一种高空作业用的智能收放安全带的制作方法
本技术涉及安全防护,尤其涉及一种高空作业用的智能收放安全带。
背景技术:
1、高空作业是电力、建筑、造船、通信等行业常见的作业形式,高空作业难度大、危险性高,稍不注意就可能发生坠落事故。各行业在高空作业时为了保证作业人员的安全,通常会给作业人员佩带全身式安全带,全身式安全带是作业人员高空作业时预防坠落伤亡的防护用品,是由带体、安全配绳、缓冲包和金属配件组成。全身式安全带通过两边肩膀,臀部,固定到双腿之间的卡扣上,安全带能紧贴骨盆、肩膀和胸部,能有效减小冲击力。
2、全身式安全带在登高作业时,往往需要攀爬过程中不停的锁紧安全配绳挂钩,作业人员高度超过挂钩高度时解锁安全配绳挂钩,又重新在新的位置锁紧安全配绳挂钩,比较费时费力,工作效率低。由于安全配绳较长,使用者在行走特别是在爬楼梯过程中需要将安全配绳卷在一起用手拿着,费时费力;作业人员在高空作业过程中,安全配绳拖在作业人员脚旁,容易绊倒工作人员;当作业人员不慎掉落时,由于安全配绳太长,安全配绳迅速绷直后承受的极限荷载加倍,安全配绳容易断裂,发生人员伤亡事故。
3、在现有技术中,如申请号为202221037495.1的中国实用新型专利公开了一种可收缩防坠落勒伤的安全带,包括加厚合金刚卡勾、全编安全绳、收纳盒、高强度丙纶吊带和背带式安全带,所述全编安全绳的一端连接加厚合金刚卡勾,另一端连接收纳盒;所述收纳盒内设置有可旋转的中心转轴,所述高强度丙纶吊带的一端与所述中心转轴固定连接,另一端与所述背带式安全带背部交叉重叠处固定连接。该专利技术方案中的高强度丙纶吊带虽然可以自动收卷,但还存在以下问题:
4、1、背带式安全带只有一根全编安全绳作为安全保障,安全保障较为单一,且加厚合金刚卡勾、全编安全绳、收纳盒、高强度丙纶吊带和背带式安全带是以串联的方式连接,其中任何一个配件出现问题,都会给作业人员带来生命危险。
5、2、高强度丙纶吊带通过卷收器盒内的螺旋弹簧自动收紧,高强度丙纶吊带一直处于绷紧状态,螺旋弹簧不可调节收紧长度和力度,作业人员在操作过程中容易产生不适感。
技术实现思路
1、本实用新型要解决的技术问题在于克服现有技术的不足,提供一种高空作业用的智能收放安全带。
2、本实用新型通过以下技术方案实现:
3、一种高空作业用的智能收放安全带,包括全身式安全带(1),还包括:
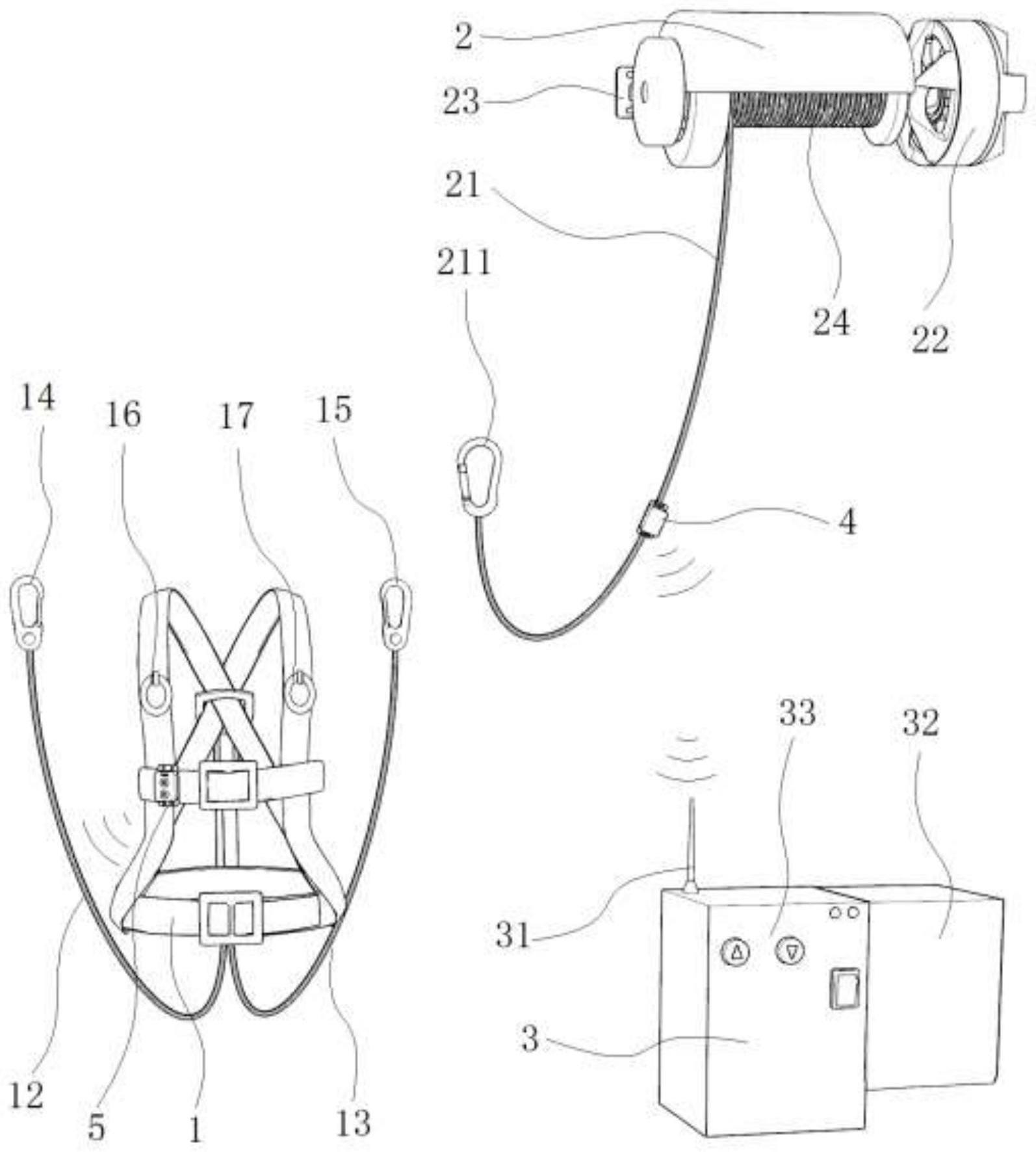
4、智能收放吊机(2),固定设置在经常进行高空作业位置的顶端,智能收放吊机(2)上缠绕设置有安全绳(21)的固定端,安全绳(21)的收放端连接在全身式安全带(1)上;
5、智能收放控制器(3),设置在高空作业位置的地面上,用于控制智能收放吊机(2)收放安全绳(21);
6、三轴倾角传感器(4),设置在靠近全身式安全带(1)的一段安全绳(21)上,用于将自身姿态信息传送给智能收放控制器(3);
7、遥控器(5),设置在全身式安全带(1)上,用于将不同工况下的工作指令发送给智能收放控制器(3)。
8、更进一步的方案是,所述智能收放吊机(2)包括安全绳(21)、收放电机(22)、电机固定基座(23)和收放卷轴(24),所述安全绳(21)的固定端缠绕设置在收放卷轴(24)上,收放卷轴(24)同轴设置在收放电机(22)的输出轴上,电机固定基座(23)设置在收放卷轴(24)壳体后方,电机固定基座(23)通过螺栓固定设置在高空作业位置的顶端。
9、更进一步的方案是,所述安全绳(21)的收放端设置有安全绳挂钩(211),全身式安全带(1)一侧设置有安全绳固定套(11),安全绳挂钩(211)穿过安全绳固定套(11)挂扣在全身式安全带(1)上。
10、更进一步的方案是,所述的智能收放控制器(3)上方设置有接收天线(31),接收天线(31)接收三轴倾角传感器(4)和遥控器(5)的无线信号。
11、更进一步的方案是,所述的智能收放控制器(3)上设置有电机控制驱动器(32),电机控制驱动器(32)电性连接收放电机(22)。
12、更进一步的方案是,所述的智能收放控制器(3)箱体前端设置有控制面板(33),控制面板(33)上设置有上升按钮、下降按钮、总开关和工作状态灯。
13、更进一步的方案是,所述的遥控器(5)上设置有上升模式按键(51)和下降模式按键(52)。
14、更进一步的方案是,所述的全身式安全带(1)前端固定设置有左辅助绳(12)和右辅助绳(13),左辅助绳(12)末端设置有左辅助挂钩(14),右辅助绳(13)末端设置有右辅助挂钩(15)。
15、更进一步的方案是,所述全身式安全带(1)的左肩带上设置有左挂环(16),全身式安全带(1)的右肩带上设置有右挂环(17)。
16、更进一步的方案是,所述的三轴倾角传感器(4)和遥控器(5)设置有2.4ghz载频的无线信号发射器。
17、本实用新型的工作原理:
18、本实用新型利用固定在高空作业位置顶端的智能收放吊机(2)收放单独挂扣在全身式安全带(1)上的安全绳(21),全身式安全带(1)上设置有遥控器(5)遥控地面上的智能收放控制器(3)切换升降的模式,作业人员在向上或向下攀爬的过程中,靠近全身式安全带(1)的一段安全绳(21)上的三轴倾角传感器(4)将自身姿态信息传送给智能收放控制器(3),智能收放控制器(3)上的接收天线(31)接收到三轴倾角传感器(4)的姿态信息后,控制电机控制驱动器(32)驱动收放电机(22)收卷或释放安全绳(21),在整个向上或向下攀爬的过程中,安全绳(21)释放出来的长度始终和工作人员与收放电机(22)的高度差接近。
19、全身式安全带(1)的肩带上设置有左挂环(16)和右挂环(17)挂扣收纳左辅助绳(12)和右辅助绳(13),作业人员攀爬过程中,左辅助绳(12)和右辅助绳(13)挂扣在左挂环(16)和右挂环(17)上,不影响作业人员攀爬,作业人员攀爬到作业面后,将左辅助绳(12)和右辅助绳(13)取下挂扣在作业面上方的钢结构件上。
20、本实用新型相比现有技术的有益效果:
21、本实用新型通过三轴倾角传感器(4)传送倾角信号给智能收放控制器(3),通过智能收放控制器(3)自动控制收放电机(22)收放安全绳(21),减少原来边爬边固定防护绳的工作时间,降低劳动强度,提升工作效率。
22、作业人员在攀爬过程中,安全绳(21)可以自动收放,安全绳(21)释放出来的长度始终和工作人员与收放电机(22)高度差接近,在工作人员攀爬过程中进行安全防护,能有效减小冲击力。
23、本实用新型利用左辅助绳(12)、右辅助绳(13)和安全绳(21)三条安全绳形成三重安全保障,保障作业人员作业过程中的生命安全。
24、作业人员作业过程中,安全绳(21)处于自由垂落的状态,防止安全绳(21)紧绷影响作业人员作业。
技术特征:
1.一种高空作业用的智能收放安全带,包括全身式安全带(1),其特征在于,还包括:
2.根据权利要求1所述的高空作业用的智能收放安全带,其特征在于:所述智能收放吊机(2)包括安全绳(21)、收放电机(22)、电机固定基座(23)和收放卷轴(24),所述安全绳(21)的固定端缠绕设置在收放卷轴(24)上,收放卷轴(24)同轴设置在收放电机(22)的输出轴上,电机固定基座(23)设置在收放卷轴(24)壳体后方,电机固定基座(23)通过螺栓固定在高空作业位置的顶端。
3.根据权利要求1所述的高空作业用的智能收放安全带,其特征在于:所述安全绳(21)的收放端设置有安全绳挂钩(211),全身式安全带(1)一侧设置有安全绳固定套(11),安全绳挂钩(211)穿过安全绳固定套(11)挂扣在全身式安全带(1)上。
4.根据权利要求1所述的高空作业用的智能收放安全带,其特征在于:所述的智能收放控制器(3)上方设置有接收天线(31),接收天线(31)接收三轴倾角传感器(4)和遥控器(5)的无线信号。
5.根据权利要求2所述的高空作业用的智能收放安全带,其特征在于:所述的智能收放控制器(3)上设置有电机控制驱动器(32),电机控制驱动器(32)电性连接收放电机(22)。
6.根据权利要求1所述的高空作业用的智能收放安全带,其特征在于:所述的智能收放控制器(3)箱体前端设置有控制面板(33),控制面板(33)上设置有上升按钮、下降按钮、总开关和工作状态灯。
7.根据权利要求1所述的高空作业用的智能收放安全带,其特征在于:所述的遥控器(5)上设置有上升模式按键(51)和下降模式按键(52)。
8.根据权利要求1所述的高空作业用的智能收放安全带,其特征在于:所述的全身式安全带(1)前端固定设置有左辅助绳(12)和右辅助绳(13),左辅助绳(12)末端设置有左辅助挂钩(14),右辅助绳(13)末端设置有右辅助挂钩(15)。
9.根据权利要求1所述的高空作业用的智能收放安全带,其特征在于:所述全身式安全带(1)的左肩带上设置有左挂环(16),全身式安全带(1)的右肩带上设置有右挂环(17)。
10.根据权利要求1所述的高空作业用的智能收放安全带,其特征在于:所述的三轴倾角传感器(4)和遥控器(5)设置有2.4ghz载频的无线信号发射器。
技术总结
本技术公开了一种高空作业用的智能收放安全带,包括全身式安全带和智能收放吊机,智能收放吊机固定设置在经常进行高空作业位置的顶端,智能收放吊机上缠绕设置有安全绳,安全绳的收放端连接在全身式安全带上;高空作业位置的地面上设置有智能收放控制器;安全绳上设置有三轴倾角传感器;全身式安全带上设置有遥控器。本技术利用智能收放吊机收放安全绳,遥控器遥控智能收放控制器切换升降模式,作业人员攀爬时,三轴倾角传感器将自身姿态信息传送给智能收放控制器,智能收放控制器接收到姿态信息后控制电机控制驱动器驱动收放电机收放安全绳,在作业人员攀爬过程中,安全绳释放长度始终和工作人员与收放电机的高度差接近。
技术研发人员:宋东,赵克敏
受保护的技术使用者:昆明船舶设备研究试验中心(中国船舶集团有限公司七五〇试验场)
技术研发日:20230531
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!