一种智能机器人的消防装置的制作方法
1.本实用新型涉及一种巡检机器人,特别是一种智能机器人的消防装置。
背景技术:
2.消防灭火是当今消防领域的重要问题,随着人工智能和先进工业技术及自动化技术的发展,智能消防机器人应运而生。在面对易燃,易爆,有毒气体等高风险条件时,很容易造成消防人员的无谓伤亡,智能消防机器人的出现对于消防工作的顺利开展具有重要而深远意义,智能消防机器人可以自主对火源点巡查和预警;但是,其无法对火源进行有效的灭火打击处理,导致火情处理存在一定的滞后性。因此,现有的技术存在着无法进行灭火打击处理的问题。
技术实现要素:
3.本实用新型的目的在于,提供一种一种智能机器人的消防装置及方法。本实用新型具有能够对火源进行有效的打击处理的特点。
4.本实用新型的技术方案:一种智能机器人的消防装置,包括设置在机器人底盘上的主控模块和消防材料存储发射模块;机器人底盘的前后两端分别设有双轴云台和双光云台,双轴云台上设有喷嘴,且喷嘴与消防材料存储发射模块相连,所述双光云台上设有可见光相机和红外相机。
5.前述的一种智能机器人的消防装置中,所述消防材料存储发射模块包括位于机器人底盘上的消防罐,消防罐输出口设有电磁阀、压力传感器和软管,所述软管与喷嘴相连。
6.前述的一种智能机器人的消防装置中,所述消防材料存储发射模块包括位于机器人底盘上方左右两侧的消防箱,每个消防箱的上方均设有进水管,两个消防箱的后侧经连接水管相连,其中一个消防箱的后侧经第一管道连接有增压泵,增压泵经第二管道与喷嘴相连。
7.前述的一种智能机器人的消防装置中,所述消防箱内还设有多块并列分布的加强分隔板。
8.前述的一种智能机器人的消防装置中,所述加强分隔板包括板体,板体中部设有流通孔,板体上下两端设有流通槽,板体的侧面还设有加强筋。
9.前述的一种智能机器人的消防装置中,主控模块还连接有无线通讯模块和io控制盒。
10.与现有技术相比,本实用新型由主控模块、消防材料存储发射模块、双轴云台和喷嘴、双光云台、可见光相机和红外相机组成,利用可见光相机和红外相机采集火源目标数据,利用双轴云台转动来调整喷嘴的位置,主控模块通过控制消防材料存储发射模块、双轴云台和喷头对火源位置处的喷射,从而可以实现将火源消灭处置的目的,能够提高灭火的效率。综上所述,本实用新型具有能够对火源进行有效的打击处理的特点。
附图说明
11.图1是本实用新型实施例1的结构示意图;
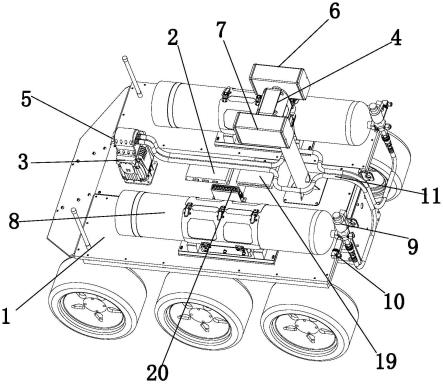
12.图2是本实用新型实施例2的结构视图;
13.图3是消防箱的剖视图;
14.图4是加强分隔板的结构视图。
15.附图中的标记为:1-机器人底盘,2-主控模块,3-双轴云台,4-双光云台,5-喷嘴,6-可见光相机,7-红外相机,8-消防罐,9-电磁阀,10-压力传感器,11-软管,12-消防箱,13-进水管,14-连接水管,15-第一管道,16-增压泵,17-第二管道,18-加强分隔板,181-板体,182-流通孔,183-流通槽,184-加强筋,19-无线通讯模块,20-io控制盒。
具体实施方式
16.下面结合附图和实施例对本实用新型作进一步的说明,但并不作为对本实用新型限制的依据。
17.实施例1。一种智能机器人的消防装置,构成如图1所示,包括设置在机器人底盘1上的主控模块2和消防材料存储发射模块;机器人底盘1的前后两端分别设有双轴云台3和双光云台4,双轴云台3上设有喷嘴5,且喷嘴5与消防材料存储发射模块相连,所述双光云台4上设有可见光相机6和红外相机7。
18.智能机器人的设备舱室外还设有接线检修箱,接线检修箱的上方设有可拆卸检修盖,接线检修箱的侧面设有多个防水插件,接线检修箱内设有供电分线盒、交换机、通讯模块。增加接线检修箱转接可以减少防水插件占据的上表面空间,提高空间利用率;降低防水密封失效的风险。
19.所述消防材料存储发射模块包括位于机器人底盘1上的消防罐8,消防罐8输出口设有电磁阀9、压力传感器10和软管11,所述软管11与喷嘴5相连。
20.主控模块2还连接有无线通讯模块19和io控制盒20。
21.主控模块2还连接有后台服务器和监控界面等部分。
22.主控模块:用于控制机器人的行走和双轴云台转动;采集消防罐压力传感器和红外相机、可见光相机等传感器的数据;通过通讯模块与后台服务器进行数据交换;控制io控制盒驱动电磁阀开关,打开消防罐,通过不锈钢软管和喷头进行消防液的喷射;
23.无线通讯模块:通讯模块包含主机和wifi天线;通讯方式采用wifi模式组网,使主控模块与后台服务器进行数据交换;
24.传感器:包含压力传感器、红外相机和可见光相机,压力传感器实时监控消防罐的压力状态;红外相机和可见光相机,用于检测火源和环境监控;
25.io控制盒:与主控模块通过信号交互,控制电磁阀的开关;
26.双轴云台:为喷头调整方位和俯仰角度,瞄准火源目标,进行消防液喷射;
27.电磁阀:开启消防罐喷出消防液;
28.消防罐:装载消防液体的容器;
29.喷嘴不锈钢喷头:用于将消防罐的消防液喷出;
30.软管不锈钢软管:用于将消防罐中的消防液输送到喷嘴;
31.后台服务器:用于监控数据存储和交互;
32.监控界面:监控系统的状态,消防罐喷射的人工交互确认。
33.在智能机器人的搭载的红外相机传感器发现温度异常和突发火情时,智能机器人搭载的双轴云台调整喷头角度瞄准火源;将火源点信息立即传回后台服务器的监控界面进行预警,后台监控人员根据传回信息进行人工确认后,然后下达灭火处置指令,主控模块驱动io控制盒将电磁阀打开,消防罐的消防液通过不锈钢软管和喷头对火源进行摆扫喷射,火源处置完成后关闭电磁阀,结束火情处置任务。
34.系统工作流程步骤如下:
35.第一步:智能机器人消防罐的灭火控制系统对搭载的双轴云台、红外相机、可见光相机及压力传感器的状态进行自检,对io控制盒和无线通讯模块进行数据协议通讯检测,判断智能机器人消防罐的灭火控制系统状态的完好性;
36.第二步:智能机器人按预设的检测轨迹进行任务火源巡检;通过搭载的红外相机和可见光相机等传感器对道路两侧的热源目标进行数据采集;
37.第三步:智能机器人的主控模块利用红外成像原理,采用图像深度处理技术,训练建模,超出温度设定范围即报警,从而对热源进行识别和锁定;
38.第四步:主控模块对热源锁定后,获取热源的位置三维空间坐标,通过控制双轴云台的俯仰和方位角度,对火源目标的三维坐标与双轴云台的角度进行转换和补偿,使不锈钢喷头初始对准火源目标;实现火源定位并自动瞄准。
39.第五步:主控模块通过无线通讯模块将火源警告信息上传到后台服务器的监控界面,进行警情数据上报;
40.第六步:人工确认后,无线通讯模块将监控界面的控制指令发送到主控模块,主控模块接收后驱动io控制盒;
41.第七步:主控模块接收后到控制指令,与io控制盒进行数据通讯,发送脉冲控制信号驱动电磁阀打开消防罐;
42.第八步:根据火源点目标的位置信息,主控模块通过pid算法调整双轴云台的航向角度和俯仰角度,以5
°
/s的速率进行左右和上下摆扫,对火源目标进行灭火;
43.第九步:根据火源的灭火情况,主控模块在消防罐的消防液喷射完毕后或后台指令关闭消防罐的条件下,关闭电磁阀;
44.第十步:智能机器人消防罐的灭火控制系统灭火结束后,智能机器人后退至安全区域,任务巡检结束。
45.实施例2。一种智能机器人的消防装置,构成如图2-4所示,包括设置在机器人底盘1上的主控模块2和消防材料存储发射模块;机器人底盘1的前后两端分别设有双轴云台3和双光云台4,双轴云台3上设有喷嘴5,且喷嘴5与消防材料存储发射模块相连,所述双光云台4上设有可见光相机6和红外相机7。
46.所述消防材料存储发射模块包括位于机器人底盘1上方左右两侧的消防箱12,每个消防箱12的上方均设有进水管13,两个消防箱12的后侧经连接水管14相连,其中一个消防箱12的后侧经第一管道15连接有增压泵16,增压泵16经第二管道17与喷嘴5相连。
47.采用消防箱,可以方便消防液的及时补充,在补充消防液时无需拆除装置外壳。
48.所述消防箱12内还设有多块并列分布的加强分隔板18。设置加强分隔板的目的,一方面可以提高消防箱的结构强度,另一方面还能够防止箱体内的液体发生晃动,提高运
行的稳定性。
49.所述加强分隔板18包括板体181,板体181中部设有流通孔182,板体181上下两端设有流通槽183,板体181的侧面还设有加强筋184。
50.主控模块2还连接有无线通讯模块19、io控制盒20和固态继电器。
51.消防箱内还设有液位传感器和水位开关。
52.主控模块:用于控制机器人的行走和双轴云台转动;采集消防水箱的液位传感器和红外相机、可见光相机等传感器的数据;通过通讯模块与后台服务器进行数据交换;控制io控制盒驱动固态继电器,打开压力泵,将水箱的消防液抽出增压后,通过不锈钢软管和喷头进行消防液的喷射;
53.通讯模块:通讯模块包含主机和wifi天线;通讯方式采用wifi模式组网,使主控模块与后台服务器进行数据交换;
54.传感器:包含液位传感器、水位开关、红外相机和可见光相机,液位传感器实时监控消防水箱的水位状态;水位开关用于注水时,达到注水高度后自动关闭注水阀;红外相机和可见光相机,用于检测火源和环境监控;
55.io控制盒:与主控模块通过信号交互,控制固态继电器和水位开关;
56.双轴云台:为喷头调整方位和俯仰角度,瞄准火源目标,进行消防液喷射;
57.固态继电器:开启增压泵,抽取消防液和增压;
58.消防箱:装载消防液体的容器;
59.增压泵:将水箱的消防液抽出,通过涡轮增加压力,提升消防液喷射距离;
60.喷嘴(不锈钢喷头):用于将消防箱的消防液喷出;
61.后台服务器:用于监控数据存储和交互;
62.监控界面:监控系统的状态,消防水箱喷射的人工交互确认。
63.在智能机器人的搭载的红外相机传感器发现温度异常和突发火情时,智能机器人搭载的双轴云台调整喷头角度瞄准火源;将火源点信息立即传回后台服务器的监控界面进行预警,后台监控人员根据传回信息进行人工确认后,然后下达灭火处置指令,主控模块驱动io控制盒将固态继电器打开,启动增压泵,将消防液抽出增压后,通过不锈钢软管和喷头对火源进行摆扫喷射,火源处置完成后关闭固态继电器,结束火情处置任务。
64.系统工作流程步骤如下:
65.第一步:智能机器人消防水箱的灭火控制系统对搭载的双轴云台、红外相机、可见光相机及液位传感器的状态进行自检,对io控制盒和无线通讯模块进行数据协议通讯检测,判断智能机器人消防水箱的灭火控制系统状态的完好性;
66.第二步:智能机器人按预设的检测轨迹进行任务火源巡检;通过搭载的红外相机和可见光相机等传感器对道路两侧的热源目标进行数据采集;
67.第三步:智能机器人的主控模块利用红外成像原理,采用图像深度处理技术,训练建模,超出温度设定范围即报警,从而对热源进行识别和锁定;
68.第四步:主控模块对热源锁定后,获取热源的位置三维空间坐标,通过控制双轴云台的俯仰和方位角度,对火源目标的三维坐标与双轴云台的角度进行转换和补偿,使不锈钢喷头初始对准火源目标;实现火源定位并自动瞄准;
69.第五步:主控模块通过无线通讯模块将火源警告信息上传到后台服务器的监控界
面,进行警情数据上报;
70.第六步:人工确认后,无线通讯模块将监控界面的控制指令发送到主控模块,主控模块接收后驱动io控制盒;
71.第七步:主控模块接收后到控制指令,与io控制盒进行数据通讯,发送脉冲控制信号驱动固态继电器,启动增压泵;
72.第八步:固态继电器收到io驱动盒的直流信号为高电平,控制打开动力电源,启动增压泵;将消防液抽出增压喷射;
73.第九步:根据火源点目标的位置信息,主控模块通过pid算法调整双轴云台的航向角度和俯仰角度,以5
°
/s的速率进行左右和上下摆扫,对火源目标进行灭火;
74.第十步:根据火源的灭火效果及液位传感器的水位情况,主控模块根据消防箱的消防液的液位报警信号自动关闭固态继电器,或收到后台指令后关闭固态继电器;
75.第十一步:固态继电器收到io驱动盒的直流信号为低电平,控制关闭动力电源,增压泵停止工作;停止从消防箱抽出消防液;
76.第十二步:智能机器人消防水箱的灭火控制系统灭火结束后,智能机器人后退至安全区域,任务巡检结束。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1