一种消防机器人清障机构的制作方法
1.本实用新型涉及消防机器人技术领域,具体为一种消防机器人清障机构。
背景技术:
2.消防机器人是特种机器人的一种,在灭火和抢险救援中愈加发挥举足轻重的作用,消防机器人能代替消防救援人员进入易燃易爆、有毒、缺氧、浓烟等危险灾害事故现场进行数据采集、处理、反馈,有效地解决消防人员在上述场所面临的人身安全、数据信息采集不足等问题。
3.现有的技术在障碍物较多的路面行走时,不便于将消防机器人前方路面的障碍物清理到不妨碍消防机器人行走的位置,从而容易影响消防机器人的移动,在不需要清障的路面行走时,不便于快速的将清障结构从消防机器人上拆卸下来,使得增大了消防机器人的负重,从而增大了能源的消耗,为此,我们提出一种消防机器人清障机构。
技术实现要素:
4.本实用新型要解决的技术问题是克服现有的缺陷,提供一种消防机器人清障机构,在障碍物较多的路面行走时,可以方便的将消防机器人前方路面的障碍物清理到不妨碍消防机器人行走的位置,避免影响消防机器人的移动,在不需要清障的路面行走时,可以方便的将清障结构从消防机器人上拆卸下来,减小消防机器人的负重,从而间接减小能源的消耗,可以有效解决背景技术中的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种消防机器人清障机构,包括矩形底板、安装单元和清障单元;
6.矩形底板:的一端侧面与半圆底板的一端侧面固定连接;
7.安装单元:包含螺杆、滑柱一、十字形凸块、矩形夹紧板、竖直支撑板和滑动块,所述矩形底板的另一端上表面的两端分别与两个对应配合的竖直支撑板的下端固定连接,两个竖直支撑板的侧面上下端分别与两个对应配合的滑柱一的两端侧面固定连接,两个滑柱一的两端侧面分别与两个对应配合的滑动块的侧面上下端滑动连接,两个竖直支撑板的侧面中部分别与螺杆的两端侧面转动连接,所述螺杆的两端侧面螺纹方向相反,且螺杆的两端侧面分别与两个滑动块的侧面中部螺纹连接,两个滑动块的侧面中部分别与两个对应配合的矩形夹紧板的一端侧面固定连接,两个矩形夹紧板的侧面分别设置有两个对应配合的十字形凸块;
8.清障单元:安装在半圆底板的上表面边缘位置。
9.矩形底板与半圆底板均起到支撑固定的作用,当需要将消防机器人需要进行清障时,转动螺杆,带动两个滑动块沿着滑柱一向着相互靠近的方向滑动,两个滑动块带动矩形夹紧板移动,矩形夹紧板带动十字形凸块移动,当十字形凸块移动到一定程度后,十字形凸块进入到消防机器人上预先开设的十字形凹槽中,从而使得将其安装在消防机器人上,竖直支撑板用于支撑滑柱一,清障单元使得可以方便将消防机器人前方影响行走的障碍物清
理到不妨碍行走的位置,从而使得消防机器人能够正常的向前行走,避免耽误救援火情。
10.进一步的,所述安装单元还包含转盘,所述螺杆的一端侧面与转盘的侧面中心位置固定连接。转动转盘带动螺杆转动,转盘增大了螺杆的转动半径,使得转动时更加轻松。
11.进一步的,所述安装单元还包含防滑槽,所述转盘的一周侧面等角度均匀开设有五个防滑槽。防滑槽可以防止转动转盘时手滑。
12.进一步的,所述清障单元包含轴承、传动皮带、电机、弧形挡板、旋转轴、传动轮一、转动支撑板、传动轮二、限位块、滑柱二、弹簧和清障板,所述半圆底板的上表面边缘位置与弧形挡板的下端固定连接,所述半圆底板的上表面中心位置通过轴承与旋转轴的下端固定连接,所述旋转轴的中部侧面与传动轮一的上表面中心位置固定连接,所述半圆底板的上表面偏心位置与电机的下表面固定连接,所述电机的输出轴与传动轮二的下表面固定连接,所述传动皮带的一端内部侧面与传动轮一的侧面摩擦连接,所述传动皮带的另一端内部侧面与传动轮二的侧面摩擦连接,所述旋转轴的上端与转动支撑板的一端下表面固定连接,所述转动支撑板的下表面中部与弧形挡板的上端摩擦连接,所述转动支撑板的另一端上表面与两个对应配合的滑柱二的中部侧面竖直滑动了,两个滑柱二的下端分别与清障板的上表面两端固定连接,两个滑柱二的上端分别与两个限位块的下表面中心位置固定连接,两个滑柱二处于转动支撑板与清障板之间的部分分别活动套接有弹簧,所述电机的输入端与外部控制开关组的输出端电连接。当需要清理前方的障碍物时,打开控制电机的外部控制开关组,电机工作,电机的输出轴带动传动轮二转动,传动轮二带动传动皮带移动,传动皮带带动传动轮一转动,传动轮一带动旋转轴绕着轴承转动,旋转轴带动转动支撑板转动,转动支撑板带动滑柱二移动,滑柱二带动清障板移动,清障板在弹簧的作用下紧贴在地面上,使得清障板推动障碍物移动,从而使得前方路面上的障碍物清理走,使得障碍物不妨碍消防机器人的移动,弧形挡板使得可以遮挡障碍物,限位块可以防止滑柱二脱落。
13.进一步的,所述清障单元还包含矩形防脱块,所述传动轮一与传动轮二的上下表面分别等角度均匀设置有矩形防脱块。矩形防脱块可以防止传动皮带从传动轮一与传动轮二上脱落。
14.进一步的,所述清障单元还包含矩形支撑块、弧形滑轨和圆形滑块,所述弧形挡板的上表面两端分别与两个对应配合的矩形支撑块的下端固定连接,两个矩形支撑块的上端分别与弧形滑轨的下表面两端固定连接,所述转动支撑板的上表面中部与圆形滑块的下端固定连接,所述圆形滑块的侧面与弧形滑轨的内部侧面滑动连接。转动支撑板还带动圆形滑块沿着弧形滑轨滑动,从而使得转动支撑板转动时更加稳定,矩形支撑块用于支撑弧形滑轨。
15.与现有技术相比,本实用新型的有益效果是:本消防机器人清障机构,具有以下好处:
16.1、本消防机器人清障机构设置的安装单元使得可以将其方便快速的安装在消防机器人上,还可以在需要拆卸时方便的将其从消防机器人上拆卸下来。
17.2、本消防机器人清障机构设置的清障单元使得可以方便将消防机器人前方影响行走的障碍物清理到不妨碍行走的位置,从而使得消防机器人能够正常的向前行走,避免耽误救援火情。
18.3、本消防机器人清障机构在障碍物较多的路面行走时,可以方便的将消防机器人
前方路面的障碍物清理到不妨碍消防机器人行走的位置,避免影响消防机器人的移动,在不需要清障的路面行走时,可以方便的将清障结构从消防机器人上拆卸下来,减小消防机器人的负重,从而间接减小能源的消耗。
附图说明
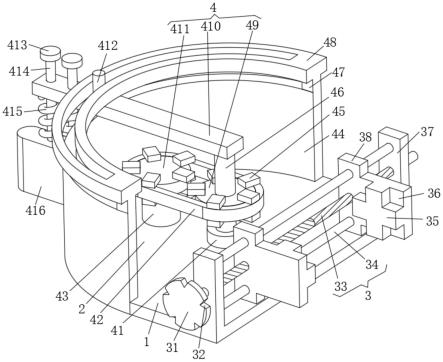
19.图1为本实用新型结构示意图。
20.图2为本实用新型前侧结构示意图。
21.图3为本实用新型上端结构示意图。
22.图中:1矩形底板、2半圆底板、3安装单元、31转盘、32防滑槽、33螺杆、34滑柱一、35十字形凸块、36矩形夹紧板、37竖直支撑板、38滑动块、4清障单元、41轴承、42传动皮带、43电机、44弧形挡板、45矩形防脱块、46旋转轴、47矩形支撑块、48弧形滑轨、49传动轮一、410转动支撑板、411传动轮二、412圆形滑块、413限位块、414滑柱二、415弹簧、416清障板。
具体实施方式
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
24.请参阅图1-3,本实施例提供一种技术方案:一种消防机器人清障机构,包括矩形底板1、安装单元3和清障单元4;
25.矩形底板1:的一端侧面与半圆底板2的一端侧面固定连接;
26.安装单元3:包含螺杆33、滑柱一34、十字形凸块35、矩形夹紧板36、竖直支撑板37和滑动块38,矩形底板1的另一端上表面的两端分别与两个对应配合的竖直支撑板37的下端固定连接,两个竖直支撑板37的侧面上下端分别与两个对应配合的滑柱一34的两端侧面固定连接,两个滑柱一34的两端侧面分别与两个对应配合的滑动块38的侧面上下端滑动连接,两个竖直支撑板37的侧面中部分别与螺杆33的两端侧面转动连接,螺杆33的两端侧面螺纹方向相反,且螺杆33的两端侧面分别与两个滑动块38的侧面中部螺纹连接,两个滑动块38的侧面中部分别与两个对应配合的矩形夹紧板36的一端侧面固定连接,两个矩形夹紧板36的侧面分别设置有两个对应配合的十字形凸块35;
27.安装单元3还包含转盘31,螺杆33的一端侧面与转盘31的侧面中心位置固定连接。转动转盘31带动螺杆33转动,转盘31增大了螺杆33的转动半径,使得转动时更加轻松。
28.安装单元3还包含防滑槽32,转盘31的一周侧面等角度均匀开设有五个防滑槽32。防滑槽32可以防止转动转盘31时手滑。
29.清障单元4:安装在半圆底板2的上表面边缘位置。
30.清障单元4包含轴承41、传动皮带42、电机43、弧形挡板44、旋转轴46、传动轮一49、转动支撑板410、传动轮二411、限位块413、滑柱二414、弹簧415和清障板416,半圆底板2的上表面边缘位置与弧形挡板44的下端固定连接,半圆底板2的上表面中心位置通过轴承41与旋转轴46的下端固定连接,旋转轴46的中部侧面与传动轮一49的上表面中心位置固定连接,半圆底板2的上表面偏心位置与电机43的下表面固定连接,电机43的输出轴与传动轮二
411的下表面固定连接,传动皮带42的一端内部侧面与传动轮一49的侧面摩擦连接,传动皮带42的另一端内部侧面与传动轮二411的侧面摩擦连接,旋转轴46的上端与转动支撑板410的一端下表面固定连接,转动支撑板410的下表面中部与弧形挡板44的上端摩擦连接,转动支撑板410的另一端上表面与两个对应配合的滑柱二414的中部侧面竖直滑动了,两个滑柱二414的下端分别与清障板416的上表面两端固定连接,两个滑柱二414的上端分别与两个限位块413的下表面中心位置固定连接,两个滑柱二414处于转动支撑板410与清障板416之间的部分分别活动套接有弹簧415,电机43的输入端与外部控制开关组的输出端电连接。当需要清理前方的障碍物时,打开控制电机43的外部控制开关组,电机43工作,电机43的输出轴带动传动轮二411转动,传动轮二411带动传动皮带42移动,传动皮带42带动传动轮一49转动,传动轮一49带动旋转轴46绕着轴承41转动,旋转轴46带动转动支撑板410转动,转动支撑板410带动滑柱二414移动,滑柱二414带动清障板416移动,清障板416在弹簧415的作用下紧贴在地面上,使得清障板416推动障碍物移动,从而使得前方路面上的障碍物清理走,使得障碍物不妨碍消防机器人的移动,弧形挡板44使得可以遮挡障碍物,限位块413可以防止滑柱二414脱落。
31.清障单元4还包含矩形防脱块45,传动轮一49与传动轮二411的上下表面分别等角度均匀设置有矩形防脱块45。矩形防脱块45可以防止传动皮带42从传动轮一49与传动轮二411上脱落。
32.清障单元4还包含矩形支撑块47、弧形滑轨48和圆形滑块412,弧形挡板44的上表面两端分别与两个对应配合的矩形支撑块47的下端固定连接,两个矩形支撑块47的上端分别与弧形滑轨48的下表面两端固定连接,转动支撑板410的上表面中部与圆形滑块412的下端固定连接,圆形滑块412的侧面与弧形滑轨48的内部侧面滑动连接。转动支撑板410还带动圆形滑块412沿着弧形滑轨48滑动,从而使得转动支撑板410转动时更加稳定,矩形支撑块47用于支撑弧形滑轨48。
33.矩形底板1与半圆底板2均起到支撑固定的作用,当需要将消防机器人需要进行清障时,转动螺杆33,带动两个滑动块38沿着滑柱一34向着相互靠近的方向滑动,两个滑动块38带动矩形夹紧板36移动,矩形夹紧板36带动十字形凸块35移动,当十字形凸块35移动到一定程度后,十字形凸块35进入到消防机器人上预先开设的十字形凹槽中,从而使得将其安装在消防机器人上,竖直支撑板37用于支撑滑柱一34,清障单元4使得可以方便将消防机器人前方影响行走的障碍物清理到不妨碍行走的位置,从而使得消防机器人能够正常的向前行走,避免耽误救援火情。
34.本实用新型提供的一种消防机器人清障机构的工作原理如下:
35.当需要将消防机器人需要进行清障时,转动转盘31带动螺杆33转动,螺杆33带动两个滑动块38沿着滑柱一34向着相互靠近的方向滑动,两个滑动块38带动矩形夹紧板36移动,矩形夹紧板36带动十字形凸块35移动,当十字形凸块35移动到一定程度后,十字形凸块35进入到消防机器人上预先开设的十字形凹槽中,从而使得将其安装在消防机器人上,当需要清理前方的障碍物时,打开控制电机43的外部控制开关组,电机43工作,电机43的输出轴带动传动轮二411转动,传动轮二411带动传动皮带42移动,传动皮带42带动传动轮一49转动,传动轮一49带动旋转轴46绕着轴承41转动,旋转轴46带动转动支撑板410转动,转动支撑板410带动滑柱二414移动,滑柱二414带动清障板416移动,清障板416在弹簧415的作
用下紧贴在地面上,使得清障板416推动障碍物移动,从而使得前方路面上的障碍物清理走,使得障碍物不妨碍消防机器人的移动,转动支撑板410还带动圆形滑块412沿着弧形滑轨48滑动,从而使得转动支撑板410转动时更加稳定。
36.值得注意的是,以上实施例中所公开的外部控制开关组核心芯片选用的是plc单片机,电机43则可根据实际应用场景自由配置,建议电机43选用永磁同步电机。外部控制开关组控制电机43工作采用现有技术中常用的方法。
37.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1