一种基于视觉检测的机器人去毛刺装置
本发明涉及工业零件去毛刺,具体为一种基于视觉检测的机器人去毛刺装置。
背景技术:
1、视觉检测装置主要利用的是视觉检测技术是精密测试技术领域内最具有发展潜力的新技术,具有非接触、速度快、柔性好等突出优点,在现代制造业中有着重要的应用前景。随着目前生产金属零件时对产品的质量记录及可追溯性需求越来越多,机器视觉检测已经成为生产过程中的关键技术之一。金属零件在机械加工过程中会产生毛刺,这些毛刺的存在不仅影响零件的外观,还会影响到后续使用、装配、性能和使用寿命,因而零件的去毛刺工作非常重要。利用视觉检测的机器人去毛刺可以确保高效性和精准性,能够提高生产效率,降低成本,改善产品质量。
2、现有技术中,在进行视觉检测时由于摄像机的位置固定,使难以调节摄像机的角度和位置,难以提高检测的精度和准确性,另外现有技术中,难以对刀头的位置进行调节,即难以对不同的金属零件调节刀头的角度,会降低对金属零件的去毛刺效果,因此,需要提出一种基于视觉检测的机器人去毛刺装置。
技术实现思路
1、本发明的目的是为了现有技术中,在进行视觉检测时由于摄像机的位置固定,使难以调节摄像机的角度和位置,难以提高检测的精度和准确性,另外现有技术中,难以对刀头的位置进行调节,即难以对不同的金属零件调节刀头的角度,会降低对金属零件的去毛刺效果的问题,而提出的一种基于视觉检测的机器人去毛刺装置。
2、为了实现上述目的,本发明采用了如下技术方案:
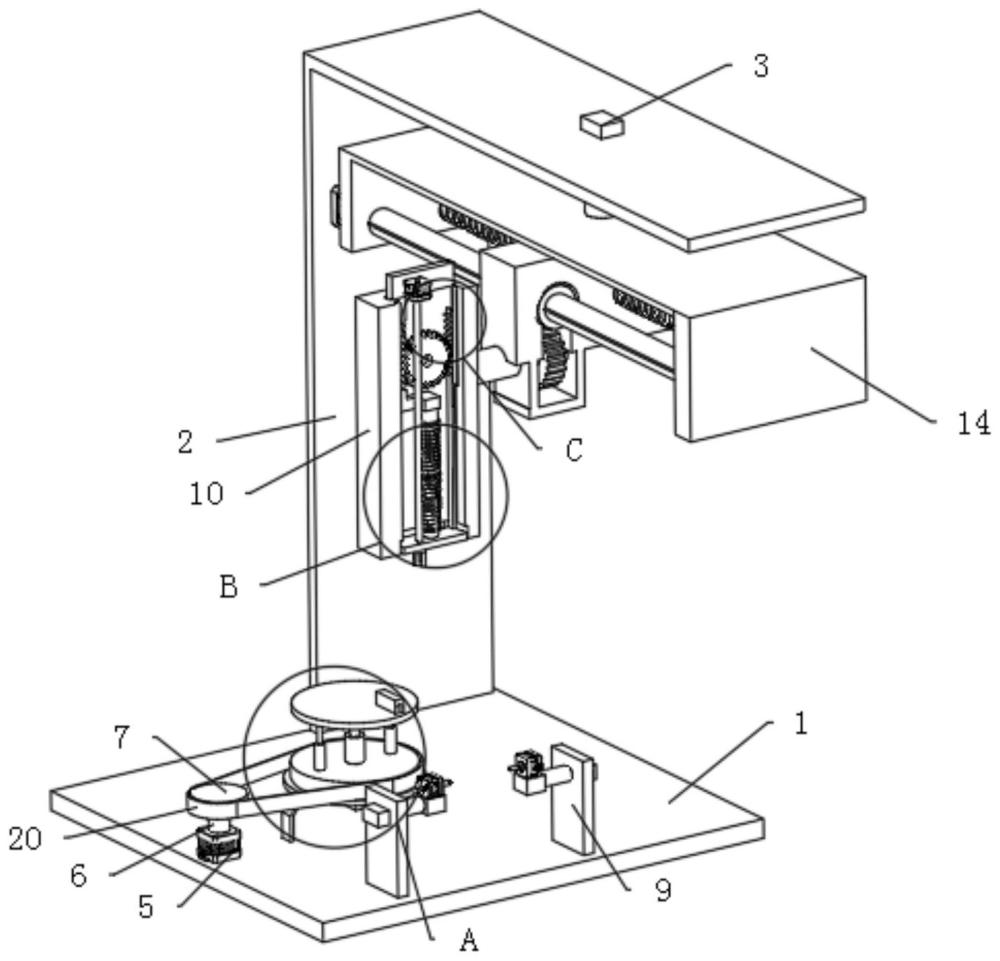
3、一种基于视觉检测的机器人去毛刺装置,包括工作台,所述工作台的外部设有视觉检测机构,所述视觉检测机构包括设置在工作台外部的第一电机,所述第一电机的输出端设置有第一转动轴,所述第一转动轴的外部固定连接有第一转动轮,所述第一转动轮的外部传动连接有皮带,所述皮带的外部传动连接有第二转动轮,所述第二转动轮的外部转动连接有支撑块,所述支撑块与工作台之间为固定连接,所述支撑块的外部固定安装有第三气缸,所述第三气缸的输出端设置有第二伸缩杆,所述第二伸缩杆远离第二转动轮的一侧固定连接有固定盘,所述固定盘的外部设置有ccd摄像机;
4、所述工作台的外部固定连接有第一连接板,所述第一连接板的外部固定安装有第一气缸,所述第一气缸的输出端设置有机器人调节机构;
5、其中,所述支撑块对第二转动轮起到支撑作用且不影响第二转动轮发生转动,ccd摄像机便于全方位获取工件表面的图像,并通过计算机对其进行分析和处理。
6、上述技术方案进一步包括:
7、所述机器人调节机构包括设置在第一气缸输出端的第三伸缩杆,所述第三伸缩杆的外部固定连接有第四连接板,所述第四连接板的外部固定安装有第二电机,所述第二电机的输出端设置有螺纹杆,所述螺纹杆的外部螺纹连接有第二滑块,所述第四连接板的外部固定安装有第三电机,所述第三电机的输出端设置有第四转动轴,所述第四转动轴的外部固定连接有第二固定块,所述第四转动轴的外部滑动连接有涡轮,所述涡轮的外部啮合连接有第二齿轮,所述第二齿轮的外部固定连接有第五转动轴,所述第五转动轴的外部固定连接有第三连接板;
8、其中,所述机器人调节机构可以调节第三连接板的位置,便于控制刀头在工件表面的移动,实现精确的去毛刺操作。
9、所述工作台的外部固定连接有第二连接板,所述第二连接板的外部固定安装有第二气缸,所述第二气缸的输出端设置有第一伸缩杆;
10、其中,所述第二连接板、第二气缸和第一伸缩杆为对称设置,便于对金属零件进行夹紧。
11、所述第一伸缩杆的外部固定连接有第一固定块,所述第一固定块的外部固定安装有第四电机,所述第四电机的输出端设置有第二转动轴;
12、其中,所述第一固定块、第四电机、第二转动轴为对称设置,便于对金属零件发生转动。
13、所述第三连接板的外部固定连接有第五连接板,所述第五连接板的外部固定安装有第五电机,所述第五电机的输出端设置有第三转动轴,所述第三转动轴的外部固定连接有刀头;
14、其中,所述第五连接板便于带动刀头发生转动,实现去毛刺操作。
15、所述第三连接板的外部滑动连接有第一滑块,所述第一滑块的外部固定连接有第二齿条,所述第二齿条的外部滑动连接有第六连接板,所述第六连接板与第五连接板之间为固定连接;
16、其中,所述第一滑块便于使刀头与零件的接触力过大时是刀头发生上升。
17、所述第二齿条的外部啮合连接有第一齿轮,所述第一齿轮与第三连接板之间为转动连接,所述第一齿轮的外部啮合连接有第一齿条,所述第一齿条与第五连接板之间为滑动连接;
18、其中,所述第一齿轮便于带动第二齿条和第一齿条同时发生移动。
19、所述第一齿条的外部固定连接有弹簧,所述弹簧与第一滑块之间为固定连接;
20、其中,所述弹簧便于发生弹性形变,防止刀头与零件的接触力过大而崩断。
21、相比现有技术,本发明的有益效果为:
22、1、本发明中,使用时,通过启动第二电机和第三电机,使第二电机和第三电机输出端设置的螺纹杆和第四转动轴发生转动,再通过第二齿轮、第二滑块、涡轮和第五转动轴等零件的配合下,可以改变第三连接板的位置和角度,便于对刀头的位置进行调节,提高对金属零件的去毛刺效果。
23、2、本发明中,使用时,通过启动第一电机,使第一电机输出端设置的第一转动轴发生转动,再通过第一转动轮、第二伸缩杆和第三气缸等零件的配合下,可以改变ccd摄像机的高度和角度,便于全方位获取工件表面的图像,并通过计算机对其进行分析和处理,确定需要去除的毛刺位置和形状,根据视觉检测机构的分析结果,机器人调节控制刀头在工件表面的移动,实现精确的去毛刺操作。
24、3、本发明中,使用时,通过启动第五电机,使第五电机输出端设置的第三转动轴发生转动,再通过第一齿轮、第一齿条、第二齿条和弹簧等零件的配合下,可以使刀头在进行去毛刺操作时防止刀头与零件的接触力过大而崩断,影响工作效率,造成损失。
技术特征:
1.一种基于视觉检测的机器人去毛刺装置,包括工作台(1),其特征在于,所述工作台(1)的外部设有视觉检测机构,所述视觉检测机构包括设置在工作台(1)外部的第一电机(5),所述第一电机(5)的输出端设置有第一转动轴(6),所述第一转动轴(6)的外部固定连接有第一转动轮(7),所述第一转动轮(7)的外部传动连接有皮带(20),所述皮带(20)的外部传动连接有第二转动轮(22),所述第二转动轮(22)的外部转动连接有支撑块(21),所述支撑块(21)与工作台(1)之间为固定连接,所述支撑块(21)的外部固定安装有第三气缸(26),所述第三气缸(26)的输出端设置有第二伸缩杆(23),所述第二伸缩杆(23)远离第二转动轮(22)的一侧固定连接有固定盘(24),所述固定盘(24)的外部设置有ccd摄像机(25);
2.根据权利要求1所述的一种基于视觉检测的机器人去毛刺装置,其特征在于,所述机器人调节机构包括设置在第一气缸(3)输出端的第三伸缩杆(37),所述第三伸缩杆(37)的外部固定连接有第四连接板(14),所述第四连接板(14)的外部固定安装有第二电机(11),所述第二电机(11)的输出端设置有螺纹杆(39),所述螺纹杆(39)的外部螺纹连接有第二滑块(38),所述第四连接板(14)的外部固定安装有第三电机(12),所述第三电机(12)的输出端设置有第四转动轴(40),所述第四转动轴(40)的外部固定连接有第二固定块(41),所述第四转动轴(40)的外部滑动连接有涡轮(42),所述涡轮(42)的外部啮合连接有第二齿轮(43),所述第二齿轮(43)的外部固定连接有第五转动轴(44),所述第五转动轴(44)的外部固定连接有第三连接板(10)。
3.根据权利要求1所述的一种基于视觉检测的机器人去毛刺装置,其特征在于,所述工作台(1)的外部固定连接有第二连接板(9),所述第二连接板(9)的外部固定安装有第二气缸(15),所述第二气缸(15)的输出端设置有第一伸缩杆(16)。
4.根据权利要求3所述的一种基于视觉检测的机器人去毛刺装置,其特征在于,所述第一伸缩杆(16)的外部固定连接有第一固定块(19),所述第一固定块(19)的外部固定安装有第四电机(17),所述第四电机(17)的输出端设置有第二转动轴(18)。
5.根据权利要求2所述的一种基于视觉检测的机器人去毛刺装置,其特征在于,所述第三连接板(10)的外部固定连接有第五连接板(32),所述第五连接板(32)的外部固定安装有第五电机(31),所述第五电机(31)的输出端设置有第三转动轴(29),所述第三转动轴(29)的外部固定连接有刀头(27)。
6.根据权利要求2所述的一种基于视觉检测的机器人去毛刺装置,其特征在于,所述第三连接板(10)的外部滑动连接有第一滑块(28),所述第一滑块(28)的外部固定连接有第二齿条(36),所述第二齿条(36)的外部滑动连接有第六连接板(33),所述第六连接板(33)与第五连接板(32)之间为固定连接。
7.根据权利要求6所述的一种基于视觉检测的机器人去毛刺装置,其特征在于,所述第二齿条(36)的外部啮合连接有第一齿轮(34),所述第一齿轮(34)与第三连接板(10)之间为转动连接,所述第一齿轮(34)的外部啮合连接有第一齿条(35),所述第一齿条(35)与第五连接板(32)之间为滑动接。
8.根据权利要求7所述的一种基于视觉检测的机器人去毛刺装置,其特征在于,所述第一齿条(35)的外部固定连接有弹簧(30),所述弹簧(30)与第一滑块(28)之间为固定连接。
技术总结
本发明涉及工业零件去毛刺技术领域,具体为一种基于视觉检测的机器人去毛刺装置,包括工作台,工作台的外部设有视觉检测机构,视觉检测机构包括设置在工作台外部的第一电机,第一电机的输出端设置有第一转动轴,第一转动轴的外部固定连接有第一转动轮,第一转动轮的外部传动连接有皮带,皮带的外部传动连接有第二转动轮,第二转动轮的外部转动连接有支撑块,通过启动第二电机和第三电机,使第二电机和第三电机输出端设置的螺纹杆和第四转动轴发生转动,再通过第二齿轮、第二滑块、涡轮和第五转动轴等零件的配合下,可以改变第三连接板的位置和角度,便于对刀头的位置进行调节,提高对金属零件的去毛刺效果。
技术研发人员:徐伊岑
受保护的技术使用者:无锡商业职业技术学院
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!