轨道交通智能火警安全控制方法及控制系统与流程
本发明涉及轨道交通安全领域,尤其涉及轨道交通智能火警安全控制方法及控制系统。
背景技术:
1、由于轨道车长期行驶,其车体内渗入较多的灰尘,而电气柜需要保证长期运行,并且其因为散热需求,需要保证内外气流的流通,这就导致电气柜或者车厢内部存在以下问题:
2、1、由于内外气流的流通,灰尘极易跟随气流进入电器柜内部,这种情况会导致火焰探测器的外表面附着较多灰尘,导致火焰探测器检测灵敏度降低,进而导致误报的情况发生。
3、2、由于现有设计中的灭火系统通常是采用动力瓶组与灭火剂瓶组之间的配合,这种设计在出现火焰探测器误报着火时,动力瓶组会对灭火剂瓶组内部加压,由于加压速度极快,而且动力瓶组的加压过程不可逆,即使系统反应是误报,也无法阻止灭火剂瓶组喷出喷雾。
技术实现思路
1、本发明针对现有技术存在的不足,提供如下技术方案:
2、轨道交通智能火警安全控制方法,包括以下步骤:
3、s1:预设置:设置若干组不同类型的检测组件进行同步监控。
4、s2:初次检测:以最开始检测出空间内存在着火点的检测组件作为初次检测,并以剩余检测组件进行随机顺序排列对着火点进行跟随检测来确定着火点,以避免灰尘覆盖所导致的检测误差。
5、s3:灭火:根据步骤s2的检测结果来对着火点进行相应的灭火操作。
6、作为上述技术方案的改进,所述步骤s1包括以下步骤:
7、s11:通过成像系统拍摄空间内的热图像与全景图像,定位热图像上高温位置与全景图像上的高亮位置,将高温和/或高亮的位置标记为着火点。
8、s12:通过卷积神经网络识别并定位热图像和/或全景图像中的着火点位置。
9、s13:通过火焰检测系统对空间内进行感应检测,并定位着火点的位置。
10、作为上述技术方案的改进,所述步骤s2包括以下步骤:
11、s21:当步骤s11、s12或s13任一项步骤判定存在着火点时,对剩余的检测组件进行顺序的随机排列。
12、s22:根据排列的顺序依次在前一步骤检测的基础上进行图像识别或检测来确定着火点,以避免灰尘覆盖所导致的检测误差。
13、作为上述技术方案的改进,当所述步骤s2的检测结果一致时,则判定检测准确并执行步骤s3,若检测结果不一致时,则执行以下步骤:
14、s201:以若干组检测组件进行随机排列并对步骤s2中判定为着火点的位置进行若干次检测,得到若干组检测结果。
15、s202:若所有检测结果一致,则判定步骤s2中的检测结果准确,并对步骤s2中检测结果不一致的检测组件报故障,等待检修,若所有检测结果存在不一致,则判定步骤s2中检测结果不一致的检测组件存在故障,并执行应急检查。
16、作为上述技术方案的改进,所述应急检查方法包括以下步骤:
17、s203:标记存在检测结果不一致的着火点位置,并对该位置进行报警。
18、s204:将检测结果不一致的着火点区域的全景图像发送至上位机,通过人工判定是否为着火。
19、作为上述技术方案的改进,所述卷积神经网络的训练方法依赖于以下步骤:
20、s121:通过成像系统周期性地拍摄热图像与全景图像。
21、s122:分离热图像与全景图像中无着火点的区域,将该图像区域送入卷积神经网络中进行无着火点的识别训练。
22、s123:将存储有火焰的平面图像与热图像的数据送入卷积神经网络中,对火焰进行识别训练。
23、轨道交通智能火警安全控制系统,采用如前述技术方案中任一项所述的轨道交通智能火警安全控制方法进行控制,包括:若干组检测组件、灭火系统。
24、具体的,若干组检测组件用于以不同的方法来检测空间内的着火点,灭火系统,用于跟随检测组件的检测结果来进行相应的灭火操作。
25、作为上述技术方案的改进,所述检测组件包括:成像系统、卷积神经网络、火焰检测系统。
26、具体的,所述成像系统用于拍摄空间内的热图像与全景图像,并定位热图像上的高温位置与全景图像上的高亮位置,所述卷积神经网络用于识别并定位热图像与全景图像上的着火点位置,所述火焰检测系统用于对空间内进行感应检测,并定位着火点的位置。
27、作为上述技术方案的改进,所述灭火系统包括启动瓶组、灭火剂瓶组以及设置于启动瓶组、灭火剂瓶组之间的连接管路上的缓冲系统。
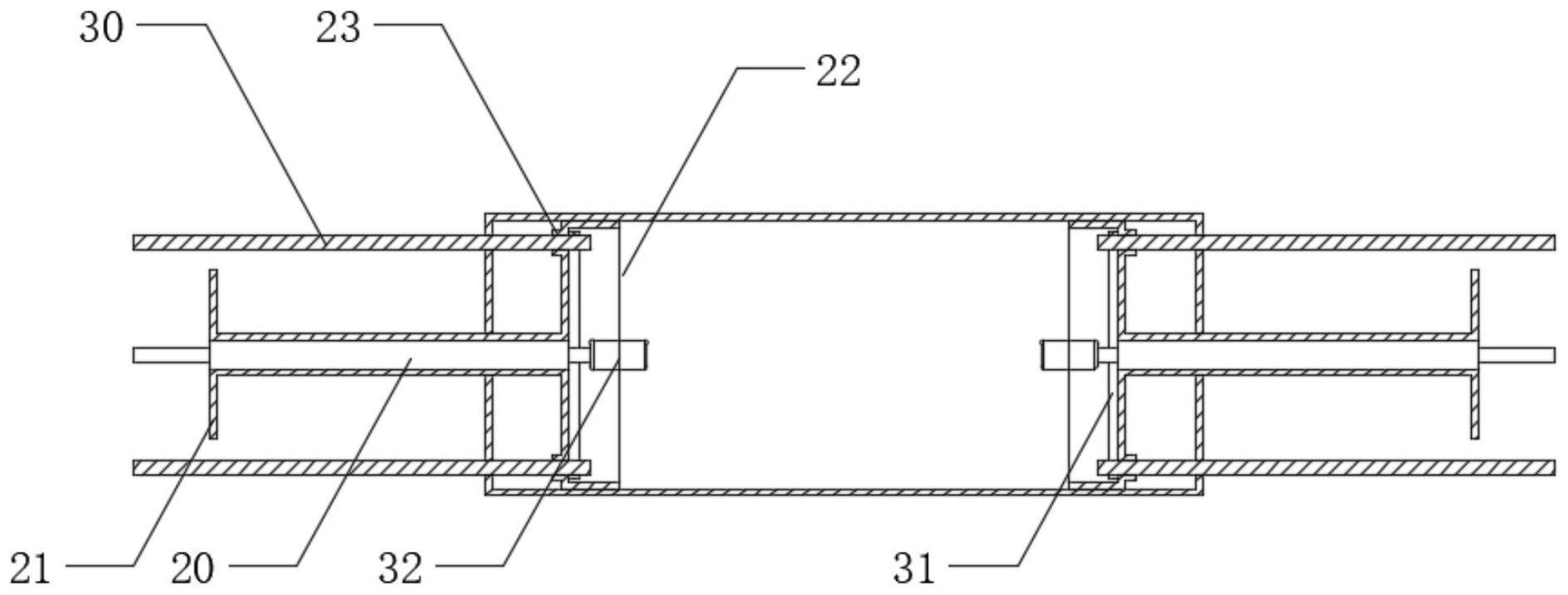
28、作为上述技术方案的改进,所述缓冲系统包括缓冲罐、两组连接管以及两组调节杆,每组所述调节杆为若干个,两组所述连接管分别从缓冲罐的两端穿入缓冲罐内部,所述连接管位于缓冲罐内部的一端设置有贴合缓冲罐内壁的内筒,所述连接管位于缓冲罐外部的一端设置有法兰盘,所述调节杆贯穿缓冲罐与内筒,同侧的若干个所述调节杆之间设置有同步带同步连接,至少一个所述调节杆的端部连接有电机,所述电机固定于内筒的内壁上,所述内筒的内部设置有若干个轴承套,所述调节杆与轴承套的内环固定。
29、本发明的有益效果:
30、通过设置的逐级跟随的检测方式进行检测,这样就保证了每次检测都是在上一次检测的基础上进一步得到的检测结果,实现了逐级多角度验证的方式,这种方式能够在部分结构出现故障检测误判时(例如灰尘覆盖导致部分结构无法准确检测),仍然能够保证火焰检测结果的准确度。
31、并且进一步地还设置缓冲系统,当出现误报时,缓冲系统及时膨胀,吸收部分气压,从而使得启动瓶组所送出的气压无法打开灭火剂瓶组的容器阀,这样能够在出现误报时,提供应急操作,避免错误地打开灭火剂瓶组,进一步降低错误操作的可能性。
技术特征:
1.轨道交通智能火警安全控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的轨道交通智能火警安全控制方法,其特征在于:所述步骤s1包括以下步骤:
3.根据权利要求2所述的轨道交通智能火警安全控制方法,其特征在于:所述步骤s2包括以下步骤:
4.根据权利要求2所述的轨道交通智能火警安全控制方法,其特征在于:当所述步骤s2的检测结果一致时,则判定检测准确并执行步骤s3,若检测结果不一致时,则执行以下步骤:
5.根据权利要求4所述的轨道交通智能火警安全控制方法,其特征在于:所述应急检查方法包括以下步骤:
6.根据权利要求2-5任一项所述的轨道交通智能火警安全控制方法,其特征在于:所述卷积神经网络的训练方法依赖于以下步骤:
7.轨道交通智能火警安全控制系统,采用如权利要求1-6任一项所述的轨道交通智能火警安全控制方法进行控制,其特征在于,包括:
8.根据权利要求7所述的轨道交通智能火警安全控制系统,其特征在于:所述检测组件包括:成像系统、卷积神经网络、火焰检测系统;
9.根据权利要求7所述的轨道交通智能火警安全系统,其特征在于:所述灭火系统包括启动瓶组、灭火剂瓶组以及设置于启动瓶组、灭火剂瓶组之间的连接管路上的缓冲系统。
10.根据权利要求9所述的轨道交通智能火警安全控制系统,其特征在于:所述缓冲系统包括缓冲罐(10)、两组连接管(20)以及两组调节杆(30),每组所述调节杆(30)为若干个;
技术总结
本发明涉及电缆技术领域,尤其涉及轨道交通智能火警安全控制方法及控制系统,其中公开了轨道交通智能火警安全控制方法,包括以下步骤:设置若干组不同类型的检测组件进行同步监控,以最开始检测出空间内存在着火点的检测组件作为初次检测,并以剩余检测组件进行随机顺序排列对着火点进行跟随检测来确定着火点,以避免灰尘覆盖所导致的检测误差,根据步骤S2的检测结果来对着火点进行相应的灭火操作。本发明通过设置的逐级跟随的检测方式进行检测,这样就保证了每次检测都是在上一次检测的基础上进一步得到的检测结果,实现了逐级多角度验证的方式,这种方式能够保证火焰检测结果的准确度。
技术研发人员:闫帅帅,陶富文,闫萱
受保护的技术使用者:安徽中盛轨道交通产业有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!