消防车模拟操控训练装置和方法与流程
本发明涉及虚拟现实和仿真训练,尤其涉及一种消防车模拟操控训练装置和方法。
背景技术:
1、目前,对于消防车操作员的训练,大都通过构建实际场景来实现。该种训练方法费时费力,且训练效果难以得到保证,难以对训练效果进行准确评估。
2、沉浸式虚拟环境、虚拟现实、虚拟仿真、模拟训练,以及进行虚实结合,可以按照一比一的方式构建逼真的仿真场景,并提供逼真的用户体验和操作效果。如何基于虚拟现实技术,构建逼真的消防车模拟训练场景,提高训练效率和效果,是当前急需解决的问题。
技术实现思路
1、针对如何基于虚拟现实技术,构建逼真的消防车模拟训练场景,提高训练效率和效果的问题,本技术公开了一种消防车模拟操控训练装置和方法。
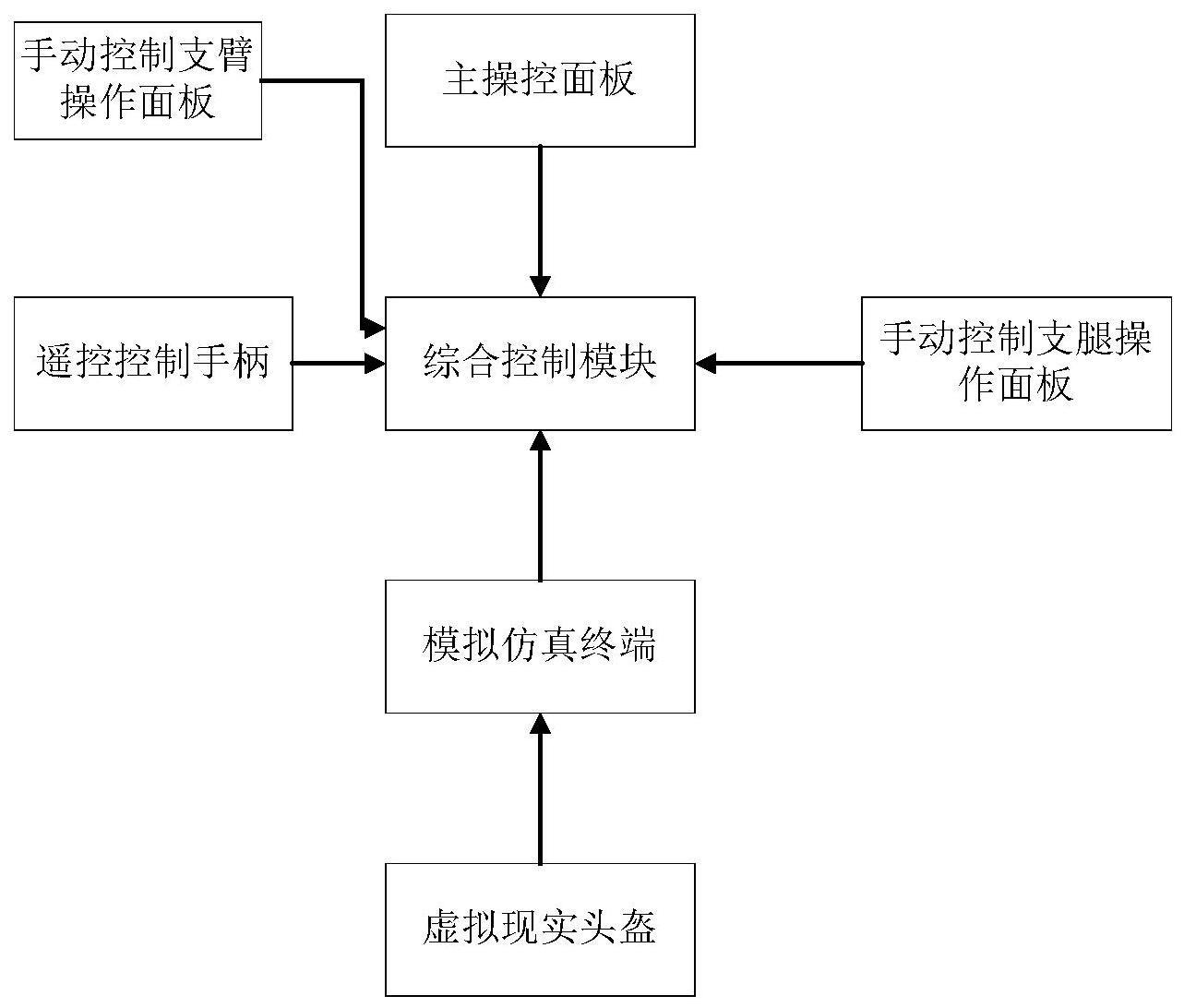
2、一种消防车模拟操控训练装置,其特征在于,包括:支架主体、主操控面板、手动控制支腿操作面板、遥控控制手柄、手动控制支臂操作面板、模拟仿真终端、综合控制模块和虚拟现实头盔;
3、所述支架主体,用于为所述主操控面板、手动控制支腿操作面板、遥控控制手柄、手动控制支臂操作面板、模拟仿真终端和综合控制模块提供安装空间;
4、所述支架主体包括上主体和下主体,所述上主体和下主体,连接在一起;
5、所述主操控面板,安装于所述上主体的中部,用于在进行消防车模拟控制训练时,接收用户对消防车的发动机、电源和水炮的指令信息;
6、所述手动控制支腿操作面板,安装于所述下主体的上端中部,用于在进行消防车模拟控制训练时,接收用户对消防车的支腿的指令信息;
7、所述手动控制支臂控制面板,安装于所述下主体的上端中部,用于在进行消防车模拟控制训练时,接收用户对消防车的支臂的指令信息;
8、所述遥控控制手柄,与综合控制模块连接,用于在进行消防车模拟控制训练时,接收用户对消防车的支臂和支腿的指令信息;
9、所述综合控制模块安装于所述支架主体的内部,用于接收用户预设的消防点信息,以及用户在进行消防车模拟控制训练时对所述主操控面板、手动控制支腿操作面板、遥控控制手柄、手动控制支臂操作面板所发出的第一指令信息集;将所述第一指令集信息和用户预设的消防点信息发送至所述模拟仿真终端;保存每一类消防点信息和对应的操作规范信息;对所述第一指令信息集与用户预设的消防点信息对应的操作规范信息进行比对处理,得到训练评价结果;所述第一指令信息集,包括n0个用户指令信息;
10、所述虚拟现实头盔,包括头盔本体和虚拟现实显示屏;用户在进行消防车模拟控制训练时,将所述头盔本体佩戴于头部;所述虚拟现实显示屏,安装于头盔本体的内部,与用户眼部相对的位置;所述虚拟现实显示屏,用于接收和显示所述消防点的消防模拟训练的仿真场景;
11、所述模拟仿真终端,用于根据接收的用户预设的消防点信息,生成消防点的消防模拟训练的仿真场景,将所述消防点的消防模拟训练的仿真场景,发送至虚拟现实头盔和主操控面板;接收和解析所述综合控制模块发出的第一指令集信息,得到显示控制信息,利用所述显示控制信息,对所述消防点的消防模拟训练的仿真场景进行更新;
12、所述综合控制模块,与所述主操控面板、手动控制支腿操作面板、遥控控制手柄、模拟仿真终端、手动控制支臂操作面板和模拟仿真终端分别连接;所述虚拟现实头盔,与所述模拟仿真终端连接。
13、所述模拟仿真终端,包括虚拟消防车模型、消防点场景模型、仿真引擎子模块、仿真显示子模块和指令收发解析子模块;
14、所述仿真引擎子模块,用于根据所述预设点信息和显示控制信息,读取虚拟消防车模型信息和消防点场景模型信息,驱动虚拟消防车模型进行相应动作,生成虚拟消防车显示信息和消防点的三维场景信息,将所述虚拟消防车显示信息和消防点的三维场景信息发送至仿真显示子模块;
15、所述仿真显示子模块,用于根据接收到的所述虚拟消防车显示信息和消防点的三维场景信息,生成和更新所述消防点的消防模拟训练的仿真场景,将所述消防点的消防模拟训练的仿真场景,发送至虚拟现实头盔和主操控面板;
16、所述指令收发解析子模块,用于接收的用户预设的消防点信息,将所述消防点信息发送至所述仿真引擎子模块,接收和解析所述综合控制模块发出的第二指令集信息,得到显示控制信息,将所述显示控制信息,发送至所述仿真引擎子模;
17、所述虚拟消防车模型,包括发动机组件、电源组件、支腿组件集、水炮组件、水罐组件、第一支臂组件、第二支臂组件和转台组件;所述支腿组件集,包括左前支腿、左后支腿、右前支腿、右后支腿;每个组件均包括组件信息;所述组件信息,包括组件属性信息、组件状态信息和组件动作信息;所述组件属性信息,包括组件的尺寸及与其他组件的连接关系信息;所述组件状态信息,包括组件位置信息和组件运动速度信息;所述组件动作信息,包括组件动作类型信息;所述虚拟消防车模型信息,包括所述虚拟消防车模型所包含的所有组件的组件信息;
18、所述消防点场景模型,包括场景类型信息、火灾起始时刻、火势初始态势信息、火势动态态势信息;所述场景类型信息,包括住宅、学校、仓库和炼油厂;所述火势初始态势信息,包括火势位置信息和火势初始能量信息;所述火势动态态势信息,包括火源高度、火势热释放速率、火势实时能量。
19、所述主操控面板上设有电源开关、急停开关、发动机熄火启动开关、发动机减速加速开关、后进水开关、水炮出水开关、罐出水开关、水炮急停开关、水炮喷水流态开关、水炮左转右转开关、水炮下俯上仰开关和显示器;所述显示器,用于接收和显示所述消防点的消防模拟训练的仿真场景,发送至所述主操控面板;
20、所述发动机熄火启动开关,包括开关传感器、第一指令开启关闭控制器和指令停止控制器;所述第一指令开启关闭控制器,与所述开关传感器和指令停止控制器,分别进行连接;
21、所述第一指令开启关闭控制器,与所述电源开关、发动机减速加速开关、后进水开关、水炮出水开关、罐出水开关、水炮急停开关、水炮喷水流态开关、水炮左转右转开关、水炮下俯上仰开关、左前垂直开关、左后垂直开关、右前垂直开关、右后垂直开关、左前水平开关、左后水平开关、右前水平开关、右后水平开关、手动支臂左控制开关、手动支臂右控制开关、支腿手动自动开关、遥控支臂左控制开关和遥控支臂右控制开关的指令停止控制器相连接;
22、所述开关传感器,用于采集得到用户对所述发动机熄火启动开关的控制指令;所述用户对所述发动机熄火启动开关的控制指令,包括熄火和启动;所述第一指令开启关闭控制器,用于根据所述用户对所述发动机熄火启动开关的控制指令,生成第一指令开启关闭控制器的停止指令信息;当所述用户对所述发动机熄火启动开关的控制指令为熄火时,确定第一指令开启关闭控制器的停止指令信息为1;当所述用户对所述发动机熄火启动开关的控制指令为启动时,确定第一指令开启关闭控制器的停止指令信息为0;
23、所述指令停止控制器,用于接收得到所述第一指令开启关闭控制器、第二指令开启关闭控制器、第三指令开启关闭控制器的停止指令信息,对所接收得到的所有停止指令信息进行相加运算,得到相加运算结果;若所述相加运算结果为0,则确定第一指令开启关闭控制器的停止指令信息为0;若所相加运算结果不为0,则确定第一指令开启关闭控制器的停止指令信息为1,确定用户对所述发动机熄火启动开关的控制指令为熄火;
24、所述第一指令开启关闭控制器、第二指令开启关闭控制器、第三指令开启关闭控制器和第四指令开启关闭控制器,分别设置于所述发动机熄火启动开关、急停开关、遥控急停开关和电源开关上;
25、所述急停开关,包括开关传感器和第二指令开启关闭控制器;所述第二指令开启关闭控制器,与所述发动机熄火启动开关、电源开关、发动机减速加速开关、后进水开关、水炮出水开关、罐出水开关、水炮急停开关、水炮喷水流态开关、水炮左转右转开关、水炮下俯上仰开关、左前垂直开关、左后垂直开关、右前垂直开关、右后垂直开关、左前水平开关、左后水平开关、右前水平开关、右后水平开关、手动支臂左控制开关、手动支臂右控制开关、支腿手动自动开关、遥控支臂左控制开关和遥控支臂右控制开关的指令停止控制器相连接;所述开关传感器,用于采集得到用户对所述急停开关的控制指令;所述用户对所述急停开关的控制指令,包括停止和继续;当所述用户对所述急停开关的控制指令为停止时,确定第二指令开启关闭控制器的停止指令信息为1;当所述用户对所述急停开关的控制指令为继续时,确定第二指令开启关闭控制器的停止指令信息为0;
26、所述电源开关,包括开关传感器、第四指令开启关闭控制器和指令停止控制器;所述开关传感器,用于采集得到用户对所述电源开关的控制指令;所述用户对所述电源开关的控制指令,包括电源打开和电源关闭;所述第四指令开启关闭控制器,与所述发动机减速加速开关、后进水开关、水炮出水开关、罐出水开关、水炮急停开关、水炮喷水流态开关、水炮左转右转开关、水炮下俯上仰开关、左前垂直开关、左后垂直开关、右前垂直开关、右后垂直开关、左前水平开关、左后水平开关、右前水平开关、右后水平开关、手动支臂左控制开关、手动支臂右控制开关、支腿手动自动开关、遥控支臂左控制开关和遥控支臂右控制开关的指令停止控制器相连接;
27、所述第四指令开启关闭控制器,用于根据所述用户对所述电源开关的控制指令,生成第四指令开启关闭控制器的停止指令信息;当所述用户对所述电源开关的控制指令为电源打开时,确定所述第四指令开启关闭控制器的停止指令信息为0;当所述用户对所述电源开关的控制指令为电源关闭时,确定所述第四指令开启关闭控制器的停止指令信息为1;
28、所述指令停止控制器,用于接收得到所述第一指令开启关闭控制器、第二指令开启关闭控制器、第三指令开启关闭控制器和第四指令开启关闭控制器的停止指令信息,对所接收得到的所有停止指令信息进行相加运算,得到相加运算结果;若所述相加运算结果为0,则确定第四指令开启关闭控制器的停止指令信息为0,确定用户对所述电源开关的控制指令为电源打开;若所相加运算结果不为0,则确定第四指令开启关闭控制器的停止指令信息为1,确定用户对所述电源开关的控制指令为电源关闭;
29、所述发动机减速加速开关,包括开关传感器和指令停止控制器;所述开关传感器,用于采集得到用户对所述发动机减速加速的控制指令;所述用户对所述发动机减速加速的控制指令,包括发动机加速和发动机减速;
30、所述指令停止控制器用于接收得到所述第一指令开启关闭控制器、第二指令开启关闭控制器、第三指令开启关闭控制器和第四指令开启关闭控制器的停止指令信息,对所接收得到的所有停止指令信息进行相加运算,得到相加运算结果;若所述相加运算结果为0,则所述发动机减速加速开关输出的发动机减速加速指令信息为所述用户对所述发动机减速加速的控制指令;若所相加运算结果不为0,则所述发动机减速加速开关输出的发动机减速加速指令信息为停止;
31、所述后进水开关,包括开关传感器和指令停止控制器;所述开关传感器,用于采集得到用户对所述后进水开关的控制指令;所述用户对所述后进水开关的控制指令,包括后进水打开和后进水关闭;
32、所述指令停止控制器用于接收得到所述第一指令开启关闭控制器、第二指令开启关闭控制器、第三指令开启关闭控制器和第四指令开启关闭控制器的停止指令信息,对所接收得到的所有停止指令信息进行相加运算,得到相加运算结果;若所述相加运算结果为0,则所述后进水开关输出的后进水开关指令信息为所述用户对所述后进水开关的控制指令;若所相加运算结果不为0,则所述后进水开关输出的后进水开关指令信息为停止;
33、所述水炮出水开关,包括开关传感器和指令停止控制器;所述开关传感器,用于采集得到用户对所述水炮出水的控制指令;所述用户对所述水炮出水的控制指令,包括水炮出水打开和水炮出水关闭;
34、所述指令停止控制器用于接收得到所述第一指令开启关闭控制器、第二指令开启关闭控制器、第三指令开启关闭控制器和第四指令开启关闭控制器的停止指令信息,对所接收得到的所有停止指令信息进行相加运算,得到相加运算结果;若所述相加运算结果为0,则所述水炮出水开关输出的水炮出水指令信息为所述用户对所述水炮出水的控制指令;若所相加运算结果不为0,则所述水炮出水开关输出的水炮出水指令信息为停止;
35、所述水罐出水开关,包括开关传感器和指令停止控制器;所述开关传感器,用于采集得到用户对所述水罐出水的控制指令;所述用户对所述水罐出水的控制指令,包括水罐出水打开和水罐出水关闭;
36、所述指令停止控制器用于接收得到所述第一指令开启关闭控制器、第二指令开启关闭控制器、第三指令开启关闭控制器和第四指令开启关闭控制器的停止指令信息,对所接收得到的所有停止指令信息进行相加运算,得到相加运算结果;若所述相加运算结果为0,则所述水罐出水开关输出的水罐出水指令信息为所述用户对所述水罐出水的控制指令;若所相加运算结果不为0,则所述水罐出水开关输出的水罐出水指令信息为停止;
37、所述水炮急停开关,包括开关传感器和指令停止控制器;所述开关传感器,用于采集得到用户对所述水炮急停的控制指令;所述用户对所述水炮急停的控制指令,包括水炮出水打开和水炮出水关闭;
38、所述指令停止控制器用于接收得到所述第一指令开启关闭控制器、第二指令开启关闭控制器、第三指令开启关闭控制器和第四指令开启关闭控制器的停止指令信息,对所接收得到的所有停止指令信息进行相加运算,得到相加运算结果;若所述相加运算结果为0,则所述水炮急停开关输出的水炮急停指令信息为所述用户对所述水炮急停的控制指令;若所相加运算结果不为0,则所述水炮急停开关输出的水炮急停指令信息为停止;
39、所述水炮喷水流态开关,包括开关传感器和指令停止控制器;所述开关传感器,用于采集得到用户对所述水炮喷水流态的控制指令;所述用户对所述水炮喷水流态的控制指令,包括直流出水和开花出水;
40、所述指令停止控制器用于接收得到所述第一指令开启关闭控制器、第二指令开启关闭控制器、第三指令开启关闭控制器和第四指令开启关闭控制器的停止指令信息,对所接收得到的所有停止指令信息进行相加运算,得到相加运算结果;若所述相加运算结果为0,则所述水炮喷水流态开关输出的水炮喷水流态指令信息为所述用户对所述水炮喷水流态的控制指令;若所相加运算结果不为0,则所述水炮喷水流态开关输出的水炮喷水流态指令信息为停止;
41、所述水炮左转右转开关,包括开关传感器和指令停止控制器;所述开关传感器,用于采集得到用户对所述水炮左转右转的控制指令;所述用户对所述水炮左转右转的控制指令,包括水炮左转和水炮右转;
42、所述指令停止控制器用于接收得到所述第一指令开启关闭控制器、第二指令开启关闭控制器、第三指令开启关闭控制器和第四指令开启关闭控制器的停止指令信息,对所接收得到的所有停止指令信息进行相加运算,得到相加运算结果;若所述相加运算结果为0,则所述水炮左转右转开关输出的水炮左转右转指令信息为所述用户对所述水炮左转右转的控制指令;若所相加运算结果不为0,则所述水炮左转右转开关输出的水炮左转右转指令信息为停止;
43、所述水炮下俯上仰开关,包括开关传感器和指令停止控制器;所述开关传感器,用于采集得到用户对所述水炮下俯上仰的控制指令;所述用户对所述水炮下俯上仰的控制指令,包括水炮下俯和水炮上仰;
44、所述指令停止控制器用于接收得到所述第一指令开启关闭控制器、第二指令开启关闭控制器、第三指令开启关闭控制器和第四指令开启关闭控制器的停止指令信息,对所接收得到的所有停止指令信息进行相加运算,得到相加运算结果;若所述相加运算结果为0,则所述水炮下俯上仰开关输出的水炮下俯上仰指令信息为所述用户对所述水炮下俯上仰的控制指令;若所相加运算结果不为0,则所述水炮下俯上仰开关输出的水炮下俯上仰指令信息为停止。
45、所述手动控制支腿操作面板上设有左前垂直开关、左后垂直开关、右前垂直开关、右后垂直开关、左前水平开关、左后水平开关、右前水平开关、右后水平开关;
46、所述左前垂直开关,包括开关传感器和指令停止控制器;所述开关传感器,用于采集得到用户对所述左前垂直开关的控制指令;所述用户对所述左前垂直开关的控制指令,包括左前支腿垂直向上运动、左前支腿垂直向下运动、左前支腿垂直停止运动;
47、所述指令停止控制器用于接收得到所述第一指令开启关闭控制器、第二指令开启关闭控制器、第三指令开启关闭控制器和第四指令开启关闭控制器的停止指令信息,对所接收得到的所有停止指令信息进行相加运算,得到相加运算结果;若所述相加运算结果为0,则所述左前垂直开关输出的左前垂直开关指令信息为所述用户对所述左前垂直开关的控制指令;若所相加运算结果不为0,则所述左前垂直开关输出的左前垂直开关指令信息为停止;
48、所述第一指令开启关闭控制器、第二指令开启关闭控制器、第三指令开启关闭控制器和第四指令开启关闭控制器,分别设置于所述发动机熄火启动开关、急停开关、遥控急停开关和电源开关上;
49、所述左后垂直开关,包括开关传感器和指令停止控制器;所述开关传感器,用于采集得到用户对所述左后垂直开关的控制指令;所述用户对所述左后垂直开关的控制指令,包括左后支腿垂直向上运动、左后支腿垂直向下运动、左后支腿垂直停止运动;
50、所述指令停止控制器用于接收得到所述第一指令开启关闭控制器、第二指令开启关闭控制器、第三指令开启关闭控制器和第四指令开启关闭控制器的停止指令信息,对所接收得到的所有停止指令信息进行相加运算,得到相加运算结果;若所述相加运算结果为0,则所述左后垂直开关输出的左后垂直开关指令信息为所述用户对所述左后垂直开关的控制指令;若所相加运算结果不为0,则所述左后垂直开关输出的左后垂直开关指令信息为停止;
51、所述右前垂直开关,包括开关传感器和指令停止控制器;所述开关传感器,用于采集得到用户对所述右前垂直开关的控制指令;所述用户对所述右前垂直开关的控制指令,包括右前支腿垂直向上运动、右前支腿垂直向下运动、右前支腿垂直停止运动;
52、所述指令停止控制器用于接收得到所述第一指令开启关闭控制器、第二指令开启关闭控制器、第三指令开启关闭控制器和第四指令开启关闭控制器的停止指令信息,对所接收得到的所有停止指令信息进行相加运算,得到相加运算结果;若所述相加运算结果为0,则所述右前垂直开关输出的右前垂直开关指令信息为所述用户对所述右前垂直开关的控制指令;若所相加运算结果不为0,则所述右前垂直开关输出的右前垂直开关指令信息为停止;
53、所述右后垂直开关,包括开关传感器和指令停止控制器;所述开关传感器,用于采集得到用户对所述右后垂直开关的控制指令;所述用户对所述右后垂直开关的控制指令,包括右后支腿垂直向上运动、右后支腿垂直向下运动、右后支腿垂直停止运动;
54、所述指令停止控制器用于接收得到所述第一指令开启关闭控制器、第二指令开启关闭控制器、第三指令开启关闭控制器和第四指令开启关闭控制器的停止指令信息,对所接收得到的所有停止指令信息进行相加运算,得到相加运算结果;若所述相加运算结果为0,则所述右后垂直开关输出的右后垂直开关指令信息为所述用户对所述右后垂直开关的控制指令;若所相加运算结果不为0,则所述右后垂直开关输出的右后垂直开关指令信息为停止;
55、所述左前水平开关,包括开关传感器和指令停止控制器;所述开关传感器,用于采集得到用户对所述左前水平开关的控制指令;所述用户对所述左前水平开关的控制指令,包括左前支腿水平向前运动、左前支腿水平向后运动、左前支腿水平停止运动;
56、所述指令停止控制器用于接收得到所述第一指令开启关闭控制器、第二指令开启关闭控制器、第三指令开启关闭控制器和第四指令开启关闭控制器的停止指令信息,对所接收得到的所有停止指令信息进行相加运算,得到相加运算结果;若所述相加运算结果为0,则所述左前水平开关输出的左前水平开关指令信息为所述用户对所述左前水平开关的控制指令;若所相加运算结果不为0,则所述左前水平开关输出的左前水平开关指令信息为停止;
57、所述左后水平开关,包括开关传感器和指令停止控制器;所述开关传感器,用于采集得到用户对所述左后水平开关的控制指令;所述用户对所述左后水平开关的控制指令,包括左后支腿水平向前运动、左后支腿水平向后运动、左后支腿水平停止运动;
58、所述指令停止控制器用于接收得到所述第一指令开启关闭控制器、第二指令开启关闭控制器、第三指令开启关闭控制器和第四指令开启关闭控制器的停止指令信息,对所接收得到的所有停止指令信息进行相加运算,得到相加运算结果;若所述相加运算结果为0,则所述左后水平开关输出的左后水平开关指令信息为所述用户对所述左后水平开关的控制指令;若所相加运算结果不为0,则所述左后水平开关输出的左后水平开关指令信息为停止;
59、所述右前水平开关,包括开关传感器和指令停止控制器;所述开关传感器,用于采集得到用户对所述右前水平开关的控制指令;所述用户对所述右前水平开关的控制指令,包括右前支腿水平向前运动、右前支腿水平向后运动、右前支腿水平停止运动;
60、所述指令停止控制器用于接收得到所述第一指令开启关闭控制器、第二指令开启关闭控制器、第三指令开启关闭控制器和第四指令开启关闭控制器的停止指令信息,对所接收得到的所有停止指令信息进行相加运算,得到相加运算结果;若所述相加运算结果为0,则所述右前水平开关输出的右前水平开关指令信息为所述用户对所述右前水平开关的控制指令;若所相加运算结果不为0,则所述右前水平开关输出的右前水平开关指令信息为停止;
61、所述右后水平开关,包括开关传感器和指令停止控制器;所述开关传感器,用于采集得到用户对所述右后水平开关的控制指令;所述用户对所述右后水平开关的控制指令,包括右后支腿水平向前运动、右后支腿水平向后运动、右后支腿水平停止运动;
62、所述指令停止控制器用于接收得到所述第一指令开启关闭控制器、第二指令开启关闭控制器、第三指令开启关闭控制器和第四指令开启关闭控制器的停止指令信息,对所接收得到的所有停止指令信息进行相加运算,得到相加运算结果;若所述相加运算结果为0,则所述右后水平开关输出的右后水平开关指令信息为所述用户对所述右后水平开关的控制指令;若所相加运算结果不为0,则所述右后水平开关输出的右后水平开关指令信息为停止。
63、所述手动控制支臂操作面板上设有手动支臂左控制开关和手动支臂右控制开关;
64、所述手动支臂左控制开关,包括开关传感器和指令停止控制器;所述开关传感器,用于采集得到用户对所述手动支臂左控制开关的控制指令;所述用户对所述手动支臂左控制开关的控制指令,包括大臂伸长、大臂收缩、小臂上升和小臂下降;
65、所述指令停止控制器用于接收得到所述第一指令开启关闭控制器、第二指令开启关闭控制器、第三指令开启关闭控制器和第四指令开启关闭控制器的停止指令信息,对所接收得到的所有停止指令信息进行相加运算,得到相加运算结果;若所述相加运算结果为0,则所述手动支臂左控制开关输出的手动支臂左控制开关指令信息为所述用户对所述手动支臂左控制开关的控制指令;若所相加运算结果不为0,则所述手动支臂左控制开关输出的手动支臂左控制开关指令信息为停止;
66、所述手动支臂右控制开关,包括开关传感器和指令停止控制器;所述开关传感器,用于采集得到用户对所述手动支臂右控制开关的控制指令;所述用户对所述手动支臂右控制开关的控制指令,包括大臂下降、大臂上升、转台左转和转台右转;
67、所述指令停止控制器用于接收得到所述第一指令开启关闭控制器、第二指令开启关闭控制器、第三指令开启关闭控制器和第四指令开启关闭控制器的停止指令信息,对所接收得到的所有停止指令信息进行相加运算,得到相加运算结果;若所述相加运算结果为0,则所述手动支臂右控制开关输出的手动支臂右控制开关指令信息为所述用户对所述手动支臂右控制开关的控制指令;若所相加运算结果不为0,则所述手动支臂右控制开关输出的手动支臂右控制开关指令信息为停止;
68、所述第一指令开启关闭控制器、第二指令开启关闭控制器、第三指令开启关闭控制器和第四指令开启关闭控制器,分别设置于所述发动机熄火启动开关、急停开关、遥控急停开关和电源开关上。
69、所述遥控控制手柄上设有遥控急停开关、支腿手动自动开关、遥控支臂左控制开关和遥控支臂右控制开关;
70、所述遥控急停开关,包括开关传感器和第三指令开启关闭控制器;所述第三指令开启关闭控制器,与所述发动机熄火启动开关、电源开关、发动机减速加速开关、后进水开关、水炮出水开关、罐出水开关、水炮急停开关、水炮喷水流态开关、水炮左转右转开关、水炮下俯上仰开关、左前垂直开关、左后垂直开关、右前垂直开关、右后垂直开关、左前水平开关、左后水平开关、右前水平开关、右后水平开关、手动支臂左控制开关、手动支臂右控制开关、支腿手动自动开关、遥控支臂左控制开关和遥控支臂右控制开关的指令停止控制器相连接;所述开关传感器,用于采集得到用户对所述遥控急停开关的控制指令;所述用户对所述遥控急停开关的控制指令,包括停止和继续;当所述用户对所述遥控急停开关的控制指令为停止时,确定第三指令开启关闭控制器的停止指令信息为1;当所述用户对所述遥控急停开关的控制指令为继续时,确定第三指令开启关闭控制器的停止指令信息为0;
71、所述遥控支臂右控制开关,包括开关传感器和指令停止控制器;所述开关传感器,用于采集得到用户对所述遥控支臂右控制开关的控制指令;所述用户对所述遥控支臂右控制开关的控制指令,包括大臂下降、大臂上升、转台左转和转台右转;
72、所述指令停止控制器用于接收得到所述第一指令开启关闭控制器、第二指令开启关闭控制器、第三指令开启关闭控制器和第四指令开启关闭控制器的停止指令信息,对所接收得到的所有停止指令信息进行相加运算,得到相加运算结果;若所述相加运算结果为0,则所述遥控支臂右控制开关输出的遥控支臂右控制开关指令信息为所述用户对所述遥控支臂右控制开关的控制指令;若所相加运算结果不为0,则所述遥控支臂右控制开关输出的遥控支臂右控制开关指令信息为停止;
73、所述遥控支臂左控制开关,包括开关传感器和指令停止控制器;所述开关传感器,用于采集得到用户对所述遥控支臂左控制开关的控制指令;所述用户对所述遥控支臂左控制开关的控制指令,包括大臂伸长、大臂收缩、小臂上升和小臂下降;
74、所述指令停止控制器用于接收得到所述第一指令开启关闭控制器、第二指令开启关闭控制器、第三指令开启关闭控制器和第四指令开启关闭控制器的停止指令信息,对所接收得到的所有停止指令信息进行相加运算,得到相加运算结果;若所述相加运算结果为0,则所述遥控支臂左控制开关输出的遥控支臂左控制开关指令信息为所述用户对所述遥控支臂左控制开关的控制指令;若所相加运算结果不为0,则所述遥控支臂左控制开关输出的遥控支臂左控制开关指令信息为停止;
75、所述第一指令开启关闭控制器、第二指令开启关闭控制器、第三指令开启关闭控制器和第四指令开启关闭控制器,分别设置于所述发动机熄火启动开关、急停开关、遥控急停开关和电源开关上。
76、本发明实施例第二方面,公开了一种消防车模拟操控训练方法,利用所述的消防车模拟操控训练装置来实现,包括:
77、s1,利用所述综合控制模块,接收得到用户预设的消防点信息;s2,利用所述模拟仿真终端,根据接收的用户预设的消防点信息,生成消防点的消防模拟训练的仿真场景;s3,利用所述主操控面板和虚拟现实头盔,显示所述消防点的消防模拟训练的仿真场景;s4,利用所述主操控面板,接收得到用户对消防车的发动机和水炮的指令信息;利用所述手动控制支腿操作面板,接收得到用户对消防车的支腿的指令信息;利用所述手动控制支臂控制面板,接收得到用户对消防车的支臂的指令信息;利用所述遥控控制手柄,接收得到用户对消防车的支臂和支腿的指令信息;s5,利用所述s4中接收得到的用户的所有控制指令,构建得到第一指令信息集;s6,对所述第一指令信息集与用户预设的消防点信息对应的操作规范信息进行比对处理,得到操作规范评价值;s7,对所述模拟仿真终端得到的灭火后的火势实时能量,与所述模拟仿真终端得到的火势初始能量信息进行评估计算处理,得到灭火效果评价值;s8,对所述操作规范评价值和灭火效果评价值进行综合评判,得到用户的消防车模拟操控训练评价结果。
78、所述对所述第一指令信息集与用户预设的消防点信息对应的操作规范信息进行比对处理,得到操作规范评价值,包括:
79、s61,所述第一指令信息集表示为矩阵a,所述用户预设的消防点信息对应的操作规范信息表示为矩阵b;所述矩阵a的行向量,为用户对某一开关的控制指令的时间序列值;所述矩阵b的行向量,为与所述矩阵a的行向量对应的用户对所述开关的操作规范的时间序列值;矩阵a和矩阵b的维度相同;矩阵a的行向量的时间序列值,与矩阵b的行向量的时间序列值的采样时间起点,均是火灾起始时刻;
80、s62,利用矩阵a与矩阵b相减,得到差值矩阵y;所述差值矩阵y的表达式为:
81、y=|a-b|;
82、s63,对所述差值矩阵进行分解处理,得到差值矩阵的左分解矩阵、特征矩阵和右分解矩阵;
83、所述分解处理,其计算表达式为:
84、y=uxv,
85、其中,u为左分解矩阵,x为特征矩阵,v为右分解矩阵,u和v均为正交矩阵,x为对角矩阵;
86、s64,将所述特征矩阵的对角线元素进行提取,得到特征向量;所述特征向量表示为ix,ix=[λ1,λ2,…,λn1];
87、s65,对所述特征向量和序号值进行曲线拟合处理,得到最佳一致逼近多项式;
88、所述线性拟合处理,是以特性向量元素序号值ix为已知自变量,以特征向量值为已知因变量,利用所述已知自变量和已知因变量构建得到待逼近曲线,利用函数逼近法对所述待逼近曲线进行曲线拟合,得到最佳一致逼近多项式f(ix);
89、s66,利用所述最佳一致逼近多项式,对所述特性向量元素序号值进行计算处理,得到拟合特征向量;
90、s67,利用拟合特征向量作为权值,对特征向量进行加权求和处理,得到操作规范评价值z1。
91、所述对所述模拟仿真终端得到的灭火后的火势实时能量,与所述模拟仿真终端得到的火势初始能量信息进行评估计算处理,得到灭火效果评价值,包括:
92、所述评估计算处理的表达式为:
93、z2=es2/s1,
94、其中,s2表示灭火后的火势实时能量,s1表示火势初始能量。
95、所述对所述操作规范评价值和灭火效果评价值进行综合评判,得到用户的消防车模拟操控训练评价结果,包括:
96、所述综合评判,其评判不等式为:
97、∣z1-x1∣≤a1,
98、∣z2-y1∣≤a2,
99、∣(z1-x1)(z2-y1)∣≤a3,
100、其中,x1为操作规范评价阈值,a1为操作规范评价范围值,y1为灭火效果评价阈值,a2为灭火效果评价范围值,z2为灭火效果评价值,a3为联合评价范围值;
101、当所述操作规范评价值和灭火效果评价值,均满足所述评判不等式时,确定用户的消防车模拟操控训练评价结果为合格;当所述操作规范评价值和灭火效果评价值,不均满足所述评判不等式时,确定用户的消防车模拟操控训练评价结果为不合格。
102、本发明的有益效果为:
103、1、本发明提供了一种基于vr虚拟训练场景的消防车模拟操控装置训练方法,所述消防车模拟器训练装置用于结合vr增强现实技术对消防点进行模拟操作,所述消防车模拟训练装置包括主操作控制面板、手动控制支腿操控面板、手动控制支臂操作面板、遥控控制手柄。采用上述技术方案后,训练者可以按照真实的消防操作,对消防车模拟器操作面板进行参数设置,并手持消防车模拟器遥控手柄,训练人员头戴vr增强现实头盔,将模拟车辆开到消防点对消防点进行消防操作,可以按照一比一的操作进行消防演练,在虚实结合场景里达到训练效果,通过模拟真实的消防操作,与vr增强现实技术相结合,使训练人员逼真的练习操作消防的流程,有效提高了训练人员的操作能力,以及消防技能的掌握的效率;
104、2、本发明方法对于突发训练情况时,停止一切操作,专门设置了4路停止训练的控制支路,有利于消防员安全技能的训练,也提升了装置对真实场景的模拟能力;
105、3、本发明对于消防员训练效果的评价方面,综合考虑了操作步骤和灭火效果两个因素,考虑因素较为全面,评价过程较为客观。
- 还没有人留言评论。精彩留言会获得点赞!