机器人机械臂的路径规划方法、装置、设备及存储介质与流程
本发明涉及机器人机械臂,尤其涉及一种机器人机械臂的路径规划方法、装置、设备及存储介质。
背景技术:
1、在工业智能化快速发展的背景下,以机器人为代表的智能设备在产品生产过程中自动化应用愈加广泛,机械臂的工作环境越来越复杂,对机械臂的工作任务提出了越来越高的要求,而传统的机械臂急停控制方法比较笨重,且容易对机械臂造成破坏与影响,导致机械臂的使用寿命衰减以及作业精度的下降,因此,如何实现对机器人机械臂进行任务状态下的路径精准规划成为目前亟待解决的问题。
技术实现思路
1、本发明提供了一种机器人机械臂的路径规划方法、装置、设备及存储介质,以提高机器人机械臂的路径规划精准度。
2、根据本发明的一方面,提供了一种机器人机械臂的路径规划方法,所述方法包括:
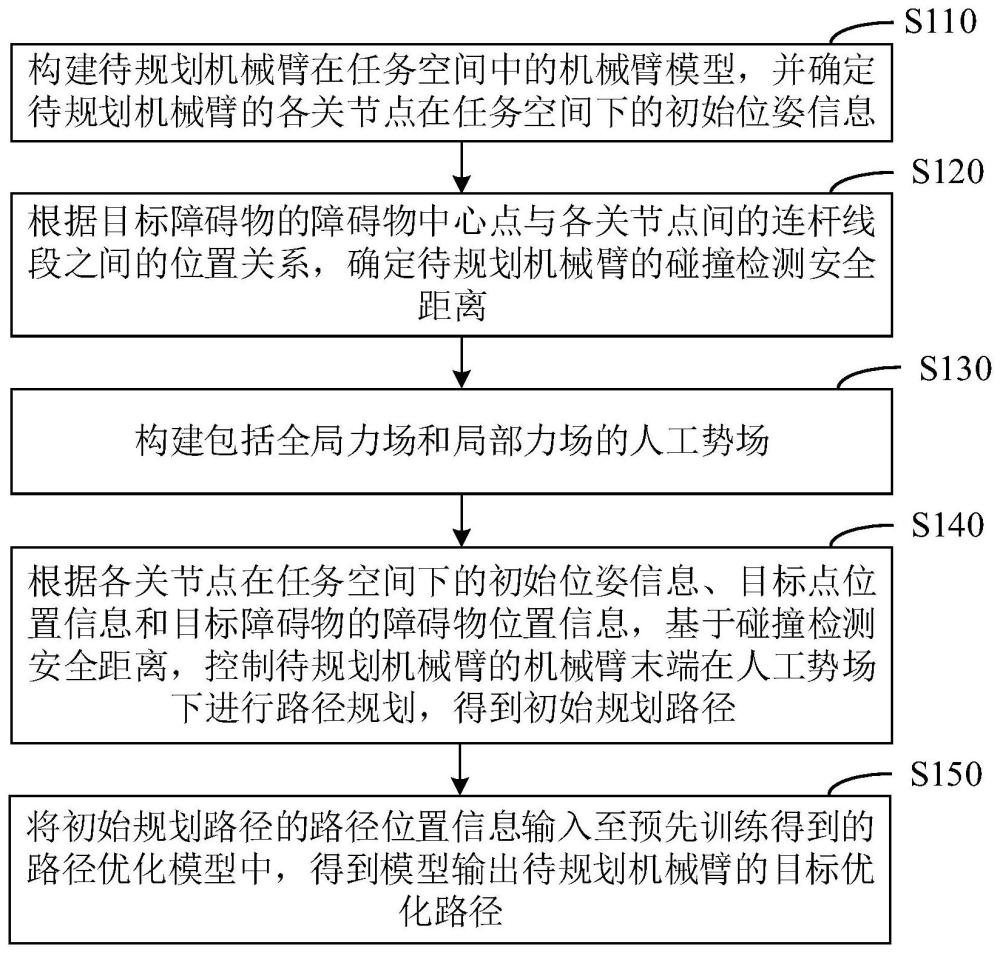
3、构建待规划机械臂在任务空间中的机械臂模型,并确定所述待规划机械臂的各关节点在所述任务空间下的初始位姿信息;
4、根据目标障碍物的障碍物中心点与各关节点间的连杆线段之间的位置关系,确定所述待规划机械臂的碰撞检测安全距离;
5、构建包括全局力场和局部力场的人工势场;
6、根据各关节点在所述任务空间下的初始位姿信息、目标点位置信息和所述目标障碍物的障碍物位置信息,基于所述碰撞检测安全距离,控制所述待规划机械臂的机械臂末端在所述人工势场下进行路径规划,得到初始规划路径;
7、将所述初始规划路径的路径位置信息输入至预先训练得到的路径优化模型中,得到模型输出所述待规划机械臂的目标优化路径。
8、根据本发明的另一方面,提供了一种机器人机械臂的路径规划装置,所述装置包括:
9、模型构建模块,用于构建待规划机械臂在任务空间中的机械臂模型,并确定所述待规划机械臂的各关节点在所述任务空间下的初始位姿信息;
10、安全距离确定模块,用于根据目标障碍物的障碍物中心点与各关节点间的连杆线段之间的位置关系,确定所述待规划机械臂的碰撞检测安全距离;
11、人工势场构建模块,用于构建包括全局力场和局部力场的人工势场;
12、初始路径规划模块,用于根据各关节点在所述任务空间下的初始位姿信息、目标点位置信息和所述目标障碍物的障碍物位置信息,基于所述碰撞检测安全距离,控制所述待规划机械臂的机械臂末端在所述人工势场下进行路径规划,得到初始规划路径;
13、路径优化模块,用于将所述初始规划路径的路径位置信息输入至预先训练得到的路径优化模型中,得到模型输出所述待规划机械臂的目标优化路径。
14、根据本发明的另一方面,提供了一种电子设备,所述电子设备包括:
15、至少一个处理器;以及
16、与所述至少一个处理器通信连接的存储器;其中,
17、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明任一实施例所述的机器人机械臂的路径规划方法。
18、根据本发明的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明任一实施例所述的机器人机械臂的路径规划方法。
19、本发明实施例通过构建待规划机械臂在任务空间中的机械臂模型,并确定待规划机械臂各关节点在任务空间下的初始位姿信息;根据目标障碍物的障碍物中心点与各关节点间的连杆线段之间位置关系,确定待规划机械臂的碰撞检测安全距离;构建包括全局力场和局部力场的人工势场;根据各关节点在任务空间下的初始位姿信息、目标点位置信息和目标障碍物的障碍物位置信息,基于碰撞检测安全距离,控制待规划机械臂的机械臂末端在人工势场下进行路径规划,得到初始规划路径;将初始规划路径的路径位置信息输入至预先训练得到的路径优化模型中,得到模型输出待规划机械臂的目标优化路径。上述技术方案基于改进人工势场法的路径规划方法的实现有利于提高机械臂在复杂工作环境下的工作速度与准确度,能够高效、可靠地进行机械臂路径规划,降低机械臂的使用寿命损耗,提高作业精度,通过预先训练的用于进行路径优化的模型对基于人工势场得到的初始规划路径进行进一步的路径优化,进一步提高了对路径规划的精准度。
20、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种机器人机械臂的路径规划方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述根据目标障碍物的障碍物中心点与各关节点间的连杆线段之间的位置关系,确定所述待规划机械臂的碰撞检测安全距离,包括:
3.根据权利要求2所述的方法,其特征在于,所述根据所述第一位置距离、第二位置距离和第三位置距离,确定碰撞检测安全距离,包括:
4.根据权利要求1所述的方法,其特征在于,所述构建包括全局力场和局部力场的人工势场,包括:
5.根据权利要求1所述的方法,其特征在于,所述路径优化模型的模型训练方式如下:
6.根据权利要求5所述的方法,其特征在于,所述根据所述参考规划路径,确定目标损失值,包括:
7.一种机器人机械臂的路径规划装置,其特征在于,包括:
8.根据权利要求7所述的装置,其特征在于,所述安全距离确定模块,包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-6中任一项所述的机器人机械臂的路径规划方法。
技术总结
本发明公开了一种机器人机械臂的路径规划方法、装置、设备及存储介质。该方法包括:构建待规划机械臂在任务空间中的机械臂模型,并确定待规划机械臂各关节点在任务空间下的初始位姿信息;根据目标障碍物的障碍物中心点与各关节点间的连杆线段之间位置关系,确定待规划机械臂的碰撞检测安全距离;构建包括全局力场和局部力场的人工势场;根据各关节点在任务空间下的初始位姿信息、目标点位置信息和目标障碍物的障碍物位置信息,基于碰撞检测安全距离,控制待规划机械臂的机械臂末端在人工势场下进行路径规划,得到初始规划路径;将初始规划路径的路径位置信息输入至预先训练得到的路径优化模型中,得到模型输出待规划机械臂的目标优化路径。
技术研发人员:施理成,刘焕辉,张焕燊,孙瑞,卢先锋,纪经涛,陈晓鹏,蔡素雄,陈国雄,潘俊龙,朱晓峰,郭伟逢,陈志浩,吴晨静,龚演平,黄志
受保护的技术使用者:广东电网有限责任公司
技术研发日:
技术公布日:2024/4/22
- 还没有人留言评论。精彩留言会获得点赞!