消防机器人用消防栓水管的快速自主对接装置
1.本发明涉及消防栓对接装置技术领域,具体地涉及一种消防机器人用消防栓水管的快速自主对接装置。
背景技术:
2.消防机器人能够携带消防水管抵达火灾现场,深入着火火场,对火源直接进行灭火,具有灭火效率高、安全性好的优点,广泛应用于石油化工、工业建设以及电力消防等领域。消防栓在火灾现场的安装位置随机性大,消防栓接口位置和姿态无法准确定位,而消防栓水管的快速对接装置需要较高的对接角度和精度才能进行快速对接,从而保证良好的对接效果和密封性。
3.传统消防机器人需要消防员手动接驳消防水管,在消防员未抵达火灾现场时无法进行自主灭火,极大制约了消防机器人的应用领域和工作效率。
技术实现要素:
4.本发明的目的是为了克服现有技术存在的消防机器人与消防水管对接效率问题,提供一种消防机器人用消防栓水管的快速自主对接装置,该消防机器人用消防栓水管的快速自主对接装置具有高效对接消防机器人与消防水管的功能。
5.为了实现上述目的,本发明提供一种消防机器人用消防栓水管的快速自主对接装置,包括:
6.消防栓夹紧主体;
7.消防栓快速接头,所述消防栓快速接头的一端与所述消防栓夹紧主体连接,所述消防栓快速接头另一端用于连接消防水管对接接头;
8.多个辅助定位抓手,多个所述辅助定位抓手的一端与所述消防栓夹紧主体的侧壁铰接,多个所述辅助定位抓手的另一端均设置有辅助定位夹头以对所述消防水管对接接头进行限位夹紧;
9.多个辅助定位抓手套管,多个所述辅助定位抓手套管的一端均与所述消防栓主体连接;且多个所述辅助定位抓手套管的内部均设置有辅助定位抓手牵引绳索,多个所述辅助定位抓手牵引绳索的一端分别与对应所述辅助定位抓手固接;
10.绳索牵引组件,多个所述辅助定位抓手套管的另一端均与所述绳索牵引组件固接,且多个所述辅助定位抓手牵引绳索的另一端均与所述绳索牵引组件连接,所述绳索牵引组件用于同步调节多个辅助定位抓手相对于所述消防栓夹紧主体的角度以限位夹紧所述消防水管对接接头。
11.可选地,所述快速自主对接装置还包括消防栓夹紧锁止机构,设置在所述消防栓夹紧主体上,所述消防栓夹紧锁止机构通过螺栓连接所述消防栓夹紧主体和所述消防栓快速接头。
12.可选地,所述快速自主对接装置还包括多个辅助定位抓手挂耳,均设置在所述消
防栓夹紧主体上,多个所述辅助定位抓手挂耳分别与多个所述辅助定位抓手通过转轴转动连接。
13.可选地,所述快速自主对接装置还包括多个对接组件,多个所述对接组件分别设置在多个所述辅助定位抓手的内部,所述对接组件包括:
14.对接锁止套环,设置在所述消防水管对接接头的一端附近;
15.移动对接滑轨,设置在所述辅助定位抓手的内部;
16.移动对接滑台,设置在所述移动对接滑轨的内部,且所述移动对接滑台能够沿着所述移动对接滑轨滑动;
17.移动对接拉手套管,一端与所述辅助定位抓手固接,另一端与所述绳索牵引组件连接;
18.移动对接牵引绳索,设置在所述移动对接拉手套管的内部,所述移动对接牵引绳索的一端延伸至所述辅助定位抓手的内部并与所述移动对接滑台固接,所述移动对接牵引绳索的另一端与所述绳索牵引组件连接,所述绳索牵引组件用于带动所述移动对接滑台移动并推动所述对接锁止套环以使得所述消防水管对接接头进入所述消防栓快速接头的内部;
19.对接复位分离弹簧,套设在所述移动对接牵引绳索位于所述辅助定位抓手内部部分的外侧,所述对接复位分离弹簧的一端与所述移动对接滑台的一侧连接,所述对接复位分离弹簧的另一端与所述辅助定位抓手的内壁连接。
20.可选地,所述快速自主对接装置还包括:
21.对接磁环,套设在所述对接锁止套环的外部;
22.移动对接磁铁,设置在所述移动对接滑台朝向所述对接锁止套环的一侧,所述移动对接磁铁用于与所述对接磁环配合吸合以带动所述消防水管对接接头沿着所述消防栓快速接头的轴心移动。
23.可选地,所述辅助定位夹头朝向所述消防水管对接接头的一侧设置有弧面,所述弧面用于与所述消防水管对接接头的侧壁配合以增大所述辅助定位夹头和所述消防水管对接接头的接触面。
24.可选地,所述辅助定位夹头通过螺栓与所述辅助定位抓手连接。
25.可选地,所述快速自主对接装置还包括:
26.两个消防水管固定底座,对称设置在所述消防水管对接接头的外侧;
27.两个消防水管固定磁铁,分别设置在两个所述消防水管固定底座相互远离的一侧,其中一个所述消防水管固定磁铁用于与消防机器人本体进行吸附连接;
28.机械臂安装法兰,所述机械臂安装法兰通过螺栓与机械臂连接;
29.机械臂对接磁铁,所述机械臂对接磁铁通过螺栓与机械臂安装法兰连接,所述机械臂对接磁铁用于与另一个所述消防水管固定磁铁吸附连接。
30.可选地,两个所述消防水管固定底座均通过金属胶水与所述消防水管对接接头连接。
31.可选地,所述快速自主对接装置还包括定位瞄准板,设置在所述消防栓夹紧主体的侧壁,所述定位瞄准板上设置有定位光孔以及视觉测量孔,所述定位光孔和所述视觉测量孔用于与所述机械臂上的相机配合以确定所述消防栓快速接头的位置。
32.通过上述技术方案,本发明提供的消防机器人用消防栓水管的快速自主对接装置通过绳索牵引组件同步调节多个辅助定位抓手转动,在多个辅助定位抓手转动至一定角度时,与辅助定位抓手对应的辅助定位夹头能够对消防水管对接接头进行限位夹紧,进而能够实现消防水管与消防机器人的自主对接的目的,同时也提高了该消防水管与该消防机器人的对接效率。
附图说明
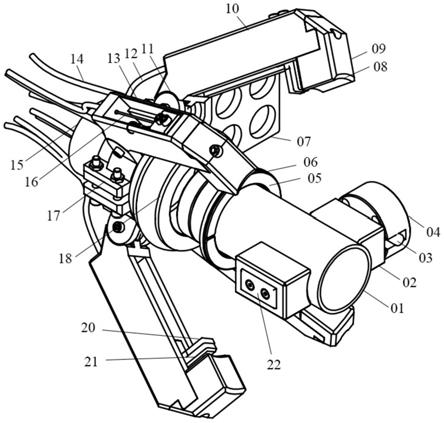
33.图1是根据本发明的一个实施方式的消防机器人用消防栓水管的快速自主对接装置的结构示意图;
34.图2是根据本发明的一个实施方式的消防机器人用消防栓水管的快速自主对接装置的侧视图。
35.附图标记说明
36.01、消防水管对接接头
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
02、消防水管固定底座
37.03、机械臂对接磁铁
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
04、机械臂安装法兰
38.05、对接锁止套环
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
06、对接磁环
39.07、定位瞄准板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
08、弧面
40.09、辅助定位夹头
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10、辅助定位抓手
41.11、辅助定位抓手挂耳
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12、移动对接拉手套管
42.13、移动对接滑轨
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14、辅助定位抓手套管
43.15、消防栓夹紧主体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
16、移动对接牵引绳索
44.17、消防栓夹紧锁止机构
ꢀꢀꢀꢀꢀꢀꢀꢀ
18、消防栓快速接头
45.19、对接复位分离弹簧
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20、移动对接磁铁
46.21、移动对接滑台
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
22、消防水管固定磁铁
具体实施方式
47.以下结合附图对本发明实施例的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明实施例,并不用于限制本发明实施例。
48.图1是根据本发明的一个实施方式的消防机器人用消防栓水管的快速自主对接装置的结构示意图。在图1中,该消防机器人用消防栓水管的快速自主对接装置可以包括消防栓夹紧主体15、消防栓快速接头18、多个辅助定位抓手10、多个辅助定位抓手套管14以及绳索牵引组件。具体地,该辅助定位抓手10还可以包括辅助定位夹头09,该辅助定位抓手套管还可以包括辅助定位抓手牵引绳索。
49.消防栓快速接头18的一端与消防栓夹紧主体15连接,消防栓快速接头18另一端用于连接消防水管对接接头01;多个辅助定位抓手10的一端与消防栓夹紧主体15的侧壁铰接,多个辅助定位抓手10的另一端均设置有辅助定位夹头09以对消防水管对接接头01进行限位夹紧;多个辅助定位抓手套管14的一端均与消防栓主体15连接;且多个辅助定位抓手套管14的内部均设置有辅助定位抓手牵引绳索,多个辅助定位抓手牵引绳索的一端分别与对应辅助定位抓手10固接;多个辅助定位抓手套管14的另一端均与绳索牵引组件固接,且多个辅助定位抓手牵引绳索的另一端均与绳索牵引组件连接,绳索牵引组件用于同步调节
多个辅助定位抓手10相对于消防栓夹紧主体15的角度以限位夹紧消防水管对接接头01。
50.在需要对接消防水管与消防机器人时,消防机器人将消防水管对接接头01的一端移动至消防栓快速接头18的另一端,绳索牵引组件同步牵引多个辅助定位抓手牵引绳索,进而改变多个辅助定位抓手牵引绳索的长度,使得多个辅助定位抓手牵引绳索分别带动对应的辅助定位抓手10的一端沿着消防栓主体15转动,多个辅助定位抓手10的另一端相互靠近直至对应的辅助定位夹头09与消防水管对接接头01的侧壁紧密贴合,即可实现对该消防水管对接接头01与消防栓快速接头18的稳定连接。
51.在传统的消防机器人与消防水管的连接方式中,需要消防员手动接驳消防水管,但是在消防员未抵达火灾现场时,消防机器人无法进行自主灭火,进而影响了消防机器人的工作效率。在本发明的该实施方式中,采用绳索牵引组件牵引多个辅助定位抓手10转动的方式,使得多个辅助定位夹头09能够对消防水管对接接头01的侧壁进行限位夹持,进而实现了消防水管对接接头01与消防机器人自主对接的目的,便于消防机器人能够及时进行消防工作,即提高了该消防机器人的工作效率。
52.在本发明的该实施方式中,对于该消防栓夹紧主体15与消防栓快速接头18的连接方式,可以是本领域人员所知的多种形式,例如螺栓连接、法兰连接等。但是在本发明的一个优选示例中,考虑到该消防栓夹紧主体15与消防栓快速接头18连接的紧密性,该消防栓夹紧主体15与消防栓快速接头18的连接具体连接方式可以如图1所示。具体地,在图1中,该消防栓夹紧主体15与消防栓快速接头18的连接组件可以包括消防栓夹紧锁止机构17。
53.消防栓夹紧锁止机构17设置在消防栓夹紧主体15上,消防栓夹紧锁止机构17通过螺栓连接消防栓夹紧主体15和消防栓快速接头18。
54.在本发明的该实施方式中,对于该消防栓夹紧锁止机构17的具体结构可以是本领域人员所知的多种形式,例如两个圆筒、两个半圆筒等。但是在本发明的一个优选示例中,考虑到该消防栓夹紧锁止机构17对消防栓夹紧主体15和消防栓快速接头18固定的便捷性,该消防栓夹紧锁止机构17可以包括两个半圆筒。具体地,两个半圆筒凹面相对贴合构成圆筒,两个半圆筒贴合处凸出设置有多个连接板,多个连接板上开设有螺栓安装孔。
55.在用两个半圆筒贴合后的两端分别套入消防栓夹紧主体15和消防栓快速接头18后,螺栓通过多个螺栓安装孔对两个半圆筒进行固定即可实现对防栓夹紧主体15和消防栓快速接头18的连接。
56.在本发明的该实施方式中,对于该辅助定位抓手10与消防栓夹紧主体15铰接的具体结构,可以是本领域人员所知的多种形式,例如转轴连接、合页连接等。但是在本发明的一个优选示例中,考虑到该辅助定位抓手10转动的流畅性,该辅助定位抓手10与消防栓夹紧主体15铰接的具体结构可以如图1所示。具体地,在图1中,该辅助定位抓手10与消防栓夹紧主体15铰接的具体结构可以包括辅助定位抓手挂耳11以及转轴。
57.辅助定位抓手挂耳11设置在消防栓夹紧主体15上,辅助定位抓手挂耳11分别与多个辅助定位抓手10通过转轴转动连接。
58.在本发明的该实施方式中,该快速自主对接装置还可以包括复位扭簧。具体地,该扭簧套设在转轴上,扭簧的一端与辅助定位抓手挂耳11连接,扭簧的另一端与辅助定位抓住10连接。
59.在需要对接消防栓快速接头18和消防水管对接接头01前,通过绳索牵引组件驱动
多个辅助定位抓手10的另一端展开,以便于消防机器人将消防水管对接接头01移动至多个辅助定位抓手10的中间。在多个辅助定位抓手10展开时,扭簧跟随转动并被挤压,在需要固定该消防水管对接接头01时,扭簧带动多个辅助定位抓手10转动复位并对该消防水管对接接头01进行限位固定,进一步提高了消防机器人与消防水管对接接头01的对接效率。
60.在本发明的该实施方式中,如图1和图2所示,该快速自主对接装置还可以包括多个对接组件,多个对接组件分别设置在多个辅助定位抓手10的内部。具体地,该对接组件可以包括对接锁止套环05、移动对接滑轨13、移动对接滑台21、移动对接拉手套管12、移动对接牵引绳索16以及对接复位分离弹簧19。
61.对接锁止套环05设置在消防水管对接接头01的一端附近;移动对接滑轨13设置在辅助定位抓手10的内部;移动对接滑台21设置在移动对接滑轨13的内部,且移动对接滑台21能够沿着移动对接滑轨13滑动;移动对接拉手套管12的一端与辅助定位抓手10固接,移动对接拉手套管12的另一端与绳索牵引组件连接;移动对接牵引绳索16设置在移动对接拉手套管12的内部,移动对接牵引绳索16的一端延伸至辅助定位抓手10的内部并与移动对接滑台21固接,移动对接牵引绳索16的另一端与绳索牵引组件连接,绳索牵引组件用于带动移动对接滑台21移动并推动对接锁止套环05以使得消防水管对接接头01进入消防栓快速接头18的内部;对接复位分离弹簧19套设在移动对接牵引绳索16位于辅助定位抓手10内部部分的外侧,对接复位分离弹簧19的一端与移动对接滑台21的一侧连接,对接复位分离弹簧19的另一端与辅助定位抓手10的内壁连接。
62.在多个辅助定位抓手10对消防水管对接接头01限位夹持后,绳索牵引组件牵引移动对接牵引绳索16移动,使得移动对接牵引绳索16能够带动移动对接滑台21沿着移动对接滑轨13移动并逐渐靠近对接锁止套环05。在移动对接滑台21与对接锁止套环05接触后,移动对接滑台21通过锁止套环05带动消防水管对接接头01沿着消防栓快速接头18的内部移动,直至消防水管对接接头01移动至消防栓快速接头18的锁止位置,进而实现了消防水管对接接头01与消防栓快速接头18的紧密连接。在移动对接牵引绳索16带动移动对接滑台21移动的过程中,同步带动移动对接滑台21压缩对接复位分离弹簧19,在消防水管对接接头01与消防栓快速接头18的紧密连接后,该对接复位分离弹簧19能够驱动移动对接滑台21复位。
63.在本发明的该实施方式中,如图1所示,该快速自主对接装置还可以包括对接磁环06以及移动对接磁环20。
64.对接磁环06套设在对接锁止套环05的外部;移动对接磁铁20设置在移动对接滑台21朝向对接锁止套环05的一侧,移动对接磁铁20用于与对接磁环06配合吸合以带动消防水管对接接头01沿着消防栓快速接头18的轴心移动。
65.在移动对接牵引绳索16带动移动对接滑台21移动的过程中,对接磁铁20与对接磁环06相互吸合,加速移动对接滑台21在移动对接滑轨13上移动,进而提高了消防水管对接接头01与消防栓快速接头18的紧密连接的效率。
66.在本发明的该实施方式中,如图1和图2所示,该快速自主对接装置还可以包括弧面08。
67.辅助定位夹头09朝向消防水管对接接头01的一侧设置有弧面08,弧面08用于与消防水管对接接头01的侧壁配合以增大辅助定位夹头09和消防水管对接接头01的接触面。
68.在辅助定位夹头09对消防水管对接接头01进行限位夹持时,辅助定位夹头09的弧面08与消防水管对接接头01的侧壁贴合,通过提高辅助定位夹头09与消防水管对接接头01的接触面能够增加该辅助定位夹头09对消防水管对接机头01限位夹持的稳定性。
69.在本发明的该实施方式中,对于辅助定位夹头09与辅助定位抓手10的连接方式可以是本领域人员所知的多种形式,例如焊接、粘接等。但是在本发明的一个优选示例中,考虑到辅助定位夹头09与辅助定位抓手10连接的可靠性,该辅助定位夹头09与辅助定位抓手10通过螺栓连接。
70.在本发明的该实施方式中,如图1和图2所示,该快速自主对接装置还可以包括两个消防水管固定底座02、两个消防水管固定磁铁22、机械臂安装法兰04以及机械臂对接磁铁03。
71.两个消防水管固定底座02对称设置在消防水管对接接头01的外侧;两个消防水管固定磁铁22分别设置在两个消防水管固定底座02相互远离的一侧,其中一个消防水管固定磁铁22用于与消防机器人本体进行吸附连接;机械臂安装法兰04通过螺栓与机械臂连接;机械臂对接磁铁03通过螺栓与机械臂安装法兰04连接,机械臂对接磁铁03用于与另一个消防水管固定磁铁22吸附连接。
72.在需要对接消防栓快速接头18和消防水管对接接头01前,移动机械臂的位置,使得机械臂对接磁铁03与另一个消防水管固定磁铁22吸附。在机械臂对该消防水管对接接头01吸附后,通过机械臂将该消防水管对接接头01移动至固定位置,该固定位置为其中一个消防水管固定磁铁22能够与消防机器人本体进行吸附的位置,进而实现了对消防水管对接接头01的对接位置的限定,便于后续消防水管对接接头01与消防栓快速接头18对接操作的进行。
73.在本发明的该实施方式中,对于两个消防水管固定底座02与消防水管对接接头01的连接方式,可以是本领域人员所知的多种形式,例如磁吸、粘贴等。但是在本发明的一个优选示例中,考虑到两个消防水管固定底座02与消防水管对接接头01连接的有效性,两个消防水管固定底座02与消防水管对接接头01可以通过金属胶水进行连接。
74.在本发明的该实施方式中,如图1和图2所示,该快速自主对接装置还可以包括定位瞄准板07。
75.定位瞄准板07设置在消防栓夹紧主体15的侧壁,定位瞄准板07上设置有定位光孔以及视觉测量孔,定位光孔和视觉测量孔用于与机械臂上的相机配合以确定消防栓快速接头18的位置。具体地,该定位瞄准板07通过螺栓与消防栓夹紧主体15连接。
76.在机械臂对接磁铁03与另一个消防水管固定磁铁22吸附后,机械臂上的相机能够通过定位瞄准板07上的定位光孔和视觉测量孔对消防水管对接接头01的位置和姿态进行测量,并将测量的信号发送给机械臂,驱动机械臂将该消防水管对接接头01移动至预设位置,以保障该消防水管对接接头01与消防栓快速接头18同轴,进一步提高了消防水管对接接头01与消防栓快速接头18对接的精确性。
77.在本发明的该实施方式中,对于辅助定位抓手10的数量可以是本领域人员所知的多种形式,例如2个、3个等。但是在本发明的一个优选示例中,考虑到对消防水管对接接头01限位夹持的稳定性,该辅助定位抓手10的数量可以如图1和图2所示。具体地,在图1和图2中,该辅助定位抓手10的数量为4。
78.在本发明的该实施方式中,对于绳索牵引组件的具体结构可以是本领域人员所知的多种形式,例如电机与滚轮的配合机构、液压缸等。但是在本发明的一个优选示例中,考虑到对绳索牵引的简单性以及快捷性,该绳索牵引组件可以为电机与滚轮的配合机构。具体地,辅助定位抓手牵引绳索的另一端和/或移动对接牵引绳索16的另一端与套设在滚轮上且与滚轮连接,电机的输出端与滚轮的侧壁连接用以带动滚轮转动。具体地,在需要牵引辅助定位抓手牵引绳索和/或移动对接牵引绳索16移动时,通过电机驱动滚轮转动即可实现。
79.通过上述技术方案,本发明提供的消防机器人用消防栓水管的快速自主对接装置通过绳索牵引组件同步调节多个辅助定位抓手10转动,在多个辅助定位抓手10转动至一定角度时,与辅助定位抓手10对应的辅助定位夹头09能够对消防水管对接接头01进行限位夹紧,进而能够实现消防水管与消防机器人的自主对接的目的,同时也提高了该消防水管与该消防机器人的对接效率。
80.以上结合附图详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种简单变型,这些简单变型均属于本发明的保护范围。另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本发明对各种可能的组合方式不再另行说明。
81.此外,本发明的各种不同的实施方式之间也可以进行任意组合,只要其不违背本发明的思想,其同样应当视为本发明所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1