一种消防设备及其臂架控制方法、电子设备及存储介质与流程
本技术涉及自动控制,特别是涉及一种消防设备及其臂架控制方法、电子设备及存储介质。
背景技术:
1、高层建筑、石油化工等各类火灾情况会造成极为严重的生命危害以及经济损失。在灭火救援工作中,消防装备能够快速、精准、高效地控制臂架进行灭火救援显得尤为重要。
2、目前,主要是通过机手遥控操作或者一键展臂功能对消防装备的臂架进行控制,机手遥控操作效率较低且过分依赖于机手主观意识,一键展臂功能的展臂位置固定化,无法很好达到理想的灭火姿态。可见,现有的臂架控制方式的精准度及效率问题仍亟待解决。
技术实现思路
1、有鉴于此,本技术的目的在于提供一种消防设备及其臂架控制方法、电子设备及存储介质,基于火点信息、灭火装置的工作参数以及预先训练的臂架动作模型获取臂架末端的目标位姿,无需人工参与即可进行精准、高效的自适应臂架控制,获得最优灭火姿态。
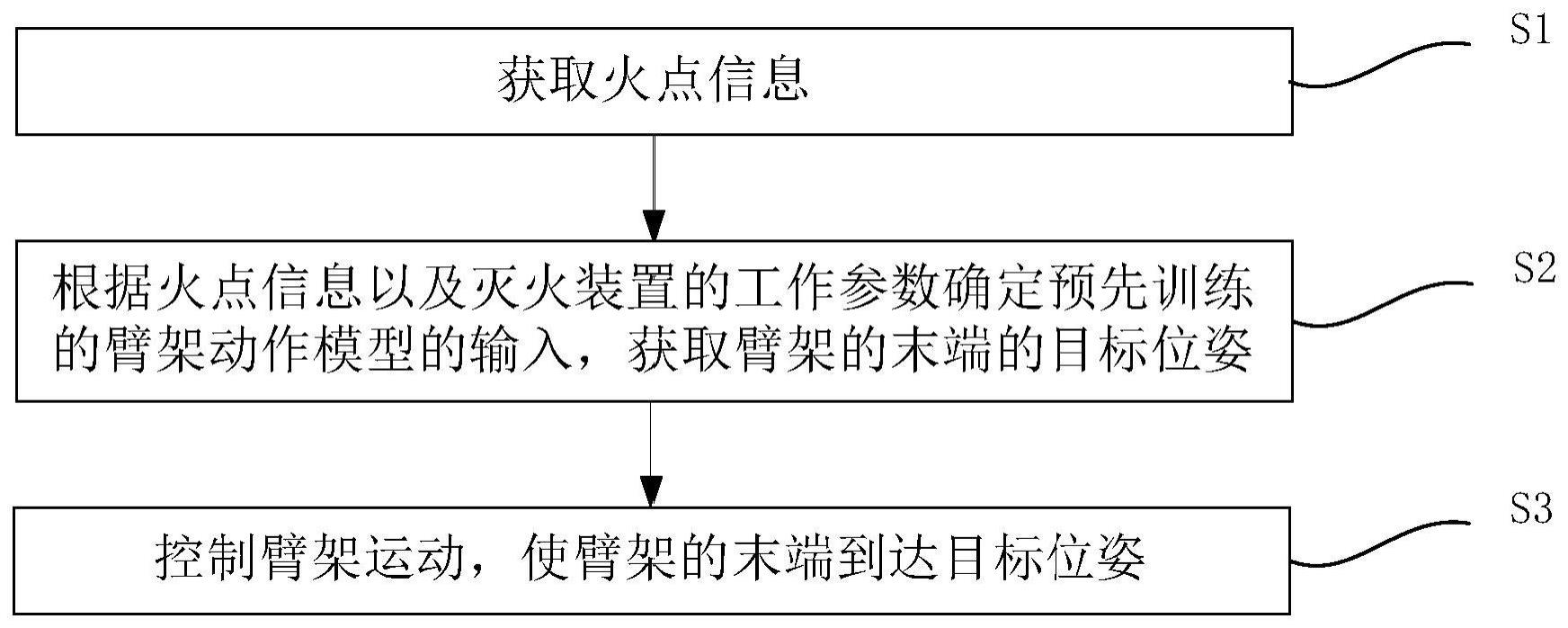
2、为达到上述目的,本技术提供一种消防设备的臂架控制方法,所述消防设备包括臂架与设置在所述臂架的末端的灭火装置,所述方法包括:
3、获取火点信息;
4、根据所述火点信息以及所述灭火装置的工作参数确定预先训练的臂架动作模型的输入,获取所述臂架的末端的目标位姿;
5、控制所述臂架运动,使所述臂架的末端到达所述目标位姿。
6、在一个实施例中,所述获取火点信息,包括:
7、控制无人机系统按照预设轨迹飞行,并开启所述无人机系统的探测装置以探测火点,所述无人机系统的与所述消防设备通信连接;
8、当所述无人机系统探测到火点时,基于所述无人机系统获取所述火点信息。
9、在一个实施例中,当所述无人机系统探测到火点时,基于所述无人机系统获取所述火点信息,包括:
10、当所述无人机系统探测到火点时,跟踪所述火点直至所述火点位于所述探测装置的视野中心;
11、确定所述火点与所述无人机系统的第一相对位置以及所述无人机系统与所述消防设备的第二相对位置;
12、根据所述探测装置采集的图像、所述第一相对位置以及所述第二相对位置获取所述火点信息。
13、在一个实施例中,所述根据所述火点信息以及所述灭火装置的工作参数确定预先训练的臂架动作模型的输入,获取所述臂架的末端的目标位姿,包括:
14、根据所述火点信息以及所述灭火装置的工作参数确定预先训练的臂架动作模型的输入,并获取所述臂架动作模型输出的所述臂架的末端的目标高度;
15、根据所述火点信息与所述目标高度确定获取所述臂架的末端的目标位姿。
16、在一个实施例中,所述火点信息包括火点位置与火点面积;
17、所述根据所述火点信息以及所述灭火装置的工作参数确定预先训练的臂架动作模型的输入,包括:
18、根据所述火点面积确定目标射流落点面积;
19、根据所述火点位置确定目标射流落点距离;
20、获取所述灭火装置的工作参数中的炮口压力;
21、将所述目标射流落点面积、所述目标射流落点距离以及所述炮口压力输入所述臂架动作模型。
22、在一个实施例中,所述方法还包括:
23、创建ddpg模型,所述ddpg模型包括actor网络与critic网络;
24、通过所述actor网络与环境进行互动,确定所述臂架在第一状态采取第一动作到达的第二状态及所得到的奖励值,所述奖励值使用的预设奖惩策略包括关联于射流落点面积与目标面积之间的偏差、射流落点距离与目标距离之间的偏差的奖惩机制;
25、将所述第一状态、所述第一动作、所述奖励值及所述第二状态存储于训练数据库;
26、基于所述训练数据库对actor网络、critic网络进行训练,得到训练后的臂架动作模型。
27、在一个实施例中,所述通过所述actor网络与环境进行互动,确定所述臂架在第一状态采取第一动作到达的第二状态及所得到的奖励值,包括:
28、通过所述actor网络与环境进行互动,确定所述臂架在第一状态采取第一动作到达的第二状态;
29、根据所述第二状态的环境反馈,确定预测的射流落点面积与预测的射流落点距离;
30、根据所述预设奖惩策略确定奖励值,所述预设奖惩策略为:
31、reward=r1+r2,
32、其中,reward为所述奖励值;r1为所述预测的射流落点面积与目标射流落点面积之间的偏差关联的奖惩值;r2为所述预测的射流落点距离与目标射流落点距离之间的偏差关联的奖惩值。
33、在一个实施例中,所述火点信息包括火点位置,所述根据所述火点信息与所述目标高度确定所述臂架的末端的目标位姿,包括:
34、根据所述火点位置确定所述臂架的末端的回转角度与幅度;
35、根据所述臂架的末端的回转角度、幅度以及所述目标高度,确定所述臂架的末端的目标位姿。
36、在一个实施例中,所述控制所述臂架运动,使所述臂架的末端到达所述目标位姿,包括:
37、判断所述目标位姿是否在所述臂架的末端的可执行位置范围内;
38、若所述目标位姿在所述臂架的末端的可执行位置范围内,则控制所述臂架运动,以使所述臂架的末端到达所述目标位姿;
39、若所述目标位姿不在所述臂架的末端的可执行位置范围内,则根据所述臂架的末端的可执行位置范围确定所述目标位姿的相邻位姿,控制所述臂架运动,以使所述臂架的末端到达所述相邻位姿。
40、本技术还提供一种消防设备,所述消防设备包括臂架、控制装置以及设置在所述臂架的末端的灭火装置,所述控制装置被配置成用于:
41、获取火点信息;
42、根据所述火点信息以及所述灭火装置的工作参数确定预先训练的臂架动作模型的输入,获取所述臂架的末端的目标位姿;
43、控制所述臂架运动,使所述臂架的末端到达所述目标位姿。
44、在一个实施例中,所述消防设备还包括无人机系统,所述无人机系统与所述消防设备通信连接;
45、所述无人机系统包括探测装置与测距装置,所述探测装置用于探测火点,所述测距装置用于获取所述火点与所述无人机系统的相对位置。
46、本技术还提供一种电子设备,包括处理器、存储器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现如上任一所述的方法的步骤。
47、本技术还提供一种计算机可读存储介质,所述计算机可读存储介质上存储计算机程序,所述计算机程序被处理器执行时实现如上任一所述的方法的步骤。
48、由上述,本技术的消防设备及其臂架控制方法、电子设备及存储介质,消防设备包括臂架与设置在臂架末端的灭火装置,控制方法包括:获取火点信息;根据火点信息以及灭火装置的工作参数确定预先训练的臂架动作模型的输入,获取臂架末端的目标位姿;控制臂架运动,使臂架末端到达目标位姿。本技术的技术方案,在确定火点信息与灭火装置的工作参数后,基于预先训练的臂架动作模型获取臂架末端的目标位姿,使臂架末端的位姿与火点信息和灭火装置的工作参数相关联,无需人工参与即可进行快速、精准、高效的自适应臂架控制,获得最优灭火姿态。
- 还没有人留言评论。精彩留言会获得点赞!