一种抱盒成型机的制作方法
1.本技术涉及纸盒加工的领域,尤其是涉及一种抱盒成型机。
背景技术:
2.包装纸盒通常由盒胚以及包覆在盒胚表面的装饰纸组成,在生产长方体包装纸盒的过程中,主要有两大部分,其一是将上好胶的装饰纸对应的部分糊在长方体状的盒胚底面形成纸盒半成品,其二对纸盒半成品进一步加工,完成剩余的糊边、压泡、折边、折入成型等作业。
3.公告号为cn210100824u的专利公开了一种纸盒成型机,包括糊边压泡折边装置、上支架、抱盒机械手和折入成型装置。抱盒机械手将盒胚和连接在盒胚下端的装饰纸同时移动到糊边压泡折边装置的上方,通过折入成型装置将装饰纸包覆在盒胚的外周侧,而后糊边压泡折边装置对盒胚的外周侧进行压泡加工;将装饰纸低压到盒胚内部并使其贴附在盒胚的内侧壁上,完成盒胚的成型加工。
4.针对上述中的相关技术,发明人认为盒胚成型后,从成型机的出料端掉落,需要工人弯腰拾取,而后对盒胚进行摆放或装箱,工人的工作牢度较大。
技术实现要素:
5.为了便于对成型的盒胚进行收集整理,降低人工牢度,本技术提供一种抱盒成型机。
6.本技术提供的一种抱盒成型机采用如下的技术方案:
7.一种抱盒成型机,包括成型机本体,所述成型机本体的出料端设有用于传料的传料组件,所述传料组件包括水平设置的传料架,所述传料架中转动设置有传送带,所述传料架一端的外侧壁上安装有用于带动所述传送带转动的驱动器;所述传送带一侧的传料架上设有用于对盒胚进行限位的限位板,所述限位板竖直设置。
8.通过采用上述技术方案,盒胚脱离成型机本体后,由成型机本体的出料端掉落在传送带上,并因惯性与限位板接触。限位板对盒胚进行限位,使盒胚不易因惯性滚落到传送带外。即有助于保证盒胚均由传送带传送至指定位置,无需工人格外拾捡盒胚,只需要整理传送带上的盒胚即可。便于对成型的盒胚进行收集和整理,降低了人工牢度。
9.可选的,所述传料架远离限位板的一侧安装有用于将传送带上的盒胚向靠近限位板方向推动的推动组件;所述推动组件远离所述成型机本体的一侧设有与传料架连接的调节组件,所述调节组件包括用于改变盒胚位置的调节板。
10.通过采用上述技术方案,推动组件将传送带上的盒胚向靠近限位板的方向推动,使传送带上的盒胚保持一致的朝向,便于工人收集整理,降低人工牢度。调节组件对经过推动组件调整的盒胚进行再纠偏,即传送带上经过推动组件推动后的盒胚有水平设置的和竖直设置的两种,调节组件将水平设置的全部调整成竖直设置,进一步便于工人对盒胚进行收集和整理,无需工人手动调整,降低了人工牢度。
11.可选的,所述推动组件包括与传料架连接的动力缸,所述动力缸的输出端上设有用于与盒胚接触的推板;
12.所述动力缸上设有用于检测盒胚的传感器,所述传感器电连接有控制器,所述控制器与动力缸电连接。
13.通过采用上述技术方案,传感器检测到传送带的盒胚移动到推板前方时,即向控制器传输信号,控制器控制动力缸带动推板移动,将盒胚向靠近限位板的方向推动,对盒胚的角度和位置进行调整。
14.可选的,所述调节板靠近限位板的一侧设有向靠近限位板的方向倾斜的纠偏板。
15.通过采用上述技术方案,调节板与水平置于传送带上的盒胚的一端接触,使盒胚转动。限位板对盒胚进行推挤,使盒胚呈竖直状态。有助于使传送带上的盒胚均呈一致的状态,并处于同一条直线上,便于工人收集整理。
16.可选的,所述调节组件包括与传料架连接的连接座,所述连接座上设有水平设置的连接杆,所述连接杆上螺纹连接有连接管,所述连接管远离所述连接杆的一端与所述调节板连接。
17.通过采用上述技术方案,连接管与连接杆螺纹连接,有助于工人根据盒胚的大小和宽窄对纠偏板为位置进行调节,使传送带上能够输送不同规格的盒胚,提高了成型机的灵活性。
18.可选的,所述限位板靠近传送带的一侧设有光滑层。
19.通过采用上述技术方案,光滑层有助于减小盒胚与限位板之间的摩擦力,从而不易损坏盒胚或者改变盒胚的朝向。
20.可选的,所述传送带远离成型机本体的一端设有与传料架连接,且向下倾斜设置的传盒板。
21.通过采用上述技术方案,工人提前在传送带的下料端下方放置用于盛装盒胚的箱子,盒胚脱离传送带后移动到传盒板上,沿传盒板下移,掉落在箱子中。无需工人手动从传送带上拿取盒胚,降低了人工牢度。
22.可选的,所述传盒板与所述传料架可拆卸连接。
23.通过采用上述技术方案,便于工人对传盒板进行更换,从而使用适合传送盒胚的传盒板,提高了抱盒成型机的灵活性。
24.综上所述,本技术包括以下至少一种有益技术效果:
25.1.限位板有助于避免掉落在传送带上的盒胚脱离传送带,从而有助于避免工人格外拾取掉落的盒胚,传送带将盒胚统一输送到一个位置,工人无需弯腰拾取,也无需往复走动,拾取固定一点的盒胚即可,工作牢度低;
26.2.推动组件和调节组件配合,使传送带上的盒胚均呈同一个状态,且均位于同一条直线上,便于工人对盒胚进行收集整理,有助于提高收集盒胚的效率;
27.3.传盒板具有引导作用,便于将传送带上的盒胚引导到一个位置,从而使工人可提前放置有个箱子在传盒板下方,无需工人手动拾取传送带上的盒胚,降低了人工牢度。
附图说明
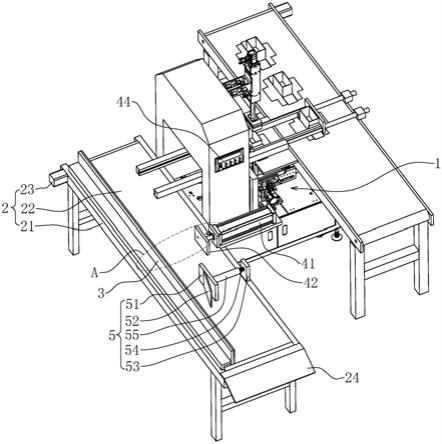
28.图1是抱盒成型机的整体结构示意图;
29.图2是图1中a部分的局部放大示意图。
30.附图标记说明:1、成型机本体;2、传料组件;21、传料架;22、传送带;23、驱动器;24、传盒板;3、限位板;31、光滑层;4、推动组件;41、动力缸;42、推板;43、传感器;44、控制器;5、调节组件;51、调节板;52、纠偏板;53、连接座;54、连接杆;55、连接管。
具体实施方式
31.本技术实施例公开一种抱盒成型机。参照图1,一种抱盒成型机包括成型机本体1,成型机本体1的出料端设有用于传送盒胚的传料组件2。传料组件2包括水平设置的传料架21,传料架21中转动设置的传送带22,传料架21一端的外侧壁上安装有用于带动传送带22转动的驱动器23。具体的,驱动器23设置为旋转电机,驱动器23的输出端通过轴承穿设传料架21,与传料架21一端的传动辊连接。启动驱动器23后,驱动器23带动传动辊转动,传送带22缠绕在传动辊上,受传动辊驱动发生转动。传动辊共设置有两个,两个传动辊分别位于传料架21的两端,且均与传料架21通过轴承转动连接。
32.参照图1,传送带22一侧的传料架21上安装有用于对盒胚进行限位的限位板3。限位板3的位置根据成型机本体1出料端的位置设置。例如,若盒胚从成型机本体1出料端掉落时,是竖直向下的移动轨迹,则将限位板3设置在传料架21的任意一侧即可,用于对盒胚进行限位,使盒胚不易脱离传送带22。若盒胚从成型机本体1出料端掉落时,运动轨迹为抛物线,则将限位板3设置在传料架21远离成型机本体1出料端的一侧,用于对盒胚进行阻挡。
33.参照图2,限位板3竖直设置,且用于与盒胚接触的一侧设有光滑层31。光滑层31可以是涂刷在限位板3表面的涂料,起到提高限位板3表面光滑度的作用。光滑层31也可以是塑料层,粘结在限位板3表面。
34.参照图1和图2,传料架21远离限位板3的一侧安装有用于将传送带22上的盒胚向靠近限位板3方向推动的推动组件4。推动组件4包括与传料架21连接的动力缸41,动力缸41设置为气缸且水平设置。动力缸41的输出端上连接有竖直设置的推板42。动力缸41靠近成型机本体1的一侧设有用于检测传送带22上盒胚的位置的传感器43,传感器43电连接有控制器44,控制器44与动力缸41电连接。传感器43可以是距离传感器、红外漫反射传感器、红外传感器或雷达传感器等,当传送带22上的盒胚移动到传感器43的前方时,传感器43能够检测到传送带22上有盒胚即可。而后传感器43将信息传输给控制器44,控制器44可以是mcu、单片机或plc控制系统。接收到信息后控制动力缸41启动,动力缸41的输出端向靠近限位板3的方向移动,从而使推板42与盒胚接触,将盒胚推到限位板3上。而后控制器44控制动力缸41的输出端复位。
35.在被动力缸41推动前,传送带22上的盒胚位置不确定,朝向不确定。有的盒胚的长度方向与传送带22的运动方向平行,有的盒胚的长度方向与传送带22的运动方向垂直,有的盒胚倾斜置于传送带22上。
36.盒胚被推到限位板3上后,长度方向与传送带22运动方向平行的盒胚和长度方向与传送带22运动反向垂直的盒胚位置改变,朝向不变;倾斜置于传送带22上的盒胚位置改变,朝向改变成长度方向与传送带22的运动方向垂直或平行。
37.参照图1,推动组件4远离成型机本体1的一侧设有与传料架21连接的调节组件5。调节组件5包括与传料架21连接的连接座53,连接座53与限位板3连接在传料架21的不同
侧。连接座53上连接有水平设置且向靠近限位板3方向延伸的连接杆54,连接杆54上螺纹连接有水平设置的连接管55,连接管55远离连接杆54的一端连接有调节板51。
38.参照图1,调节板51靠近限位板3的一侧设有向靠近限位板3的方向倾斜的纠偏板52。长度方向与传送带22运动方向垂直的盒胚与调节板51接触,受到调节板51的阻挡,发生转动。而后又与纠偏板52接触,受到纠偏板52的阻挡,变成长度方向与传送带22的运动方向平行。传送带22上长度方向与传送带22运动方向平行的盒胚不与调节板51接触,从纠偏板52与限位板3之间的空隙穿过。
39.参照图1,传送带22远离成型机本体1的一端设有与传料架21可拆卸连接,且向下倾斜设置的传盒板24。盒胚脱离传送带22后与传盒板24接触,并沿传盒板24向下移动,而后掉落。
40.本技术实施例一种抱盒成型机的实施原理为:工人将用于收纳盒胚的箱子放置在传盒板24的下方,传送带22上的盒胚被推动组件4和调节组件5纠偏到同一条直线上,即盒胚的一侧与限位板3接触,且盒胚的长度方向均与传送带22的运动方向平行。盒胚沿传盒板24自动下滑,滑动到箱子中。工人只需要当箱子中的盒胚叠摞一定高度后,移动箱子即可。人工牢度低,有助于提高盒胚的收集整理效率。
41.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1