一种运用于深井、管道救援的辅助装置的制作方法
1.本发明涉及深井救援设备技术领域,更具体地说,特别涉及一种运用于深井、管道救援的辅助装置的技术领域。
背景技术:
2.深井救援通常是指在一种空间较为的狭窄区域进行救援,因为其深井救援空间狭窄的问题导致其无法进入多个施救人员,因此需要其打捞设备来对其进行更加方便的救援,但现有的运用于深井、管道救援的辅助装置通常只是简单的将绳索连接在被救人员身上,然后通过对绳索进行拉扯来将其进行救出,而这样的救援方式较为的单一无法应对其多种的情况进行救援,使得其救援的效率较低,同时在救援的过程中无法有效的防止的二次滑落,以及无法精确有效的控制其抓手来固定在人员身上进行救援,而且无法方便的对深井以及狭小空间的内部进行观察导致影响救援问题。
技术实现要素:
3.(一)技术问题综上所述,提供一种运用于深井、管道救援的辅助装置,用来解决现有的运用于深井、管道救援的辅助装置救援方式单一无法灵活的应对多种救援情况以及无法方便的对狭小空间进行伸入救援的问题。
4.(二)技术方案一种运用于深井、管道救援的辅助装置,包括有主体、固定底座、机械臂和导轮,主体底端嵌合设置有固定底座,主体中部嵌合设置有机械臂,主体一侧嵌合设置有导轮,其特征在于;机械臂可拆装组合连接有两爪抓手、单直臂回勾、四爪抓手、钢线抓手、伞型抓钩、四直臂回勾抓手、弧形抓手、宽带套圈抓手,导轮中部嵌合设置有滑轮,滑轮一侧通过传动轴贯穿导轮一侧嵌合连接,滑轮两侧固定连接有限定盘,限定盘周围嵌合设置有圆弧块,导轮贴合限定盘一侧顶端固定连接有贴合块,主体中部嵌合设置有安全气囊。
5.进一步的,抓手包括有安全气囊、宽带套圈抓手、钢线抓手、单直臂回勾、四直臂回勾抓手、伞型抓勾、弧形抓手类型可进行活动组合连接进行设置。
6.进一步的,导轮包括有滑轮、传动轴、限定盘和贴合块,滑轮为嵌合设置在导轮之间的圆轴,传动轴为贯穿导轮嵌合连接在滑轮内的圆轴,限定盘为滑轮两端直径更大的圆盘,贴合块为导轮贴合限定盘一侧长方形状凸块,且贴合块凸出部分底端为弧形凹槽设置与限定盘贴合。
7.进一步的,滑轮包括有螺纹槽,螺纹槽为滑轮一侧与传动轴螺纹嵌合的圆柱形状凹槽。
8.进一步的,限定盘包括有圆弧块、嵌合槽、连接盘、复位槽和复位块,圆弧块为限定盘周围若干嵌合设置的圆弧弯曲状三角形状凸块,嵌合槽为限定盘周围与圆弧块相嵌合的凹槽,连接盘为嵌合槽开槽一端两侧圆盘状凸块,且圆弧块一端与连接盘嵌合连接,复位槽
为嵌合槽设置连接盘一端之间圆弧状凹槽,复位块为圆弧块连接在连接盘之间一端与复位槽宽度嵌合的凸块,且复位块一端通过弹簧与复位槽一端进行连接。
9.进一步的,贴合块包括有圆弧槽和倾斜弧面,圆弧槽为贴合块贴合限定盘部分表面若干与圆弧块嵌合的凹槽,倾斜弧面为贴合块设置圆弧槽处前端部分呈倾斜状弧形设置。
10.(三)有益效果(1)通过该装置中机械臂来连接两爪抓手、单直臂回勾、四爪抓手、钢线抓手、伞型抓钩、四直臂回勾抓手、弧形抓手、宽带套圈抓手中任意一个进行组合,来让其应对不同情况的深井救援,使得其在救援过程中不会受到深井直径深度等不同情况的影响而导致救援的时候较为的麻烦,然后安全气囊能够在救援的过程中膨胀在被救援人员下方防止其二次滑落,同时通过外部控制器的控制和摄像头的监控让其在控制机械臂上抓手进行救援的时候更加的方便,也能够更好的掌握深井内部的情况进行更好的救援。
11.(2)该装置中的机械臂通过其控制系统让控制器能够进行远程的遥控,使得其在操作机械臂带动各种抓手进行救援的时候更加的方便有效,同时也能够更好的控制机械臂进行活动以及本身发生360度的旋转和左右摆动,让其能够更好的寻找接触到被救援人员。
12.(3)该装置还设置有圆弧块,通过圆弧块能够在需要通过导轮来人为进行牵引绳拉扯的时候,能够在控制滑轮旋转的时候,对其旋转的方向进行限定,防止其因为牵引绳连接物体重量的原因导致其,牵引绳自行被拉出放出。
13.(4)该装置还设置有复位块,通过复位块能够在与圆弧块进行嵌合对滑轮进行旋转限定的同时,也通过通过其滑轮的位移来改变其需要进行旋转方向的限定,让在滑轮不止在进行收纳旋转的同时在放出的时候也能够对其进行旋转防止其自行放出。
附图说明
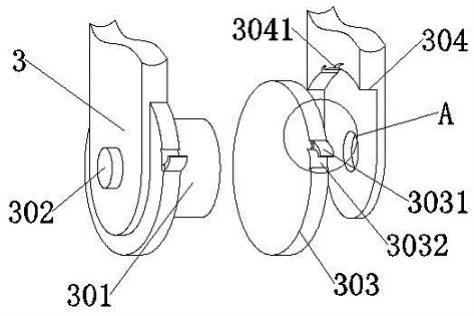
14.图1为本发明的整体结构示意图;图2为本发明导轮的整体结构示意图;图3为本发明导轮的分离结构示意图;图4为本发明图3中a处的放大结构示意图;图5为本发明圆弧块与圆弧槽的连接结构示意图;图6为本发明滑轮的侧视剖面结构示意图;图7-14为本发明中机械臂可连接的各类抓手整体结构示意图;在图1至图14,部件名称或线条与附图编号的对应关系为:主体1、固定底座101、机械臂2、两爪抓手201、单直臂回勾202、四爪抓手203、钢线抓手204、伞型抓钩205、四直臂回勾抓手206、弧形抓手207、宽带套圈抓手208、导轮3、滑轮301、螺纹槽3011、传动轴302、限定盘303、圆弧块3031、嵌合槽3032、连接盘3033、复位槽3034、复位块3035、贴合块304、圆弧槽3041、倾斜弧面3042、安全气囊4。
具体实施方式
15.请参考图1至图14:一种运用于深井、管道救援的辅助装置,包括有主体1、固定底座101、机械臂2和导
轮3,主体1底端嵌合设置有固定底座101,主体1中部嵌合设置有机械臂2,主体1一侧嵌合设置有导轮3,其特征在于;机械臂2底端嵌合设置有抓手201,导轮3中部嵌合设置有滑轮301,滑轮301一侧通过传动轴302贯穿导轮3一侧嵌合连接,滑轮301两侧固定连接有限定盘303,限定盘303周围嵌合设置有圆弧块3031,导轮3贴合限定盘303一侧顶端固定连接有贴合块304,主体1中部嵌合设置有安全气囊4。
16.优选的,机械臂2包括有两爪抓手201、单直臂回勾202、四爪抓手203、钢线抓手204、伞型抓钩205、四直臂回勾抓手206、弧形抓手207、宽带套圈抓手208任意一个进行组合连接。
17.优选的,机械臂2通过电源供电,且机械臂2通过信号与导线与控制器信号电性连接一起,然后通过控制器控制机械臂2带动两爪抓手201、单直臂回勾202、四爪抓手203、钢线抓手204、伞型抓钩205、四直臂回勾抓手206、弧形抓手207和宽带套圈抓手208进行活动使用。
18.优选的,导轮3包括有滑轮301、传动轴302、限定盘303和贴合块304,滑轮301为嵌合设置在导轮3之间的圆轴,传动轴302为贯穿导轮3嵌合连接在滑轮301内的圆轴,限定盘303为滑轮301两端直径更大的圆盘,贴合块304为导轮3贴合限定盘303一侧长方形状凸块,且贴合块304凸出部分底端为弧形凹槽设置与限定盘303贴合。当需要对牵引绳进行放出的时候,需要对滑轮301进行控制反向进行旋转,将牵引绳放出,而在控制传动轴302反向旋转带动滑轮301旋转放出的时候,因为其其中一端限定盘303通过圆弧块3031限定在圆弧槽3041中无法进行旋转,因此传动轴302会单独在螺纹槽3011中进行旋转,而因为传动轴302与螺纹槽3011的螺纹嵌合,使得传动轴302旋转时会带动整个滑轮301想一侧进行移动,从而让滑轮301另一个限定盘303贴合到另一侧的贴合块304中,而其中限定盘303两侧和贴合块304中的圆弧槽3041是相反进行设置,使得其滑轮301在进行牵引绳放出的时候也能够通过圆弧块3031进行旋转,使得其在人为控制导轮3收放牵引绳的时候能够对其进行一定的限定,防止其在收发过程中因为连接物体的重量而自行被拉扯出。
19.优选的,滑轮301包括有螺纹槽3011,螺纹槽3011为滑轮301一侧与传动轴302螺纹嵌合的圆柱形状凹槽。
20.优选的,限定盘303包括有圆弧块3031、嵌合槽3032、连接盘3033、复位槽3034和复位块3035,圆弧块3031为限定盘303周围若干嵌合设置的圆弧弯曲状三角形状凸块,嵌合槽3032为限定盘303周围与圆弧块3031相嵌合的凹槽,连接盘3033为嵌合槽3032开槽一端两侧圆盘状凸块,且圆弧块3031一端与连接盘3033嵌合连接,复位槽3034为嵌合槽3032设置连接盘3033一端之间圆弧状凹槽,复位块3035为圆弧块3031连接在连接盘3033之间一端与复位槽3034宽度嵌合的凸块,且复位块3035一端通过弹簧与复位槽3034一端进行连接。
21.优选的,贴合块304包括有圆弧槽3041和倾斜弧面3042,圆弧槽3041为贴合块304贴合限定盘303部分表面若干与圆弧块3031嵌合的凹槽,倾斜弧面3042为贴合块304设置圆弧槽3041处前端部分呈倾斜状弧形设置。
22.(四)工作原理本发明提供了一种运用于深井、管道救援的辅助装置,首先把摄像头卸入井下,打开语音对讲和感温系统,观察被施救人员,如有生命迹象,可对讲并则试温度,将送氧管卸到井下,启动发电机、气泵送氧,并调整温度,观察被施救人员的形态,然后研究出最佳施救
方案进行施救,支起主体1,通过固定底座将主体1周围的三角固定夹稳定放置好,按好搅盘,挂上吊导轮3,挂上控制器,打开控制器和摇控器电源开关,接上控制架,接上机械臂2,再选择合适的抓手201对接,所有的接头都是快接,锁住接头,卸到井下开始工作。而其中机械臂2可与两爪抓手201、单直臂回勾202、四爪抓手203、钢线抓手204、伞型抓钩205、四直臂回勾抓手206、弧形抓手207、宽带套圈抓手208,类型进行随时的更换使用,以此来应对不同情况的救援,而在进行救援的过程中先通过将安全气囊4移动放置到被救援人员的下方,然后通过对安全气囊4进行充气使得其能够膨胀起来,让其能够对被救援人员的下方进行阻挡,防止在救援过程中人员发生下滑加大救援难度,其中安全气囊4:气囊设有安全阀,主要针对被施救人员卡在井中间时,将气囊送到被施救人员的身体下方,把气囊吹开,防止被施救者下滑,托住再救,避免受到二次伤害;宽带套圈抓手208:可任意大小,最大可放大直径65公分,可套任何一个合适的部位,腰部、手腕、脚腕;钢线抓手204:可任意大小,可套手腕、脚脖;单直臂回勾202:可以从下边托臀部,它还可以在狭缝里,从被施救者的身下方,将带子送过去,使另一个抓手抓住;四直臂回勾抓手206:是在狭小空间,其它抓手不便张开时使用,可勾两腋下,宽窄可以调整;伞型抓勾205:以很小的空间送到被施救者的身下张开,可以勾住被施救者;弧形抓手207:可抓腰部和两腋下;两爪,四爪,可抓两臂等,必要时,可先调整一下被施救者的姿势;总之要拿出合理的方案,选择合适的抓手,抓合适的部位,所有抓手的力度已调试,并加有橡胶套,仔细观察,灵活使用,慎防伤害到被施救者,安全救出;同时机械臂2本身可以通过连接两种不同类型的抓手进行同时工作,让其使用的时候能够配合一起进行工作,使得救援更加的方便和有效,而且机械臂2本身可进行360的旋转已经左右的摆动让其,在深入井下进行救援工作的时候能够更好的寻找接触到目标,让救援更加顺利,然后在通过机械臂2升降的时候也需要通过导轮3来带动其牵引绳来人为的对其进行拉扯,而在通过导轮3进行拉扯的时候是通过其转动传动轴302来让滑轮301进行旋转,然后对牵引绳进行收纳缠绕进行的,当滑轮301旋转对牵引绳进行收纳缠绕的时候,其两端的限定盘303其中一端的会贴合在滑轮301的贴合块304底端,而限定盘303周围的圆弧块3031其弯曲倾斜的角度与其中一侧贴合块304中设置的圆弧槽3041开设角度是一致的,因此在限定盘303收纳旋转的时候圆弧块3031会抵住到贴合块304底端的表面,圆弧块3031会收缩到嵌合槽3032中进行嵌合,使得其限定盘303能够顺利贴合在贴合块304下进行旋转对牵引绳进行旋转收纳,而同时因为圆弧块3031是通过与嵌合槽3032一端的连接盘3033进行活动连接的,使得圆弧块3031能够受力偏转嵌合到嵌合槽3032中,而在圆弧块3031发生偏转嵌合的时候一端的复位块3035会沿着复位槽3034进行移动对弹簧进行压缩,使得其圆弧块3031能够自行因为弹力进行复位,而如果在滑轮301进行旋转收纳的时候,如果滑轮301因为牵引绳重量而自行延伸出时会带动滑轮301进行反向旋转,而这时圆弧块3031会因为复位弹性而弹出嵌合到圆弧槽3041中,然后因为滑轮301的旋转让圆弧块3031完全嵌合进圆弧槽3041中,来对圆弧块3031进行限定,使得其限定盘303不会因为在没有施力的情况下自行发生旋转让牵引绳延伸出,而当需要对牵引绳进行放出的时候,需要对滑轮301进行控制反向进行旋转,将牵引绳放出,而在控制传动轴302反向旋转带动滑轮301旋转放出的时候,因为其其中一端限定盘303通过圆弧块3031限定在圆弧槽3041中无法进行旋转,因此传动轴302会单独在螺纹槽3011中进行旋转,而因为传动轴302与螺纹槽3011的螺纹嵌合,使得传动轴302旋转时会带动整个滑轮301想一侧进行移动,从而让滑轮301另一个限定盘303贴
合到另一侧的贴合块304中,而其中限定盘303两侧和贴合块304中的圆弧槽3041是相反进行设置,使得其滑轮301在进行牵引绳放出的时候也能够通过圆弧块3031进行旋转,使得其在人为控制导轮3收放牵引绳的时候能够对其进行一定的限定,防止其在收发过程中因为连接物体的重量而自行被拉扯出。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1