一种抗浓烟消防巡检机器人的制作方法
本技术涉及消防机器人领域,具体涉及一种抗浓烟消防巡检机器人。
背景技术:
1、消防机器人是特征机器人的一种,在灭火和抢险救援中愈加发挥举足轻重的作用。随着社会经济的迅猛发展,建筑和企业生产的特殊性,导致化学危险品的放射性物质泄漏以及燃烧、爆炸、坍塌的事故隐患增加,事故发生的概率也相应提高。一旦发生灾害事故,消防员面对高温、黑暗、有毒和浓烟等危害环境时,若没有相应的设备贸然冲进现场,不仅不能完成任务,还会徒增人员伤亡。因此,消防巡检机器人在消防领域的运用与推广已成为必然的发展趋势。
2、在火灾现场随着火情的发展与蔓延,浓烟是不可避免的现象,而浓烟往往是导致缺氧、中毒的罪魁祸首。现有技术中常见的消防巡检机器人在浓烟状态下无法对火场状态进行实时监测,不便于对火灾第一现场数据与情况的及时收集与了解。
技术实现思路
1、实用新型目的:提供一种抗浓烟消防巡检机器人,以解决现有技术存在的上述问题。
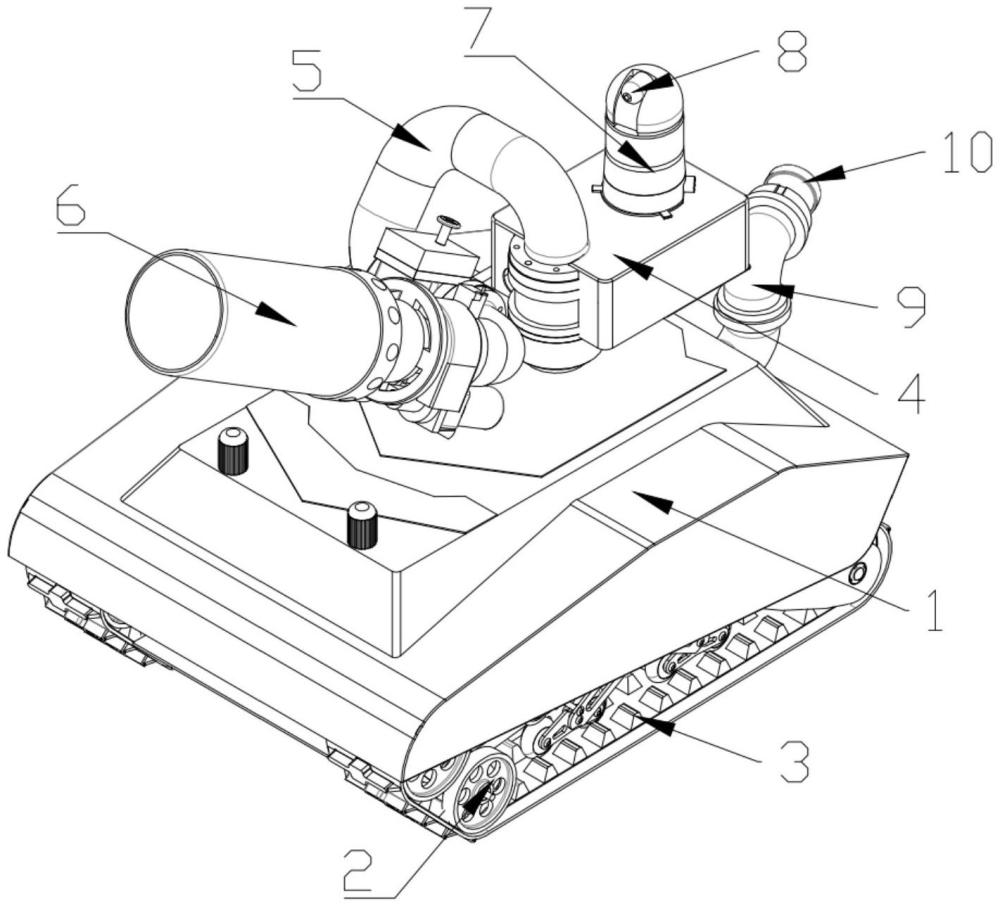
2、技术方案:一种抗浓烟消防巡检机器人,包括移动单元组、监测单元组和吹风单元组三个部分。所述移动单元组包括用于对各部件进行承载限定的基座;与所述基座作业方向下表面通过衔接箱相连,可进行相应移动调节的履带组件;所述监测单元组置于所述基座作业面上表面处,可进行全方位实施监测作业;所述吹风单元组置于所述基座作业面上表面处,并与所述监测单元组留有预定的作业距离,可进行预定范围内烟雾吹散作业。
3、在进一步的实施例中,所述履带组件包括旋转柱、移动轮和履带三个部分。所述旋转柱贯穿过所述衔接箱,且两端均延伸出所述衔接箱预定距离,可进行全方位转动作业;所述移动轮与所述旋转柱相连,可跟随所述旋转柱的转动而转动,且所述移动轮为多个;所述履带包裹于所述移动轮作业面外面处,且与所述移动轮相啮合,可在所述移动轮的带动下进行相应作业位置的调整。
4、在进一步的实施例中,所述监测单元组包括支撑柱、旋转调节台和摄像机构三个部分。所述支撑柱置于所述基座作业方向上表面处,用于进行相应的限位支撑作业;所述旋转调节台与所述支撑柱转动连接,可绕与所述支撑柱的连接点进行全方位转动调节作业;所述摄像机构置于所述旋转调节台作业面表面,可进行相应的实时监测成像作业。
5、在进一步的实施例中,所述吹风组件包括衔接管和吹风喷头两个部分。所述衔接管具有预定的完成弧度,并与所述旋转调节台相连,可跟随所述旋转调节台的转动调节而进行相应作业位置的调节;所述吹风喷头与所述衔接管相连,可跟随所述衔接管进行相应作业位置的调节,并可进行预定范围内的吹风作业。
6、在进一步的实施例中,所述摄像机构包括摄像基座与摄像头,所述摄像基座与所述旋转调节台相连,且作业面表面设有预定尺寸的开放式凹槽,所述摄像头转动连接于所述摄像基座的开放式凹槽内,可进行预定范围内的转动调节作业。
7、在进一步的实施例中,所述基座作业方向后方壁面处设有应急喷淋装置,所述应急喷淋装置包括具有预定弯折弧度的喷淋管和与所述喷淋管相连的喷淋头,可进行预定范围内的应急喷淋作业。
8、有益效果:本实用新型涉及一种抗浓烟型消防巡检机器人,涉及消防机器人领域,包括移动单元组、监测单元组和吹风单元组。移动单元组包括用于对各部件进行承载限定的基座;与所述基座作业方向下表面通过衔接箱相连,可进行相应移动调节的履带组件;监测单元组置于所述基座作业面上表面处,可进行全方位实施监测作业;吹风单元组置于所述基座作业面上表面处,并与所述监测单元组留有预定的作业距离,可进行预定范围内烟雾吹散作业。本申请通过吹风单元组与监测单元组的相互配合可在浓烟环境下保证实时监测的正常运行,以便于对火灾现场的实时状况进行了解与数据收集处理,以便于进一步的消防灭火处理。
技术特征:
1.一种抗浓烟消防巡检机器人,其特征在于包括:
2.根据权利要求1所述的一种抗浓烟消防巡检机器人,其特征在于:
3.根据权利要求1所述的一种抗浓烟消防巡检机器人,其特征在于:
技术总结
本技术涉及一种抗浓烟消防巡检机器人,涉及消防机器人领域,包括移动单元组、监测单元组和吹风单元组。移动单元组包括用于对各部件进行承载限定的基座;与所述基座作业方向下表面通过衔接箱相连,可进行相应移动调节的履带组件;监测单元组置于所述基座作业面上表面处,可进行全方位实施监测作业;吹风单元组置于所述基座作业面上表面处,并与所述监测单元组留有预定的作业距离,可进行预定范围内烟雾吹散作业。本申请通过吹风单元组与监测单元组的相互配合可在浓烟环境下保证实时监测的正常运行,以便于对火灾现场的实时状况进行了解与数据收集处理,以便于进一步的消防灭火处理。
技术研发人员:张利,李猛,鹿云海,杨文杰
受保护的技术使用者:徐州鑫科机器人有限公司
技术研发日:20230517
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!