一种基于机械手臂的货物运输方法及系统与流程
本申请涉及货物运输,具体而言,涉及一种基于机械手臂的货物运输方法及系统。
背景技术:
1、近年来,随着机器人技术和人工智能技术的加速发展,机器人和智能装置也加速应用在各行各业。例如,使用机器人来运输货物。虽然利用机器人来运输货物极大程度的降低了人力成本以及节约了货物运输时间。
2、然而,在利用机器人进行货物运输的过程中,机器人很容易因为地面不干净(如颗粒垃圾)或者是运输的货物自身的运输惯性导致货物出现颠簸,进而导致货物掉落或破损,给企业带来损失。
3、因此,如何解决上述问题是目前亟需解决的问题。
技术实现思路
1、本申请提供一种基于机械手臂的货物运输方法及系统,旨在改善上述问题。
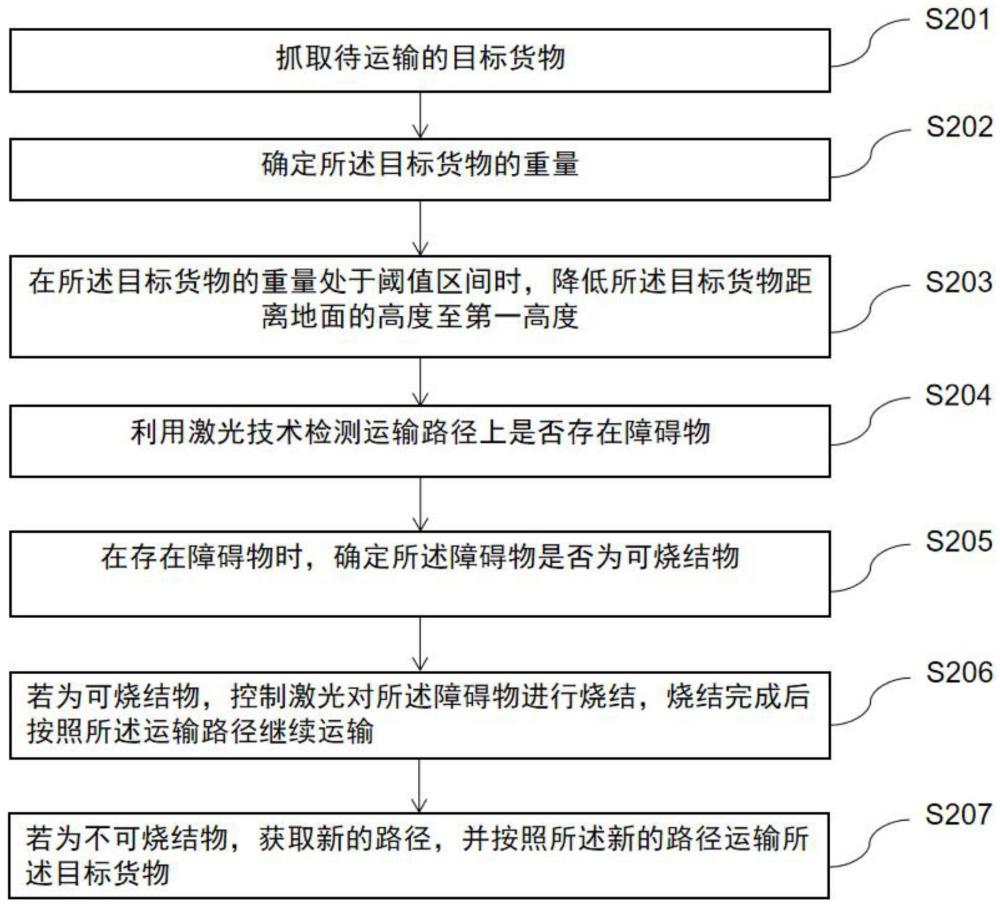
2、第一方面,本申请提供的一种基于机械手臂的货物运输方法,该基于机械手臂的货物运输方法,包括:抓取待运输的目标货物;
3、确定所述目标货物的重量;
4、在所述目标货物的重量处于阈值区间时,降低所述目标货物距离地面的高度至第一高度;
5、利用激光技术检测运输路径上是否存在障碍物;
6、在存在障碍物时,确定所述障碍物是否为可烧结物;
7、若为可烧结物,控制激光对所述障碍物进行烧结,烧结完成后按照所述运输路径继续运输;
8、若为不可烧结物,获取新的路径,并按照所述新的路径运输所述目标货物。
9、在一可能的实施例中,在抓取待运输的目标货物之前,所述方法还包括:
10、确定目标货物的运输类型,所述运输类型包括直接运输和防撞运输;
11、在所述运输类型为所述防撞运输时,控制所述机械手臂暴露出防撞面,所述防撞面用于降低所述目标货物与所述机械手臂之间的碰撞力。
12、在一可能的实施例中,所述利用激光技术检测运输路径上是否存在障碍物,包括:
13、在运输过程中,控制所述机械手臂背离所述目标货物的一面发射出多束垂直于地面的激光,所述激光用于检测运输路径上是否存在障碍物。
14、在一可能的实施例中,在所述控制激光对所述障碍物进行烧结,烧结完成后按照所述运输路径继续运输之后,所述方法还包括:
15、检测行驶在所述可烧结物烧结后的所述运输路径上的颠簸系数;
16、在所述颠簸系数大于阈值时,降低所述目标货物距离地面的高度至第二高度,所述第二高度小于所述第一高度。
17、在一可能的实施例中,在所述控制激光对所述障碍物进行烧结,烧结完成后按照所述运输路径继续运输之后,所述方法还包括:
18、检测行驶在所述可烧结物烧结后的所述运输路径上的颠簸系数;
19、在所述颠簸系数大于阈值时,控制所述机械手臂暴露出减震面,所述减震面与所述目标货物的底部接触。
20、在一可能的实施例中,所述减震面的高度为2厘米。
21、在一可能的实施例中,所述减震面采用弹性材料制成。
22、第二方面,本申请还提供一种基于机械手臂的货物运输系统,所述系统包括:
23、抓取单元,用于抓取待运输的目标货物;
24、称重单元,用于确定所述目标货物的重量;
25、升降单元,用于在所述目标货物的重量处于阈值区间时,降低所述目标货物距离地面的高度至第一高度;
26、障碍物检测单元,用于利用激光技术检测运输路径上是否存在障碍物;
27、障碍物识别单元,用于在存在障碍物时,确定所述障碍物是否为可烧结物;
28、第一障碍物处理单元,用于若为可烧结物,控制激光对所述障碍物进行烧结,烧结完成后按照所述运输路径继续运输;
29、第二障碍物处理单元,用于若为不可烧结物,获取新的路径,并按照所述新的路径运输所述目标货物。
30、在一可能的实施例中,所述系统还包括:
31、运输类型确定单元,用于在抓取待运输的目标货物之前,确定目标货物的运输类型,所述运输类型包括直接运输和防撞运输;在所述运输类型为所述防撞运输时,控制所述机械手臂暴露出防撞面,所述防撞面用于降低所述目标货物与所述机械手臂之间的碰撞力。
32、在一可能的实施例中,所述系统还包括:
33、行驶单元,用于在所述控制激光对所述障碍物进行烧结,烧结完成后按照所述运输路径继续运输之后,检测行驶在所述可烧结物烧结后的所述运输路径上的颠簸系数;在所述颠簸系数大于阈值时,降低所述目标货物距离地面的高度至第二高度,所述第二高度小于所述第一高度。
34、有益效果:
35、上述本申请提供的一种基于机械手臂的货物运输方法及系统,本申请通过抓取待运输的目标货物;确定所述目标货物的重量;在所述目标货物的重量处于阈值区间时,降低所述目标货物距离地面的高度至第一高度;利用激光技术检测运输路径上是否存在障碍物;在存在障碍物时,确定所述障碍物是否为可烧结物;若为可烧结物,控制激光对所述障碍物进行烧结,烧结完成后按照所述运输路径继续运输;若为不可烧结物,获取新的路径,并按照所述新的路径运输所述目标货物,从而实现利用机械手臂来进行货物的平稳快速运输,使得无需考虑地面是否干净,可快速行驶,提高货物运输的效率。
技术特征:
1.一种基于机械手臂的货物运输方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,在抓取待运输的目标货物之前,所述方法还包括:
3.根据权利要求1所述的方法,其特征在于,所述利用激光技术检测运输路径上是否存在障碍物,包括:
4.根据权利要求1所述的方法,其特征在于,在所述控制激光对所述障碍物进行烧结,烧结完成后按照所述运输路径继续运输之后,所述方法还包括:
5.根据权利要求1所述的方法,其特征在于,在所述控制激光对所述障碍物进行烧结,烧结完成后按照所述运输路径继续运输之后,所述方法还包括:
6.根据权利要求5所述的方法,其特征在于,所述减震面的高度为2厘米。
7.根据权利要求6所述的方法,其特征在于,所述减震面采用弹性材料制成。
8.一种基于机械手臂的货物运输系统,其特征在于,所述系统包括:
9.根据权利要求8所述的系统,其特征在于,所述系统还包括:
10.根据权利要求8所述的系统,其特征在于,所述系统还包括:
技术总结
本发明提供一种基于机械手臂的货物运输方法及系统,该基于机械手臂的货物运输方法,包括:抓取待运输的目标货物;确定所述目标货物的重量;在所述目标货物的重量处于阈值区间时,降低所述目标货物距离地面的高度至第一高度;利用激光技术检测运输路径上是否存在障碍物;在存在障碍物时,确定所述障碍物是否为可烧结物;若为可烧结物,控制激光对所述障碍物进行烧结,烧结完成后按照所述运输路径继续运输;若为不可烧结物,获取新的路径,并按照所述新的路径运输所述目标货物。本申请可以实现利用机械手臂来进行货物的平稳快速运输,使得无需考虑地面是否干净,可快速行驶,提高货物运输的效率。
技术研发人员:车忠伟,李嵩松
受保护的技术使用者:威海联科智能装备有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!