仿生球面机器人
本发明涉及机器人,具体涉及仿生球面机器人。
背景技术:
1、目前现有的仿生球面机器人,其三个转动自由度的转动轴线通常是与运动链上的三个转动副的轴线对应重合。一些仿生机器人的球关节,需要完成较为复杂的球面运动,现有机器人实现该类运动,需要较为复杂的控制。根据特定的仿生球面运动,可对应设计具有变轴线球面运动进行模拟,其控制相对简单。变转动轴线其实际转动轴线与转动副的轴线通常不重合。目前,具有变转动轴线的仿生球面机器人,较为少见。
技术实现思路
1、本发明的目的是提供仿生球面机器人,可以利用变转动轴线运动其高次连杆曲线实现定轴线运动不容易实现的复杂运动,从而模拟仿生机器人一类复杂的球面运动,降低其控制难度。
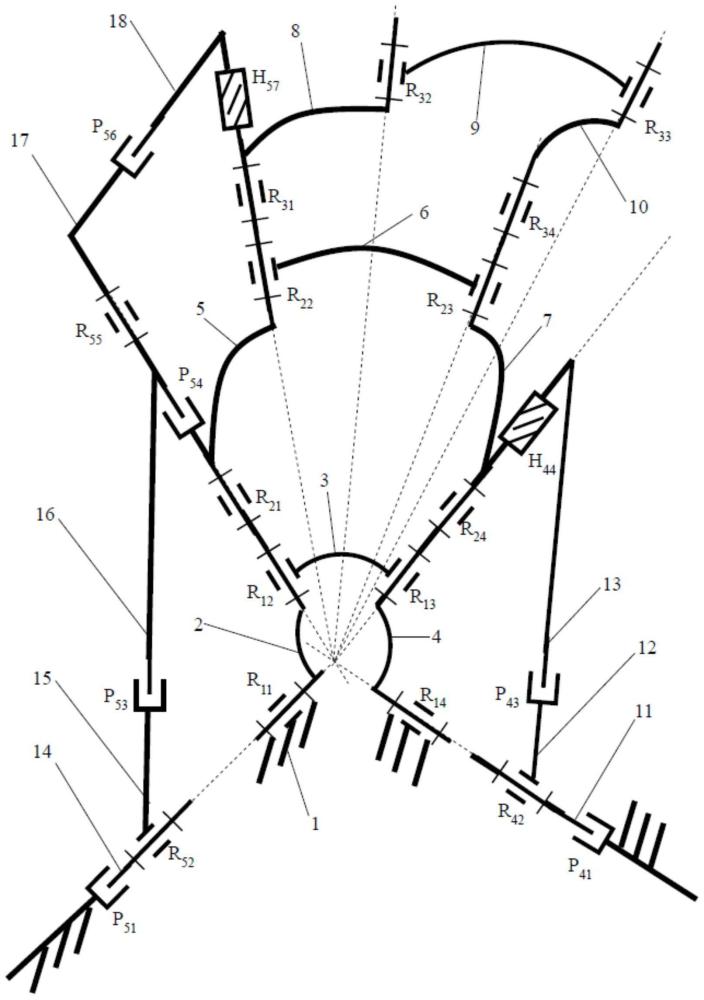
2、本发明所采用的技术方案是,仿生球面机器人,包括有定平台、第一运动支链、第二运动支链、第三运动支链、第四运动支链及第五运动支链;
3、第一运动支链分别与定平台及第二运动支链连接;第二运动支链连接与第三运动支链连接;第四运动支链分别与定平台及第二运动支链连接;第五运动支链与定平台及第三运动支链连接。
4、本发明的特征还在于:
5、第一运动支链包括有依次连接的第十一转动副r11、第二连杆、第十二转动副r12、第三连杆、第十三转动副r13、第四连杆及第十四转动副r14;第二连杆通过第十一转动副r11与定平台连接,第四连杆通过第十四转动副r14与定平台连接;第四连杆与第二运动支链连接。
6、第二运动支链包括有依次连接的第二十一转动副r21、第五连杆、第二十二转动副r22、第六连杆、第二十三转动副r23、第七连杆、第二十四转动副r24;
7、第七连杆通过第二十四转动副r24与第四连杆连接;第七连杆还与第四运动支链连接;第五连杆及第七连杆分别与第三运动支链连接。
8、第三运动支链包括有依次连接的第三十一转动副r31、第八连杆、第三十二转动副r32、第九连杆、第三十三转动副r33、第十连杆、第三十四转动副r34;
9、第八连杆通过第三十一转动副r31与第五连杆连接;
10、第七连杆通过第三十四转动副r34与第十连杆连接。
11、第四运动支链包括有依次连接的第四十一移动副p41、第十一连杆、第四十二转动副r42、第十二连杆、第四十三移动副p43、第十三连杆、第四十四螺旋副h44;
12、第十一连杆通过第四十一移动副p41与定平台连接,第十三连杆通过第四十四螺旋副h44与第七连杆连接。
13、第五运动支链包括有依次连接的第五十一移动副p51、第十四连杆、第五十二转动副r52、第十五连杆、第五十三移动副p53、第十六连杆、第五十四移动副p54、第五十五转动副r55、第十七连杆、第五十六移动副p56、第十八连杆、第五十七螺旋副h57;
14、第十四连杆通过第五十一移动副p51与定平台连接,第十八连杆通过第五十七螺旋副h57与第八连杆连接。
15、第十一转动副r11,设置有转动电机;第四十一移动副p41及第五十一移动副p51分别设置有移动电机。
16、本发明的有益效果是:
17、本发明仿生球面机器人,其输出构件具有三转动运动。其中三个转动轴线是在自身的转动过程中,不断发生改变。变转动轴线运动其连杆对应的连杆曲线的次数较定轴线连杆曲线的次数高,因而可以利用变转动轴线运动其高次连杆曲线实现定轴线运动不容易实现的复杂运动,从而模拟仿生机器人一类复杂的球面运动,降低其控制难度。
技术特征:
1.仿生球面机器人,其特征在于,包括有定平台(1)、第一运动支链、第二运动支链、第三运动支链、第四运动支链及第五运动支链;
2.根据权利要求1所述的仿生球面机器人,其特征在于,所述第一运动支链包括有依次连接的第十一转动副r11、第二连杆(2)、第十二转动副r12、第三连杆(3)、第十三转动副r13、第四连杆(4)及第十四转动副r14;第二连杆(2)通过第十一转动副r11与定平台(1)连接,第四连杆(4)通过第十四转动副r14与定平台(1)连接;第四连杆(4)与第二运动支链连接。
3.根据权利要求2所述的仿生球面机器人,其特征在于,所述第二运动支链包括有依次连接的第二十一转动副r21、第五连杆(5)、第二十二转动副r22、第六连杆(6)、第二十三转动副r23、第七连杆(7)、第二十四转动副r24;
4.根据权利要求3所述的仿生球面机器人,其特征在于,所述第三运动支链包括有依次连接的第三十一转动副r31、第八连杆(8)、第三十二转动副r32、第九连杆(9)、第三十三转动副r33、第十连杆(10)、第三十四转动副r34;
5.根据权利要求4所述的仿生球面机器人,其特征在于,所述第四运动支链包括有依次连接的第四十一移动副p41、第十一连杆(11)、第四十二转动副r42、第十二连杆(12)、第四十三移动副p43、第十三连杆(13)、第四十四螺旋副h44;
6.根据权利要求5所述的仿生球面机器人,其特征在于,所述第五运动支链包括有依次连接的第五十一移动副p51、第十四连杆(14)、第五十二转动副r52、第十五连杆(15)、第五十三移动副p53、第十六连杆(16)、第五十四移动副p54、第五十五转动副r55、第十七连杆(17)、第五十六移动副p56、第十八连杆(18)、第五十七螺旋副h57;
7.根据权利要求6所述的仿生球面机器人,其特征在于,所述第十一转动副r11,设置有转动电机;第四十一移动副p41及第五十一移动副p51分别设置有移动电机。
技术总结
本发明公开仿生球面机器人,包括有定平台、第一运动支链、第二运动支链、第三运动支链、第四运动支链及第五运动支链;第一运动支链分别与定平台及第二运动支链连接;第二运动支链连接与第三运动支链连接;第四运动支链分别与定平台及第二运动支链连接;第五运动支链与定平台及第三运动支链连接。该机器人可以利用变转动轴线运动其高次连杆曲线实现定轴线运动不容易实现的复杂运动,从而模拟仿生机器人一类复杂的球面运动,降低其控制难度。
技术研发人员:孙戬,兰岚,侯江超,成小乐,刘晖,屈美娇,吴旭明,刘伟
受保护的技术使用者:西安工程大学
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!