全氟己酮室内灭火机器人的制作方法
1.本实用新型涉及消防设备技术领域,更具体地说,它涉及一种全氟己酮室内灭火机器人。
背景技术:
2.博物馆的收藏品一般是具有历史、自然和艺术价值的丰富文物,是不可再生的宝贵资源。博物管也是一个城市、地区、国家的缩影,也有出现过由于消防设备不合格,导致出现大量文物损坏的例子(由于消防设施缺水耽误灭火,巴西国家博物馆90%的文物付之一炬)。另外,作为历史遗留的产物,在此类建筑内搭建管网灭火系统,影响了建筑的年代性研究,缺少了古建筑的美观,且水系统和泡沫灭火,会给文物带来伤害,与此类似,档案馆、贵重设备间等空间大,保护对象小且布置分散的场所也需要新型灭火装置,而全氟己酮局部灭火,能完全符合这类场所灭火要求。
3.因此,为了加强技术防范建设,确保博物馆等历史文物、内部游客以及工作人员的安全,此类建筑应及时更新完善灭火设备,并提出了全氟己酮室内灭火机器人的方案理念,改善博物馆等建筑的消防安全管理。
技术实现要素:
4.本实用新型的目的在于克服上述现有技术中的不足,提供一种全氟己酮室内灭火机器人。
5.为解决上述技术问题,本实用新型的目的是这样实现的:本实用新型所涉及的一种全氟己酮室内灭火机器人,包括机身,机身上设有行走机构以及给予行走机构供电的充电电源,其特征在于:所述机身上设有计算行走路径并控制行走机构沿所计算路径移动的工控机,工控机上电连接有设在所述机身上的激光导航装置、监测装置、信号天线、烟感探测器和声光报警器,所述机身上设有带压带压药剂储罐,带压带压药剂储罐上设有药剂喷放管,药剂喷放管的一端设有喷头、另一端连接有装有电磁驱动装置的容器阀,容器阀控制带压带压药剂储罐内的药剂实现喷放。
6.本实用新型进一步设置为:还包括设在机身外且与所述充电电源相匹配的充电桩。
7.本实用新型进一步设置为:所述机身上设有与工控机电连接的急停开关。
8.本实用新型进一步设置为:所述监测装置包括红外线探测摄像头和视觉摄像头。
9.本实用新型进一步设置为:所述机身上设有防撞条。
10.本实用新型进一步设置为:所述机身上还设有红外线温度识别模块以及火焰视觉复核模块。
11.综上所述,本实用新型具有以下有益效果:
12.1.具有自动寻火并灭火的功能,实现全自动灭火;
13.2.利用全氟己酮局部灭火的方式进行灭火,灭火效果更好;
14.3.利用室内灭火机器人进行灭火,使防护区范围增大,并减少了药剂使用量;
15.4.具有自动避障功能,可适用于比较复杂的场所;
16.5.实现灭火设备的全寿命周期的监测,保证灭火设备的可靠性;
17.6.可切换手动和自动模式,可应对各种情况;
18.7.机器人各项数据上传平台,可由平台查看机器人运行状态;
19.8.机器人有自主充电和返回巡查点的功能,保证24小时全程监控;
20.9.机器人支持多种通讯协议,可以和多类消防探测传感器实现联动;
21.10.机器人具有红外线温度识别功能和火焰视觉复核功能,通过多种方式探测并确认火灾,能避免机器人会产生误喷并造成财产损失。
附图说明
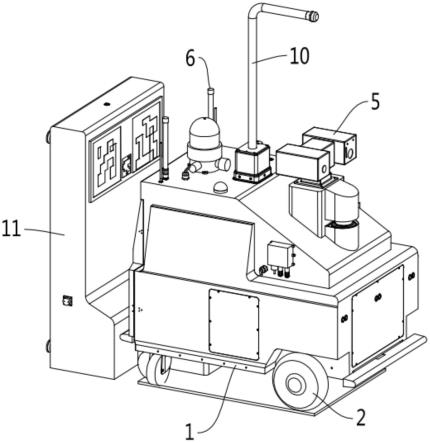
22.图1是本实用新型的整体结构示意图;
23.图2是本实用新型的部分结构示意图。
具体实施方式
24.为了使本领域的技术人员更好地理解本实用新型的技术方案,下面结合具体实施例对本实用新型的优选实施方案进行描述,但是应当理解,这些描述只是为了进一步说明本实用新型的特征和优点,而不是对本实用新型专利要求的限制。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
25.下面结合附图和优选实施例对本实用新型进一步说明。
26.实施例1
27.参见图1和图2所示,本实施例所涉及的一种全氟己酮室内灭火机器人,包括机身1,机身1上设有行走机构2以及给予行走机构2供电的充电电源(图中未示出),所述机身1上设有计算行走路径并控制行走机构2沿所计算路径移动的工控机3,工控机3上电连接有设在所述机身1上的激光导航装置4、监测装置5、信号天线6、烟感探测器7和声光报警器8,所述机身1上设有带压药剂储罐9,带压药剂储罐9上设有药剂喷放管10,药剂喷放管10的一端设有喷头(图中未示出)、另一端连接有装有电磁驱动装置的容器阀(图中未示出),容器阀控制带压药剂储罐9内的药剂实现喷放。
28.进一步的,还包括设在机身1外且与所述充电电源相匹配的充电桩11。
29.进一步的,所述机身1上设有与工控机3电连接的急停开关12。
30.进一步的,所述监测装置5包括红外线探测摄像头和视觉摄像头。
31.进一步的,所述机身1上设有防撞条13。
32.进一步的,所述机身上还设有红外线温度识别模块以及火焰视觉复核模块。
33.在本实施方案中,平时监测装置5在防护区内进行360度旋转探测,当红外探测摄像头探测到高热火源后,立刻停止旋转,并通过视觉摄像头,使用工控机3控制行走机构2,使机身1移动至高热火源,期间,声光报警器8发出报警,并按照高热点方向,通过激光导航装置4确定到火焰的距离从而确定火焰的具体位置,之后由工控机3分析路径,行走机构2完成移动,移动至火焰前两米处。开启电磁驱动装置,药剂储罐9内的气压将药剂压至药剂喷
放管10,沿喷头喷出,进行灭火。灭火完成后,通过监测装置5检查火焰是否被扑灭,若扑灭,机器人将自行返回充电桩11处进行充电。
34.全过程中,机器人的报警及行进记录、视频、带压药剂储罐9中的压力数据会由工控机3采集,并通过信号天线6传输至平台,较近火灾会通过烟感探测器7来识别,机器人会通过激光导航装置4实现激光避障功能,遇见障碍物会自动避开,若撞上障碍物,会由防撞条13采集信号,机器人自动停止运动。若出现紧急状况,可按下急停开关12使机器人停止运动。此外机器人配备遥控器,可以直接操作机器人进行灭火动作。
35.其中,机器人集成红外测温传感器和烟雾探测器,支持360
°
全空间无限位探测,支持8-14um宽光谱范围,单向探测距离40m,测温精度正负2℃。机器人具有激光雷达导航功能,能自主避障,最高移动速度1.5m/s,负载100kg。机器人具备自主充电功能,支持7*24小时待机。机器人续航里程10km,定位精度正负5cm。机器人探测到火焰后,可自动朝着火焰方向移动,并在离火焰约2m的地方停止,通过启动电磁驱动装置开启灭火装置进行气体灭火。灭火结束后,机器人可回归至相应位置进行自动充电。机器人具备报警功能。机器人适用于室内平整地面,火焰检测与机器人行进路线为直线,过程无遮挡。
36.本实用新型所涉及的全氟己酮室内灭火机器人,通过使用气体灭火剂进行局部灭火;通过红外探测摄像和火焰识别系统找到火焰的方向,并通过激光探测测出到火焰的距离,从而找出火焰的具体位置的火焰探测方式。
37.如无特殊说明,本实用新型中,若有术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系是基于实际所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此本实用新型中描述方位或位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以结合实施例,并根据具体情况理解上述术语的具体含义。
38.除非另有明确的规定和限定,本实用新型中,若有术语“设置”、“相连”及“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接连接,也可以通过中间媒介间接连接,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
39.以上详细描述了本实用新型的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本实用新型的构思做出诸多修改和变化。因此,凡本技术领域中技术人员依本实用新型的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1