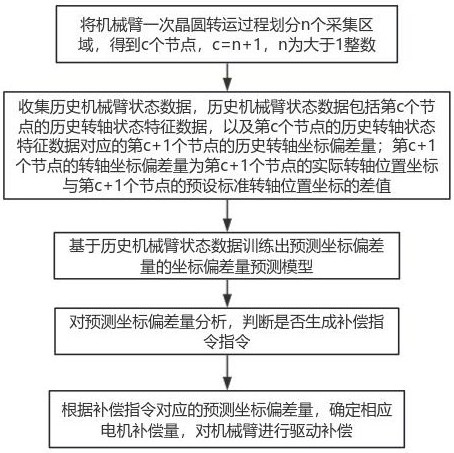
2、将机械臂一次晶圆转运过程划分n个采集区域,得到c个节点,c=n+1,n为大于1整数;
3、收集历史机械臂状态数据,历史机械臂状态数据包括第c个节点的历史转轴状态特征数据,以及第c个节点的历史转轴状态特征数据对应的第c+1个节点的历史转轴坐标偏差量;第c+1个节点的转轴坐标偏差量为第c+1个节点的实际转轴位置坐标与第c+1个节点的预设标准转轴位置坐标的差值;
4、基于历史机械臂状态数据训练出预测坐标偏差量的坐标偏差量预测模型;
5、对预测坐标偏差量分析,判断是否生成补偿指令;
6、根据补偿指令对应的预测坐标偏差量,确定相应电机补偿量,对机械臂进行驱动补偿。
7、进一步地,所述历史转轴状态特征数据包括每个节点的移动速度、移动加速度、晶圆重量、环境温度、转轴升温速率、转轴振动、第c节点的实际位置坐标、第c节点的标准位置坐标、第c+1节点的标准位置坐标与皮带轮磨损程度。
8、进一步地,所述移动速度为机械臂执行末端转运速度;
9、所述转轴升温速率为当前采集区域检测段结束节点温度减去开始节点温度之差除以开始节点至结束节点的时间间隔。
10、进一步地,所述皮带轮磨损程度为主动齿轮与机械臂执行末端齿轮传动偏差,所述主动齿轮与机械臂执行末端齿轮传动偏差的计算方法包括:
11、步骤101、获取主动齿轮与机械臂执行末端齿轮的标准传动比例;
12、步骤102、获取主动齿轮实际转动圈数,根据标准传动比例,得到机械臂执行末端齿轮标准转动圈数,获取机械臂执行末端齿轮实际转动圈数;
13、步骤103、将标准转动圈数减去实际转动圈数得到主动齿轮与机械臂执行末端齿轮传动偏差,考虑到皮带轮实际磨损程度难以获取,因此发明人,想到用机械臂执行末端齿轮传动偏差来表征皮带轮磨损程度。
14、进一步地,所述偏差量预测模型包括x轴坐标偏差量预测模型、y轴坐标偏差量预测模型与z轴坐标偏差量预测模型;x轴坐标偏差量预测模型、y轴坐标偏差量预测模型与z轴坐标偏差量预测模型的输入数据均为第c个节点的历史转轴状态特征数据;x轴坐标偏差量预测模型输出为x轴预测偏差量,轴坐标偏差量预测模型输出为y轴预测偏差量,z轴坐标偏差量预测模型输出为z轴预测偏差量;
15、所述x轴坐标偏差量预测模型具体训练方式包括:
16、将第c个节点的历史转轴状态特征数据作为x轴坐标偏差量预测模型的输入,所述x轴坐标偏差量预测模型以每组第c个节点的历史转轴状态特征数据预测的第c+1个节点的x轴预测偏差量作为输出,以该组第c个节点的历史转轴状态特征数据对应的实际第c+1个节点的x轴偏差量为预测目标,以最小化所有第c个节点的历史转轴状态特征数据的预测误差之和作为训练目标;其中,预测误差的计算公式为,其中为预测误差,i为历史转轴状态特征数据的编号,为第组历史转轴状态特征数据对应的预测x轴预测偏差量,为第组历史转轴状态特征数据对应实际x轴偏差量;对x轴坐标偏差量预测模型进行训练,直至预测误差之和达到收敛时停止训练;
17、所述x轴坐标偏差量预测模型、y轴坐标偏差量预测模型与z轴坐标偏差量预测模型,训练方法一致,且均为深度信念网络模型、循环神经网络、卷积神经网络中的一种。
18、进一步地,所述补偿指令包括x轴补偿指令、y轴补偿指令或z轴补偿指令。
19、进一步地,所述x轴补偿指令、y轴补偿指令或z轴补偿指令的生成方法包括:
20、获取第c+1节点的x轴偏差允许误差、y轴偏差允许误差与z轴偏差允许误差;
21、将x轴预测偏差量绝对值与x轴偏差允许误差比对分析,若x轴预测偏差量绝对值在x轴偏差允许误差范围内,则不生成x轴补偿指令;若x轴预测偏差量绝对值不在x轴偏差允许误差范围内,则生成x轴补偿指令;
22、将y轴预测偏差量绝对值与y轴偏差允许误差比对分析,若y轴预测偏差量绝对值在y轴偏差允许误差范围内,则不生成y轴补偿指令;若y轴预测偏差量绝对值不在y轴偏差允许误差范围内,则生成y轴补偿指令;
23、将z轴预测偏差量绝对值与z轴偏差允许误差比对分析,若z轴预测偏差量绝对值在z轴偏差允许误差范围内,则不生成z轴补偿指令;若z轴预测偏差量绝对值不在z轴偏差允许误差范围内,则生成z轴补偿指令。
24、进一步地,所述确定相应电机补偿量,对机械臂进行驱动补偿的方法包括:
25、若生成x轴补偿指令,则获取生成x轴补偿指令对应的x轴预测偏差量,判断x轴预测偏差量与0的关系,确定x轴驱动电机的转动方向,控制x轴驱动电机根据确定的转动方向旋转至与x轴预测偏差量绝对值对应的旋转圈数,同理补偿y轴预测偏差量与z轴预测偏差量。
26、一种晶圆机械手位置自适应校准系统,实施所述的一种晶圆机械手位置自适应校准方法,包括:
27、区域划分模块,用于将机械臂一次晶圆转运过程划分n个采集区域,得到c个节点,c=n+1,n为大于1整数;
28、数据收集模块,用于收集历史机械臂状态数据,历史机械臂状态数据包括第c个节点的历史转轴状态特征数据,以及第c个节点的历史转轴状态特征数据对应的第c+1个节点的历史转轴坐标偏差量;第c+1个节点的转轴坐标偏差量为第c+1个节点的实际转轴位置坐标与第c+1个节点的预设标准转轴位置坐标的差值;
29、坐标偏差量预测模块,基于历史机械臂状态数据训练出预测坐标偏差量的坐标偏差量预测模型;
30、补偿分析模块,用于对预测坐标偏差量分析,判断是否生成补偿指令;
31、补偿执行模块,用于接收补偿指令,根据补偿指令对应的预测坐标偏差量,确定相应电机补偿量,对机械臂进行驱动补偿。
32、一种电子设备,包括存储器、处理器以及存储在存储器上并在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现所述的一种晶圆机械手位置自适应校准方法。
33、一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被执行时实现所述的一种晶圆机械手位置自适应校准方法。
34、本发明一种的技术效果和优点:
35、通过收集历史机械臂状态数据,预测到达下一个节点过程中将产生的转轴坐标偏差量,将已产生的转轴偏差量和预测到达下一个节点过程中产生的转轴坐标偏差量,一起进行补偿,避免了补偿过程中产生新的位置偏移,确保机械手在执行任务时能够准确地控制位置;可以有效提高晶圆搬运的精度和可靠性,减少晶圆的损坏和浪费。
- 还没有人留言评论。精彩留言会获得点赞!